
一种从蜂窝芯表面测量数据中识别蜂窝边的方法.pdf

永香****能手

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共25页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种从蜂窝芯表面测量数据中识别蜂窝边的方法.pdf
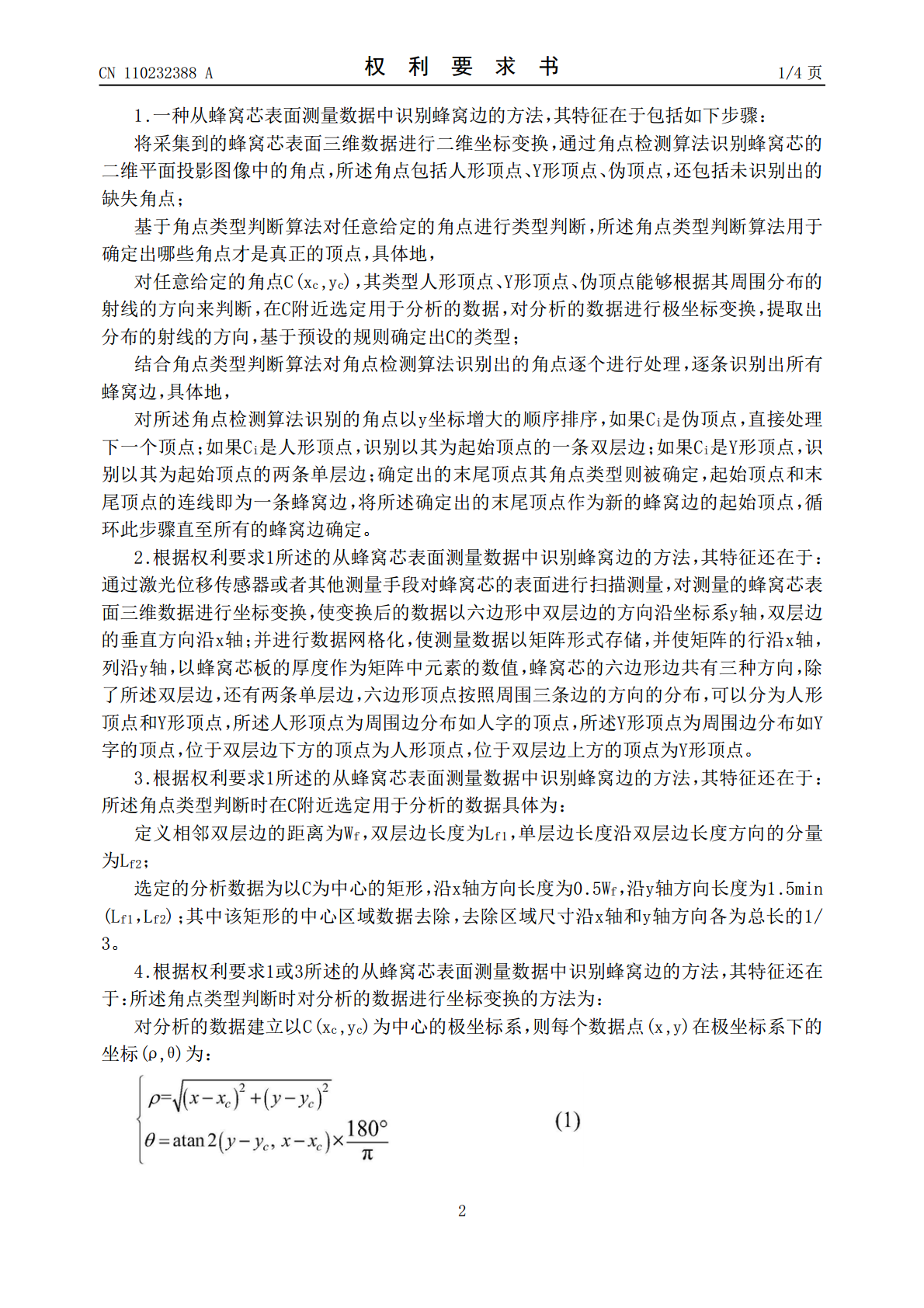
