
一种自走式黄瓜收获机器人.pdf

雨巷****珺琦

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种自走式黄瓜收获机器人.pdf
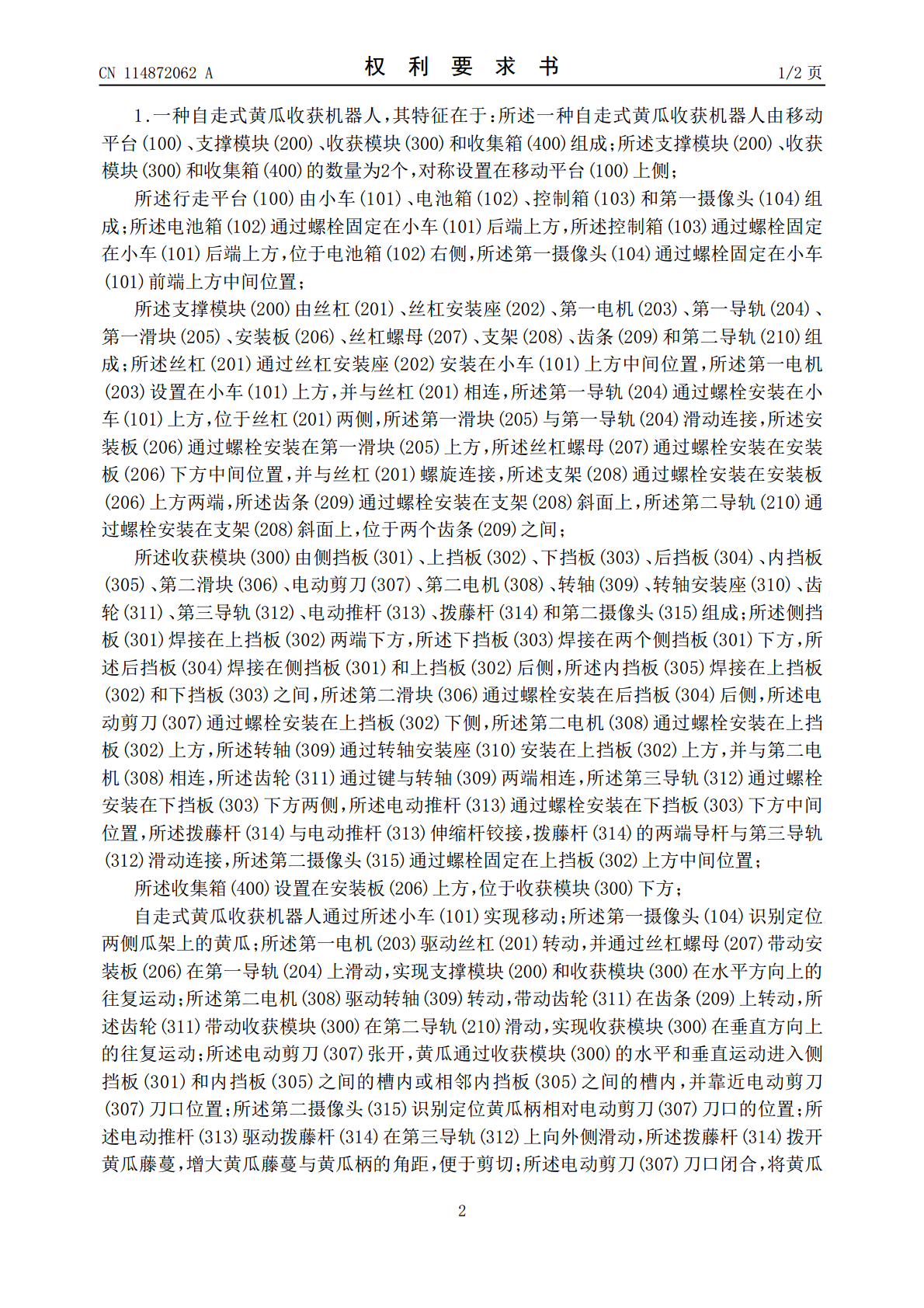
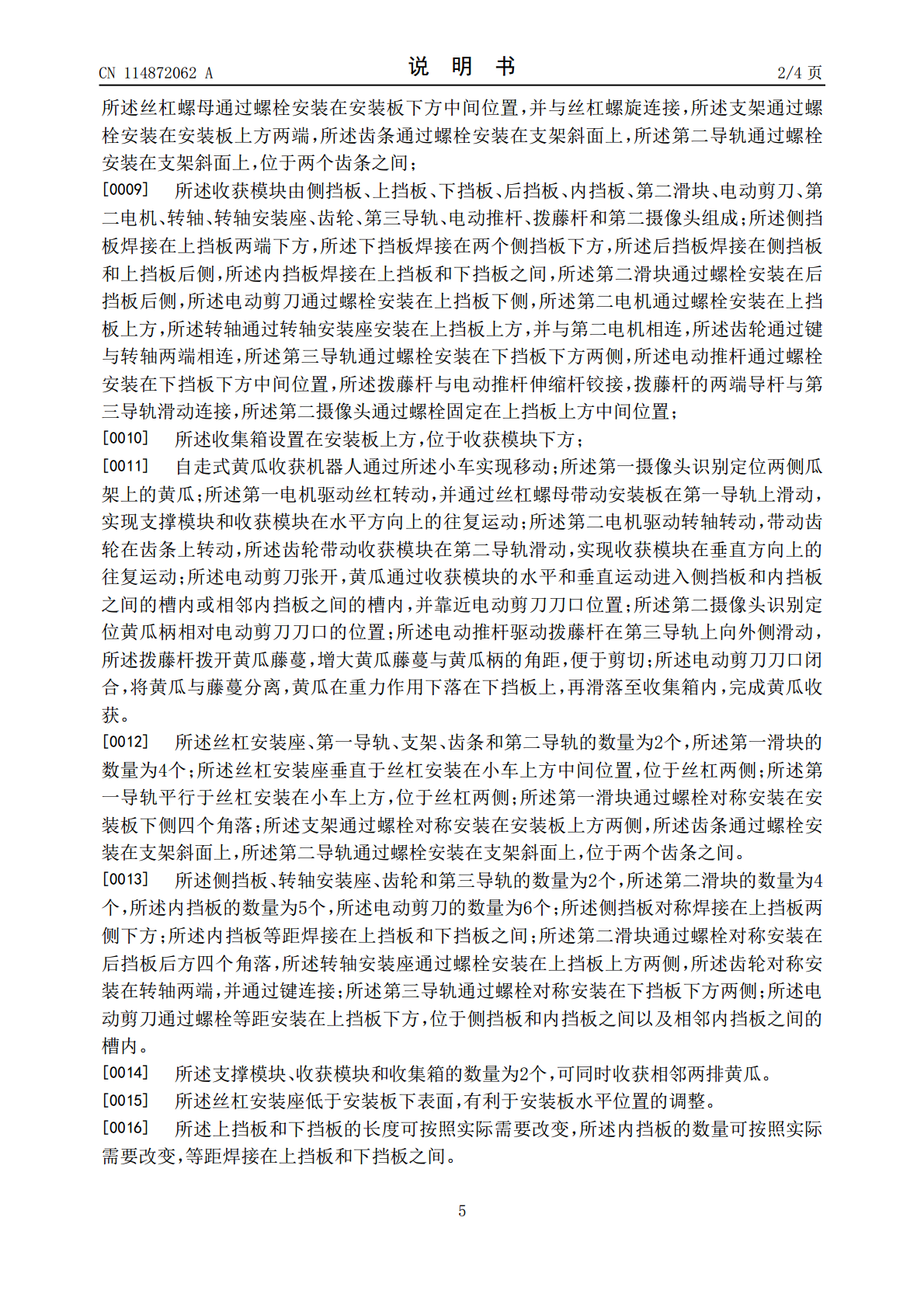
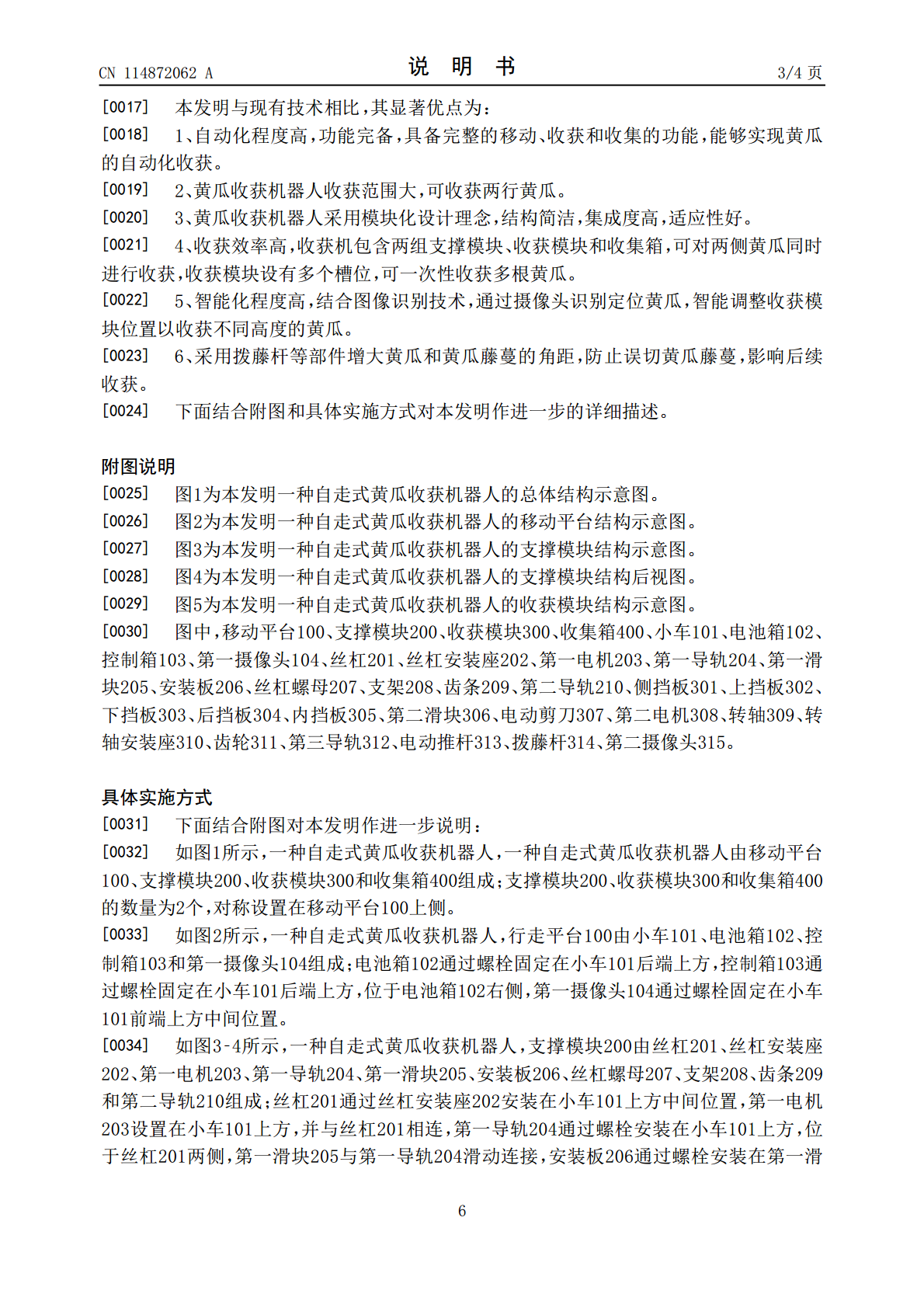
