
自走式缠绕机、缠绕系统以及方法.pdf

大渊****公主

1/10

2/10
3/10
4/10
5/10
6/10

7/10

8/10

9/10
10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
自走式缠绕机、缠绕系统以及方法.pdf
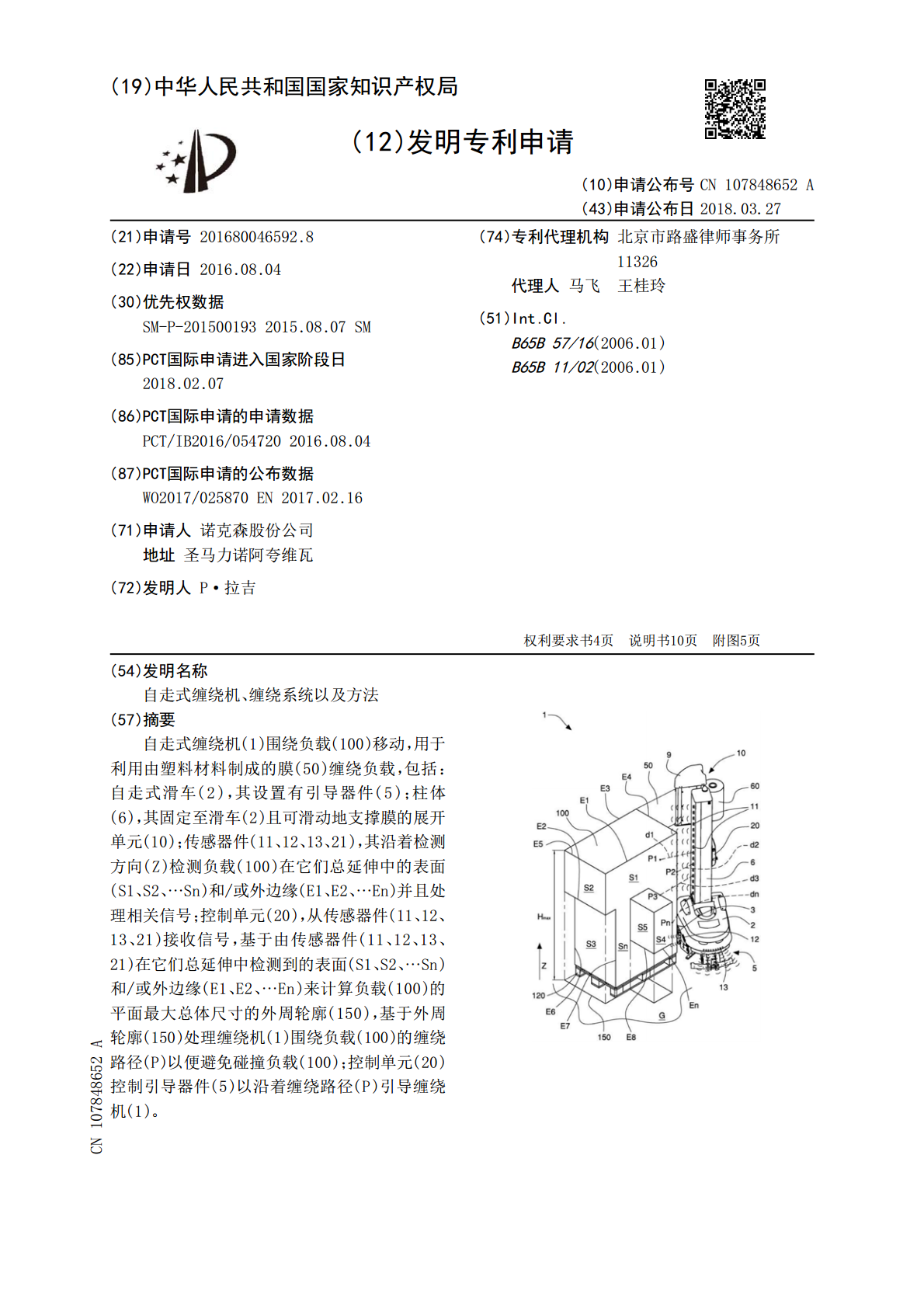
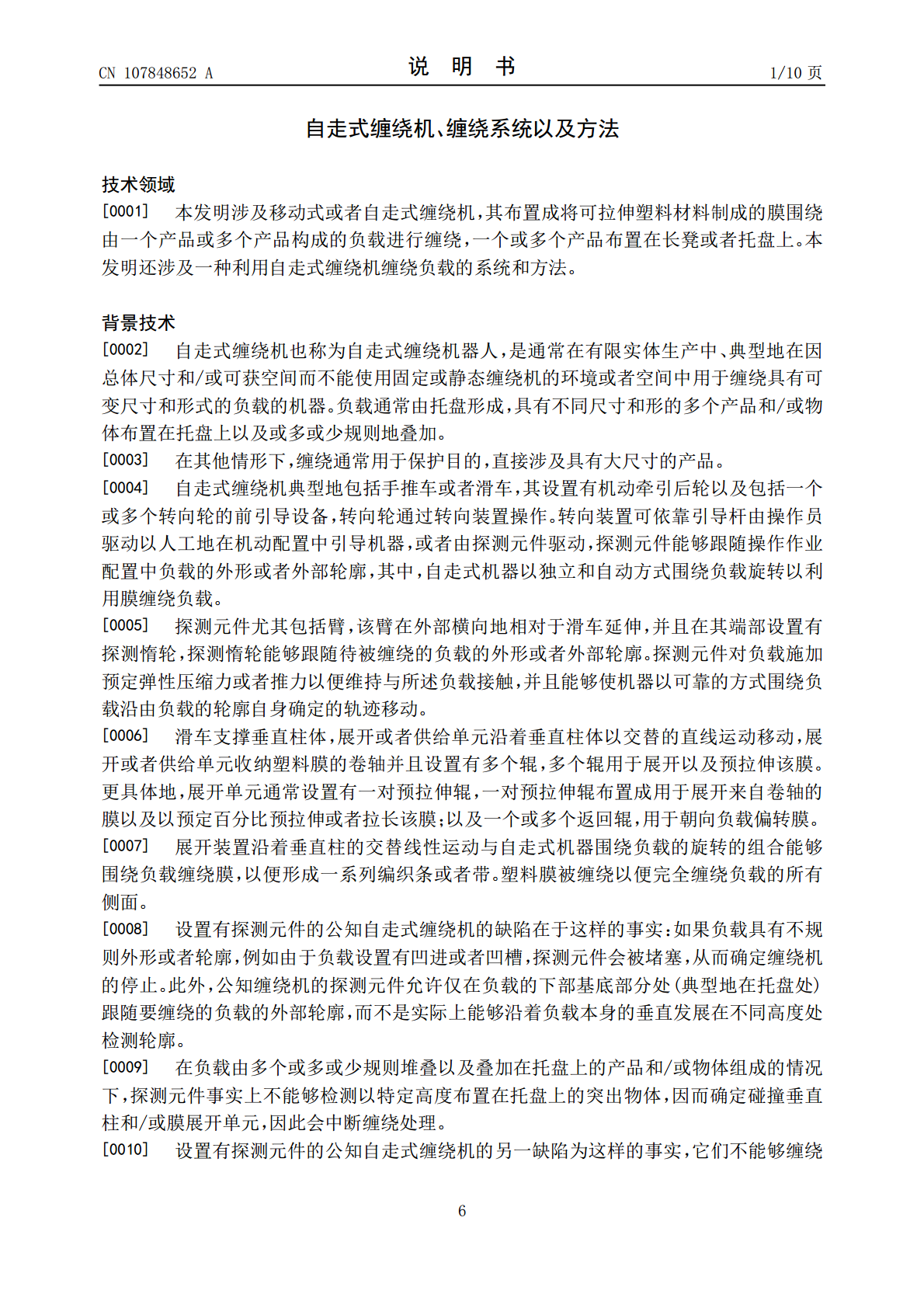
自走式缠绕机(1)围绕负载(100)移动,用于利用由塑料材料制成的膜(50)缠绕负载,