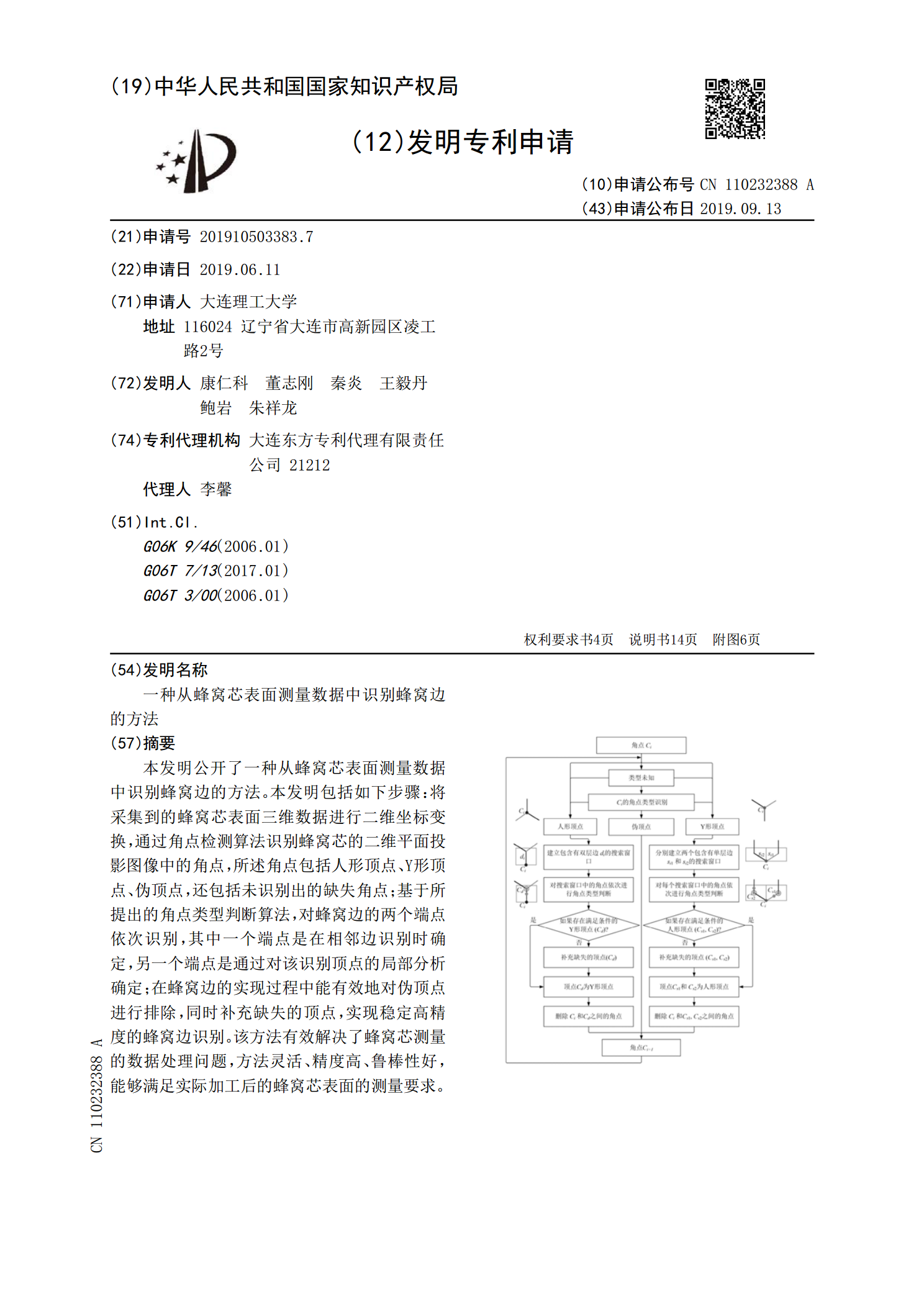
本发明公开了一种从蜂窝芯表面测量数据中识别蜂窝边的方法。本发明包括如下步骤:将采集到的蜂窝芯表面三维数据进行二维坐标变换,通过角点检测算法识别蜂窝芯的二维平面投影图像中的角点,所述角点包括人形顶点、Y形顶点、伪顶点,还包括未识别出的缺失角点;基于所提出的角点类型判断算法,对蜂窝边的两个端点依次识别,其中一个端点是在相邻边识别时确定,另一个端点是通过对该识别顶点的局部分析确定;