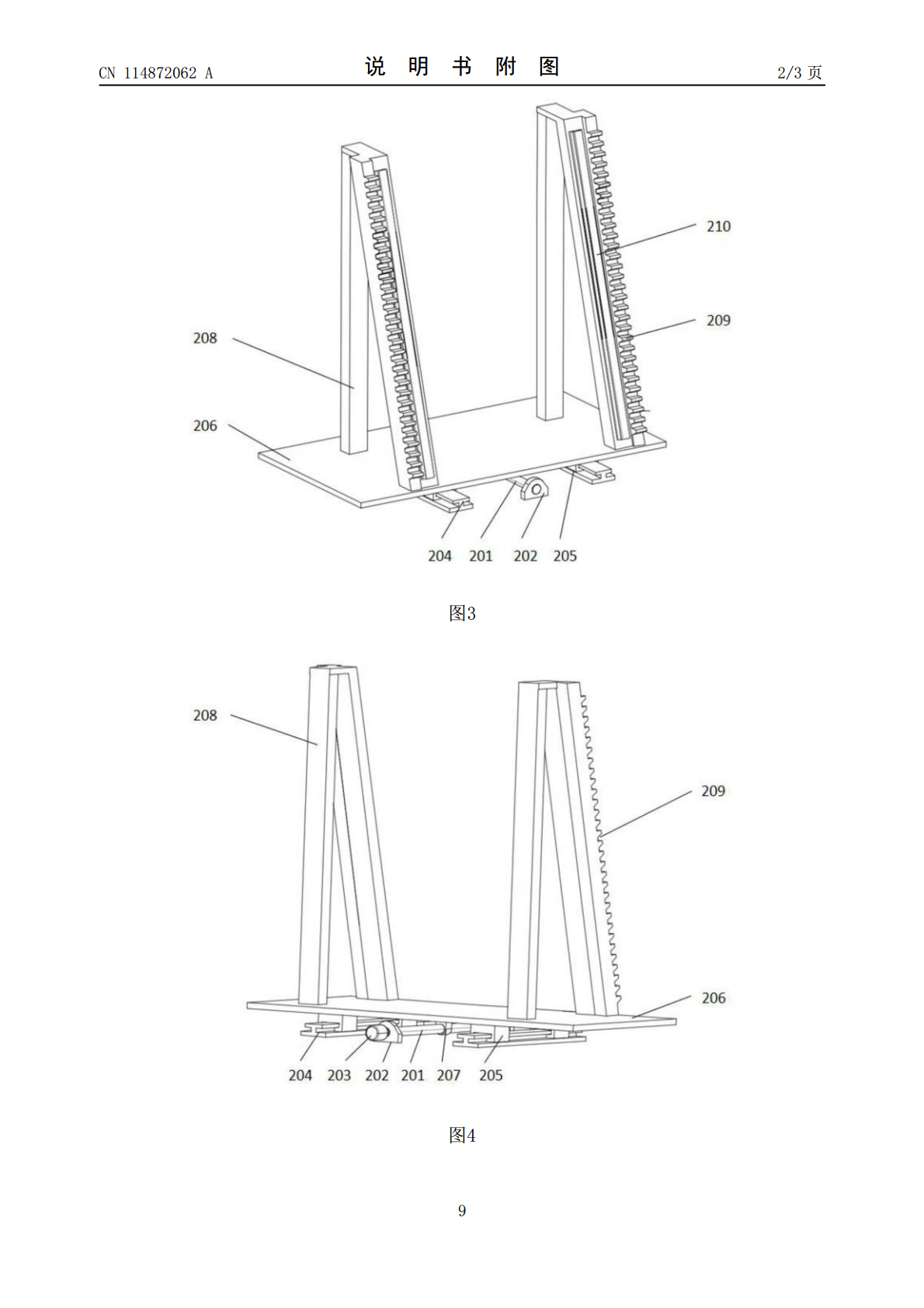
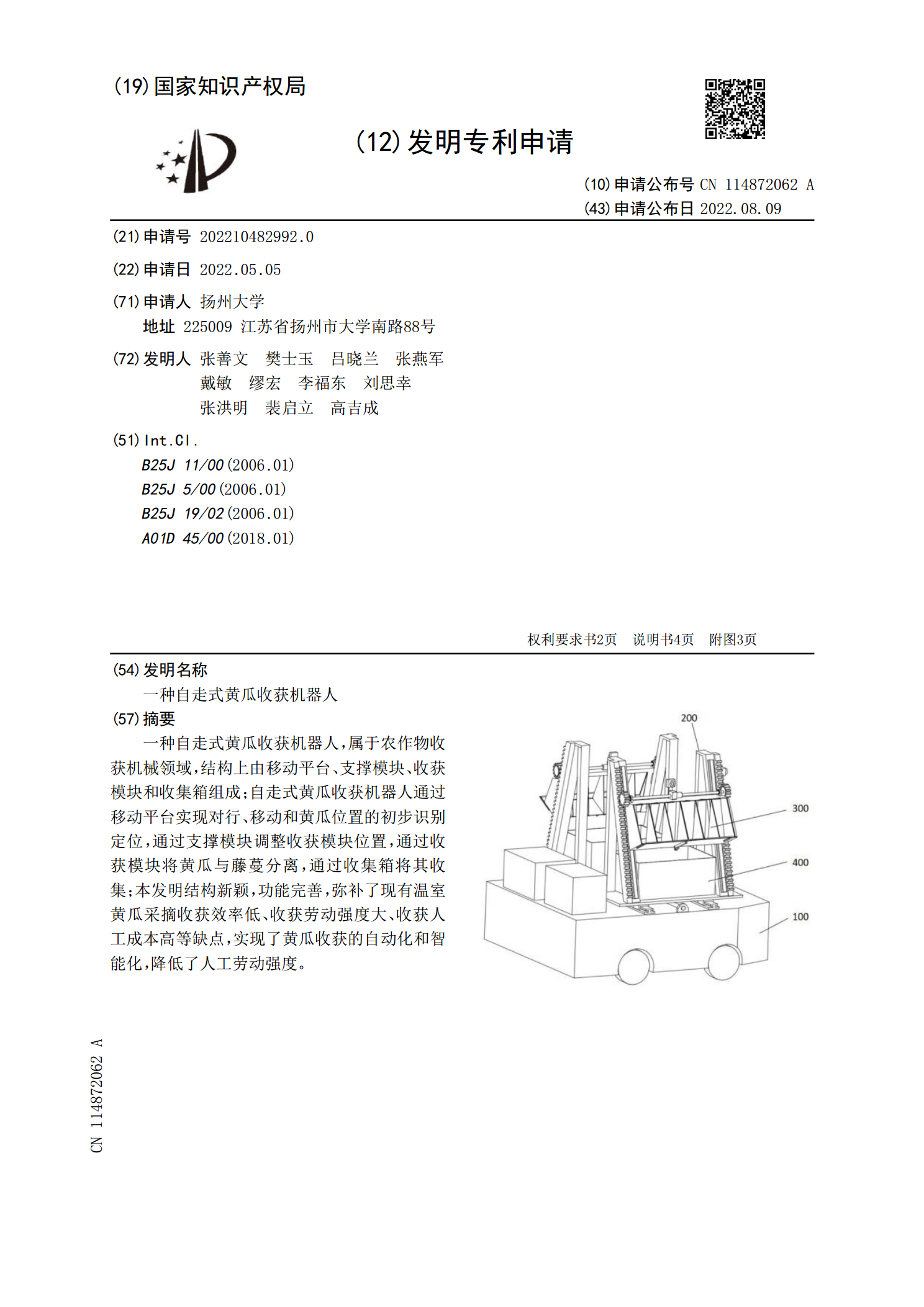
一种自走式黄瓜收获机器人,属于农作物收获机械领域,结构上由移动平台、支撑模块、收获模块和收集箱组成;自走式黄瓜收获机器人通过移动平台实现对行、移动和黄瓜位置的初步识别定位,通过支撑模块调整收获模块位置,通过收获模块