包括:自走式滑车(2),其设置有引导器件(5);柱体(6),其固定至滑车(2)且可滑动地支撑膜的展开单元(10);传感器件(11、12、13、21),其沿着检测方向(Z)检测负载(100)在它们总延伸中的表面(S1、S2、…Sn)和/或外边缘(E1、E2、…En)并且处理相关信号;控制单元(20),从传感器件(11、12、13、21)接收信号,基于由传感器件(11、12、13、21)在它们总延伸中检测到的表面(S1、S2
自走式缠绕机器人.pdf
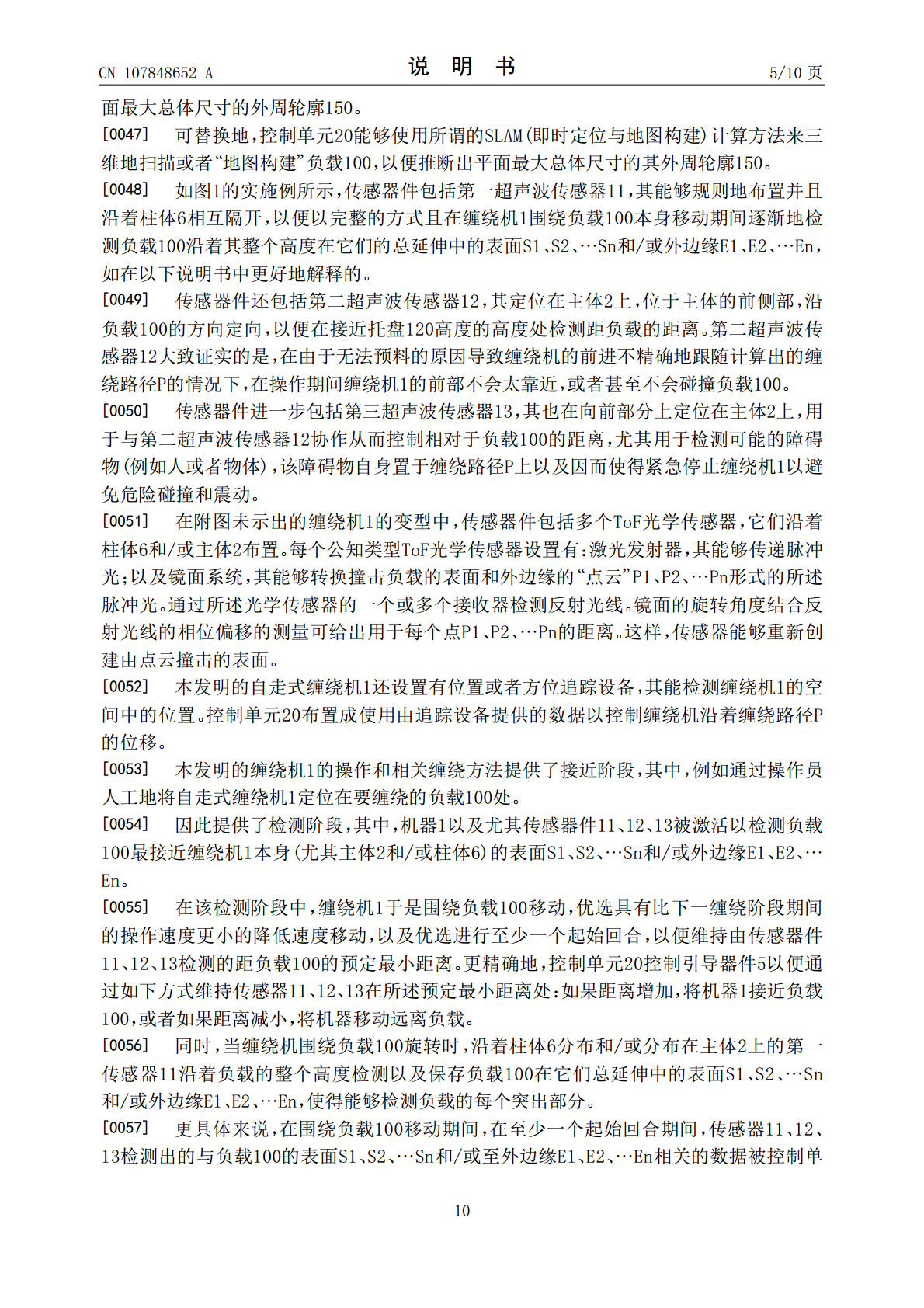