在蜂窝边的实现过程中能有效地对伪顶点进行排除,同时补充缺失的顶点,实现稳定高精度的蜂窝边识别。该方法有效解决了蜂窝芯测量的数据处理问
一种从蜂窝芯表面测量数据中识别蜂窝边区域的方法.pdf
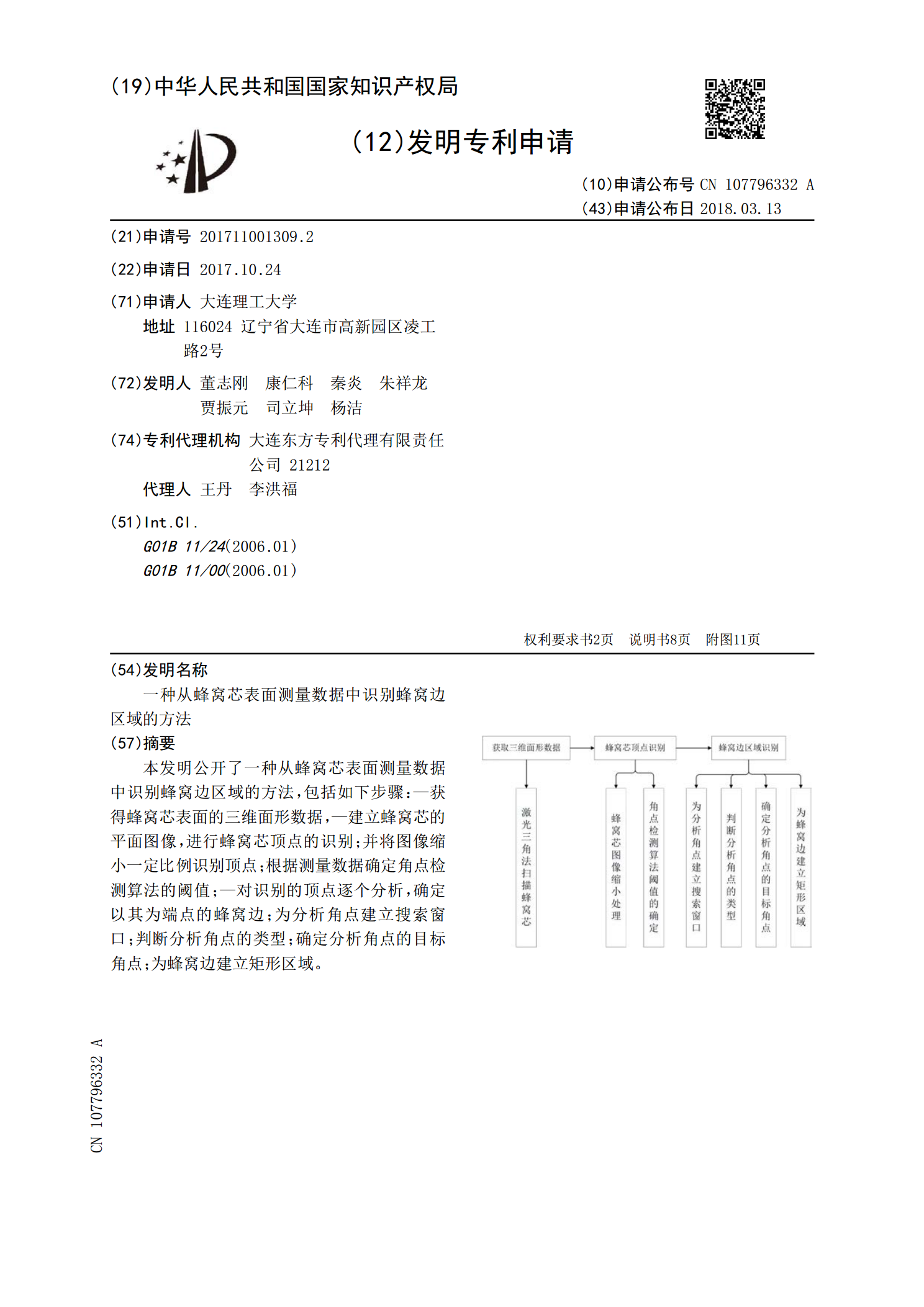
本发明公开了一种从蜂窝芯表面测量数据中识别蜂窝边区域的方法,包括如下步骤:—获得蜂窝芯表面的三维面形数据,—建立蜂窝芯的平面图像,进行蜂窝芯顶点的识别;并将图像缩小一定比