将黄瓜与藤蔓分离,通过收集箱将其收集;本发明结构新颖,功能完善,弥补了现有温室黄瓜采摘收获效率低、收获劳动强度大、收获人工成本高等缺点,实现了黄瓜收获的自动化和智能化,降低了人工劳动强度。

一种自走式块茎收获机.pdf
本发明公开一种自走式块茎收获机,包括行走机构、操作机构和挖掘输送分离机构,所述挖掘输送分离机构包括挖掘铲和输送分离机架,输送分离机架与机架相连,输送分离机架上设有若干根行星轮轴,每根行星轮轴上装有若干个行星轮,相邻两个行星轮之间有间隔套,行星轮上均匀分布有弧形传送齿,输送分离机架端头的行星轮轴由动力源驱动。本发明中,挖掘铲将作物从泥土中铲出,之后经过行星轮实现作物的传输。行星轮在传送的过程中,弧形传送齿会将作物上的泥土去掉、但不会损伤作物表皮。另外,输送分离机架通过连接轴、升降控制油缸和深浅控制杆与机架相
一种自走式作物收获装置.pdf
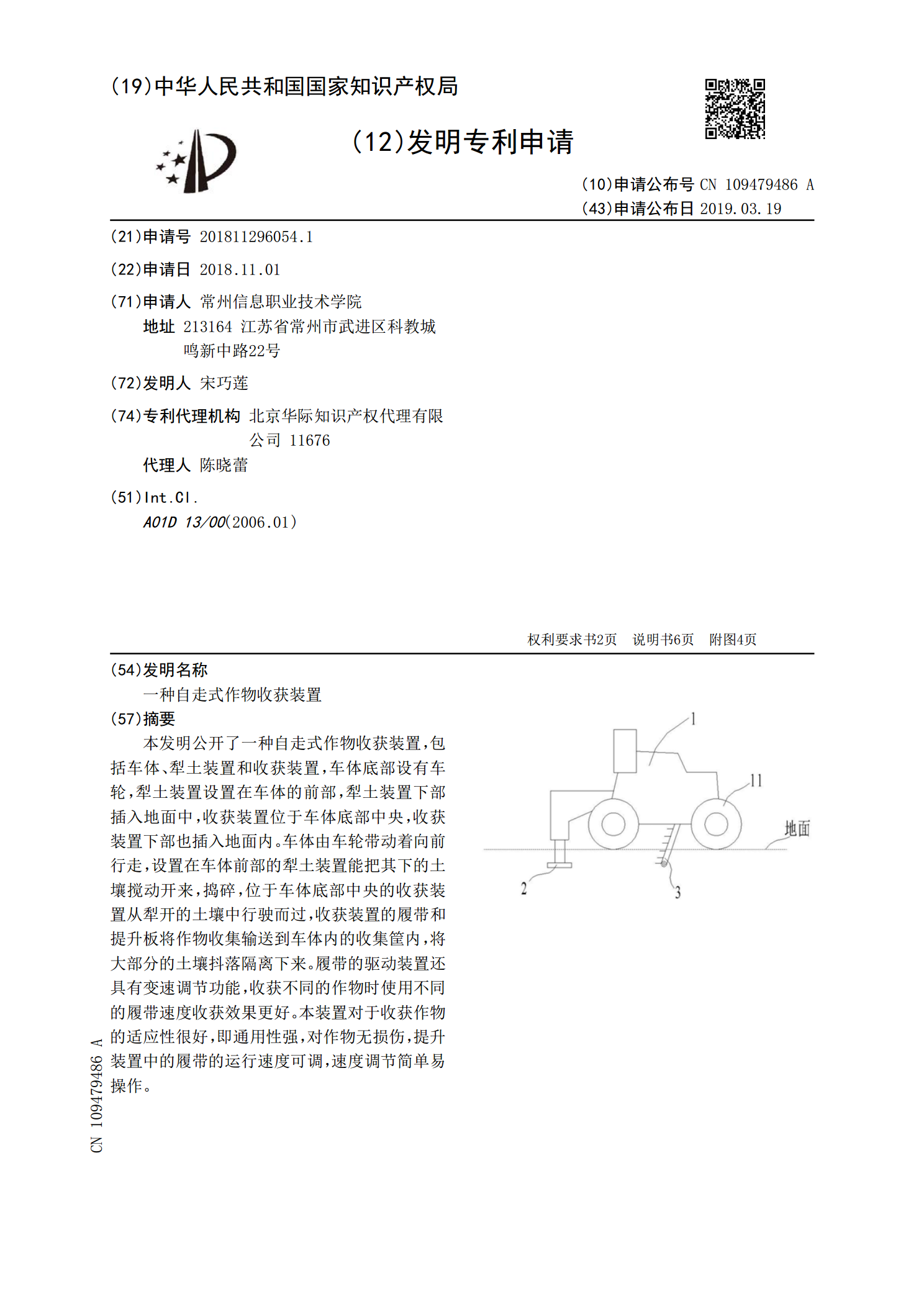