本发明提供自走式缠绕机器人,包括悬臂连杆、悬臂支柱、固定杆、伺服电机、辊筒、转向轮胎、套杆、安全软板以及内杆,机器人主体上端面后侧焊接有悬臂支柱,安装座内部中间位置安装有悬臂连杆,膜座上端面前侧安装有固定杆,缠绕膜后侧安装有辊筒,辊筒下端面装配有伺服电机,该设计解决了原有货物包装设备适用度较差的问题,机器人主体左端面安装有安全软板,连接杆内部左侧安装有套杆,套杆内部安装有内杆,内杆下端面连接有转向轮胎,该设计解决了原有货物包装设备移动不够便捷的问题,与现有技术相比,本发明结构合理,包装自动化,经济成本低,

倾斜式卧式缠绕机.pdf
本发明涉及一种倾斜式卧式缠绕机。本发明所要解决的技术问题是提供一种结构简单、节省人力且使用方便的倾斜式卧式缠绕机。本发明包括缠绕机机架、设置于缠绕机机架侧端的驱动仓以及设置于机架上的装配于驱动舱与罐体之间的传动装置。本发明将缠绕机机架改为斜面式,输出有2个轴、多个轴或无级变化式,输出轴经万向轴传给支撑轴,支撑轴再与玻璃钢制品轴相联接,带动玻璃钢制品转动,输出轴、万向轴、支撑轴均设计在斜向的机头架上。机尾架做成和机头架同样斜度的支架,机尾架支撑罐体轴的部分做成托辊轮式,即用两个托辊轮直接托住罐体轴。
一种托盘式在线缠绕机及其缠绕方法.pdf
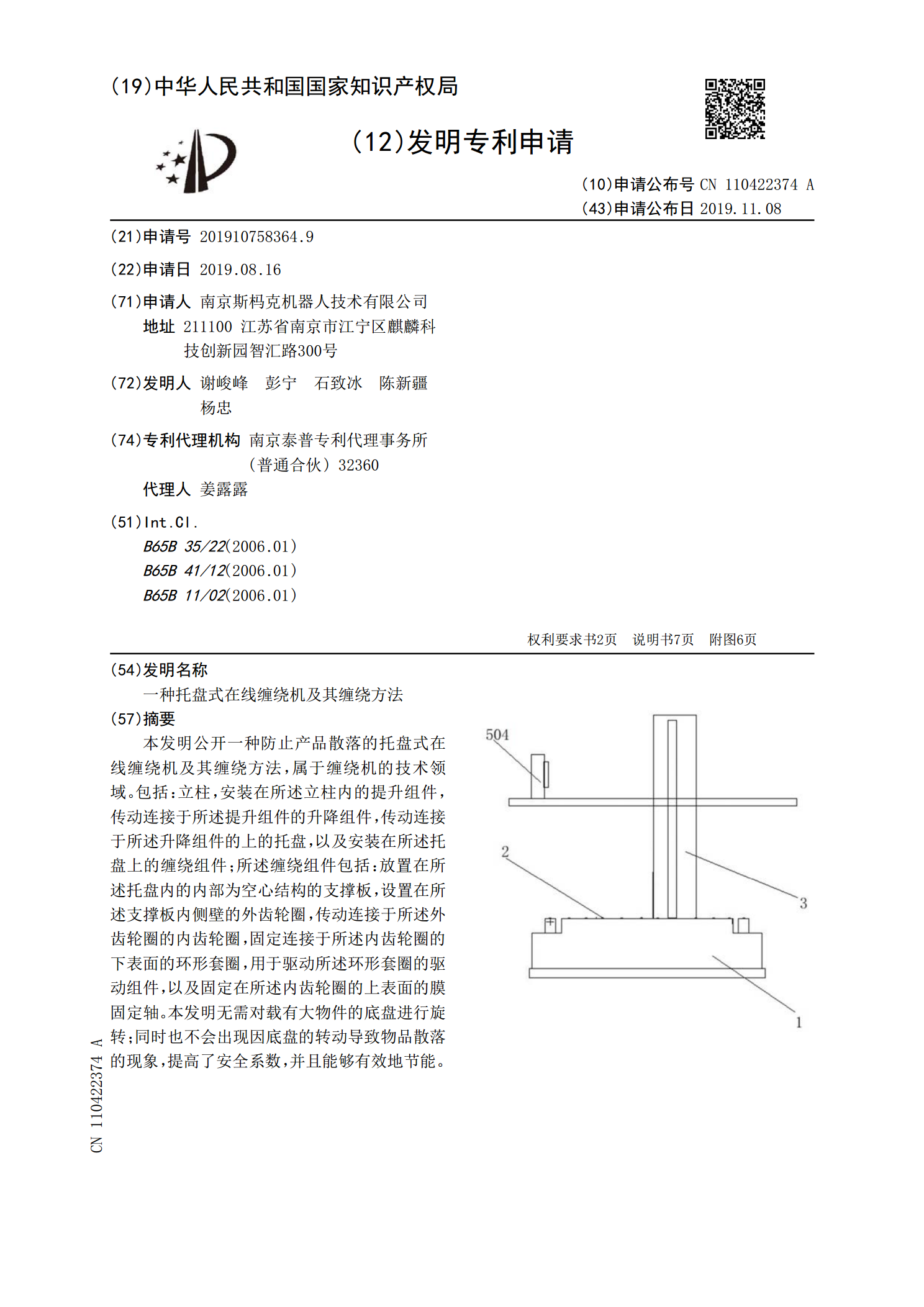