本发明公开了一种自走式作物收获装置,包括车体、犁土装置和收获装置,车体底部设有车轮,犁土装置设置在车体的前部,犁土装置下部插入地面中,收获装置位于车体底部中央,收获装置下部也插入地面内。车体由车轮带动着向前行走,设置在车体前部的犁土装置能把其下的土壤搅动开来,捣碎,位于车体底部中央的收获装置从犁开的土壤中行驶而过,收获装置的履带和提升板将作物收集输送到车体内的收集筐内,将大部分的土壤抖落隔离下来。履带的驱动装置还具有变速调节功能,收获不同的作物时使用不同的履带速度收获效果更好。本装置对于收获作物的适应性很
一种自走式榨菜收获机.pdf
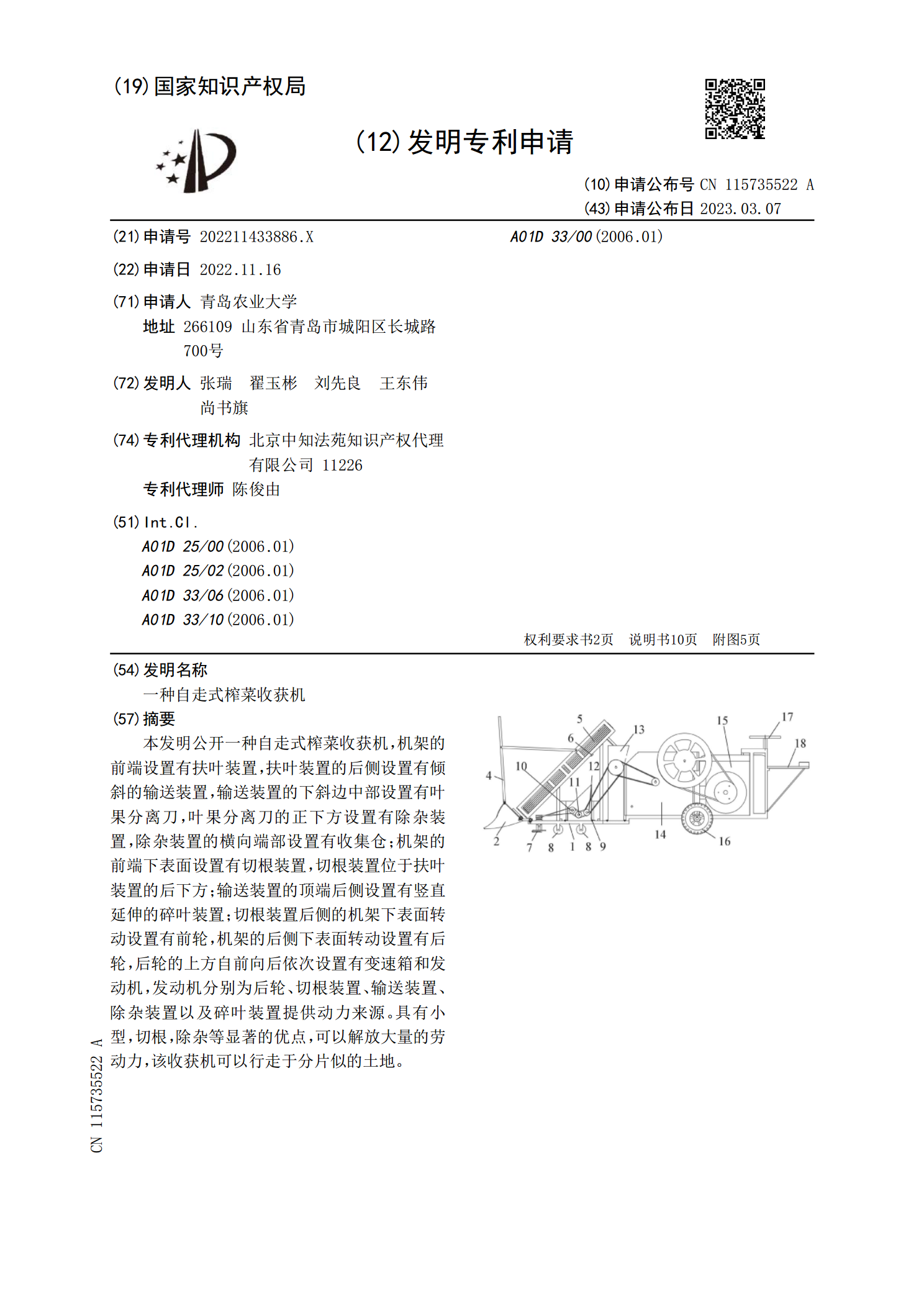
本发明公开一种自走式榨菜收获机,机架的前端设置有扶叶装置,扶叶装置的后侧设置有倾斜的输送装置,输送装置的下斜边中部设置有叶果分离刀,叶果分离刀的正下方设置有除杂装置,除杂装置的横向端部设置有收集仓;机架的前端下表面设置有切根装置,切根装置位于扶叶装置的后下方;输送装置的顶端后侧设置有竖直延伸的碎叶装置;切根装置后侧的机架下表面转动设置有前轮,机架的后侧下表面转动设置有后轮,后轮的上方自前向后依次设置有变速箱和发动机,发动机分别为后轮、切根装置、输送装置、除杂装置以及碎叶装置提供动力来源。具有小型,切根,除

自走式籽粒收获机.pdf
目的是提供一种设计合理、结构简单,体积小、重量轻、耗能低、易生产、好安装、易操作,易维修、损毁率低,省工省时、低成本、均匀、质量好、轻便、效率高、适用范围广的自走式籽粒收获机,具体特征包括机架(10)的下部装有机轮(1)、后部装有方向架(2)、上部装有电动机(8)、中下部装有蓄电池(4)、前部装有控穗器(5)、中部装有籽粒收获箱(6)、扒穗脱粒器(7)、籽粒排出口(9)、风扇(11)、后下部装有编织袋(3),方向架(2)装有电源开关(12)。