本发明公开一种防止产品散落的托盘式在线缠绕机及其缠绕方法,属于缠绕机的技术领域。包括:立柱,安装在所述立柱内的提升组件,传动连接于所述提升组件的升降组件,传动连接于所述升降组件的上的托盘,以及安装在所述托盘上的缠绕组件;所述缠绕组件包括:放置在所述托盘内的内部为空心结构的支撑板,设置在所述支撑板内侧壁的外齿轮圈,传动连接于所述外齿轮圈的内齿轮圈,固定连接于所述内齿轮圈的下表面的环形套圈,用于驱动所述环形套圈的驱动组件,以及固定在所述内齿轮圈的上表面的膜固定轴。本发明无需对载有大物件的底盘进行旋转;同时也不
一种钢圈缠绕机构以及钢圈缠绕装置.pdf
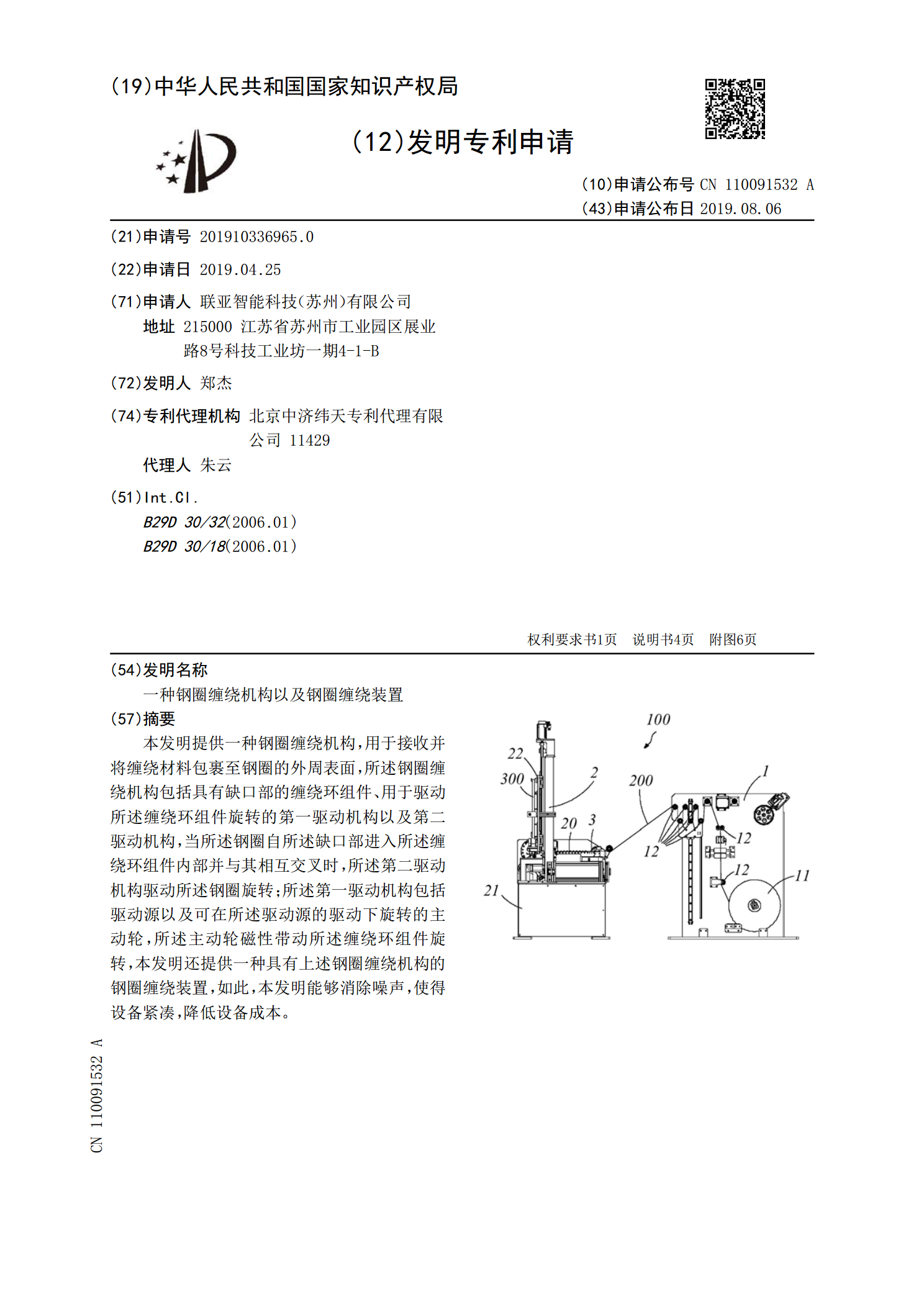
本发明提供一种钢圈缠绕机构,用于接收并将缠绕材料包裹至钢圈的外周表面,所述钢圈缠绕机构包括具有缺口部的缠绕环组件、用于驱动所述缠绕环组件旋转的第一驱动机构以及第二驱动机构,当所述钢圈自所述缺口部进入所述缠绕环组件内部并与其相互交叉时,所述第二驱动机构驱动所述钢圈旋转;所述第一驱动机构包括驱动源以及可在所述驱动源的驱动下旋转的主动轮,所述主动轮磁性带动所述缠绕环组件旋转,本发明还提供一种具有上述钢圈缠绕机构的钢圈缠绕装置,如此,本发明能够消除噪声,使得设备紧凑,降低设备成本。