例识别顶点;根据测量数据确定角点检测算法的阈值;—对识别的顶点逐个分析,确定以其为端点的蜂窝边;为分析角点建立搜索窗口;判断分析角点的类型;确定分析角点的目标角点;为蜂窝边建立矩形区域。
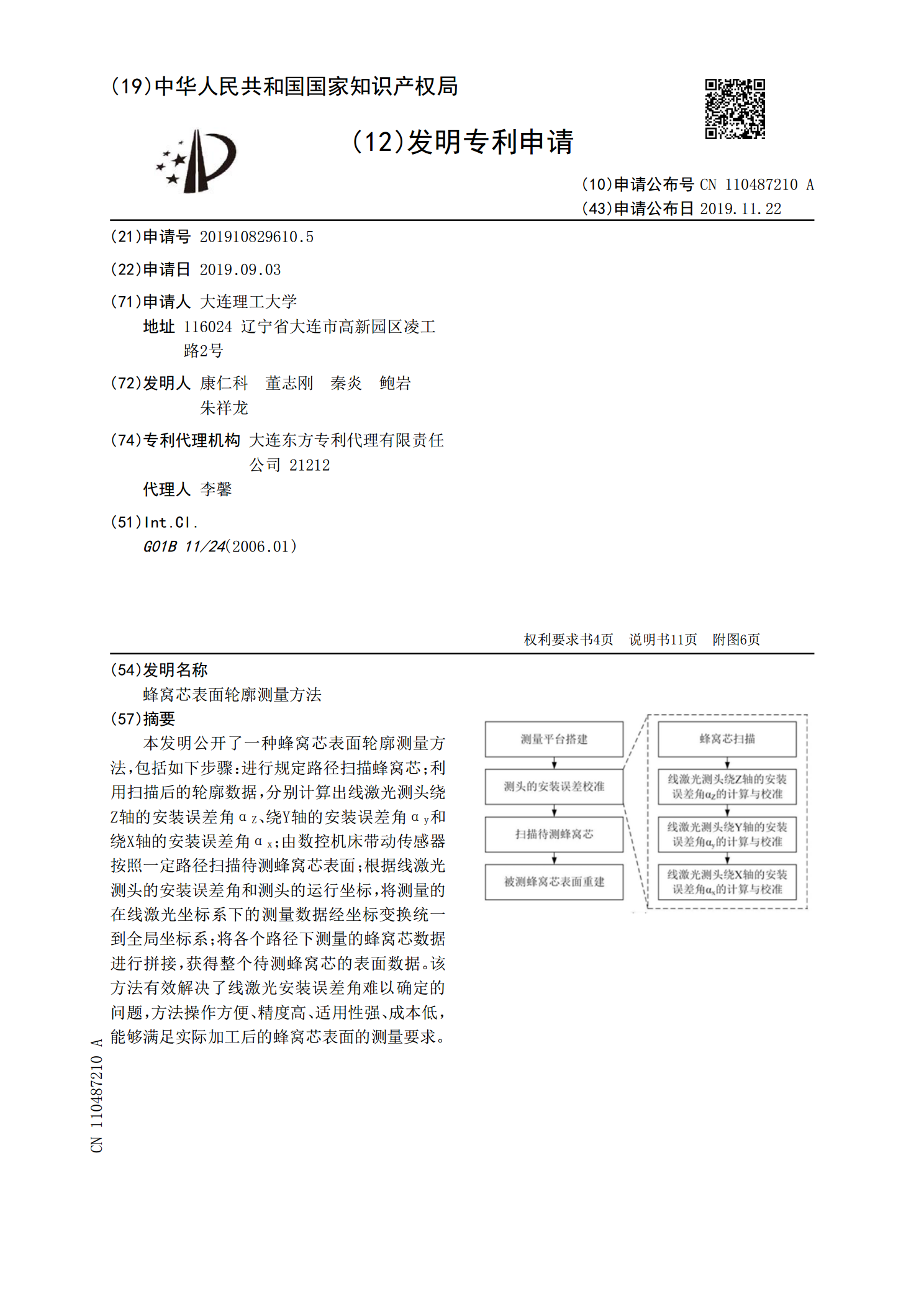
蜂窝芯表面轮廓测量方法.pdf
本发明公开了一种蜂窝芯表面轮廓测量方法,包括如下步骤:进行规定路径扫描蜂窝芯;利用扫描后的轮廓数据,分别计算出线激光测头绕Z轴的安装误差角α
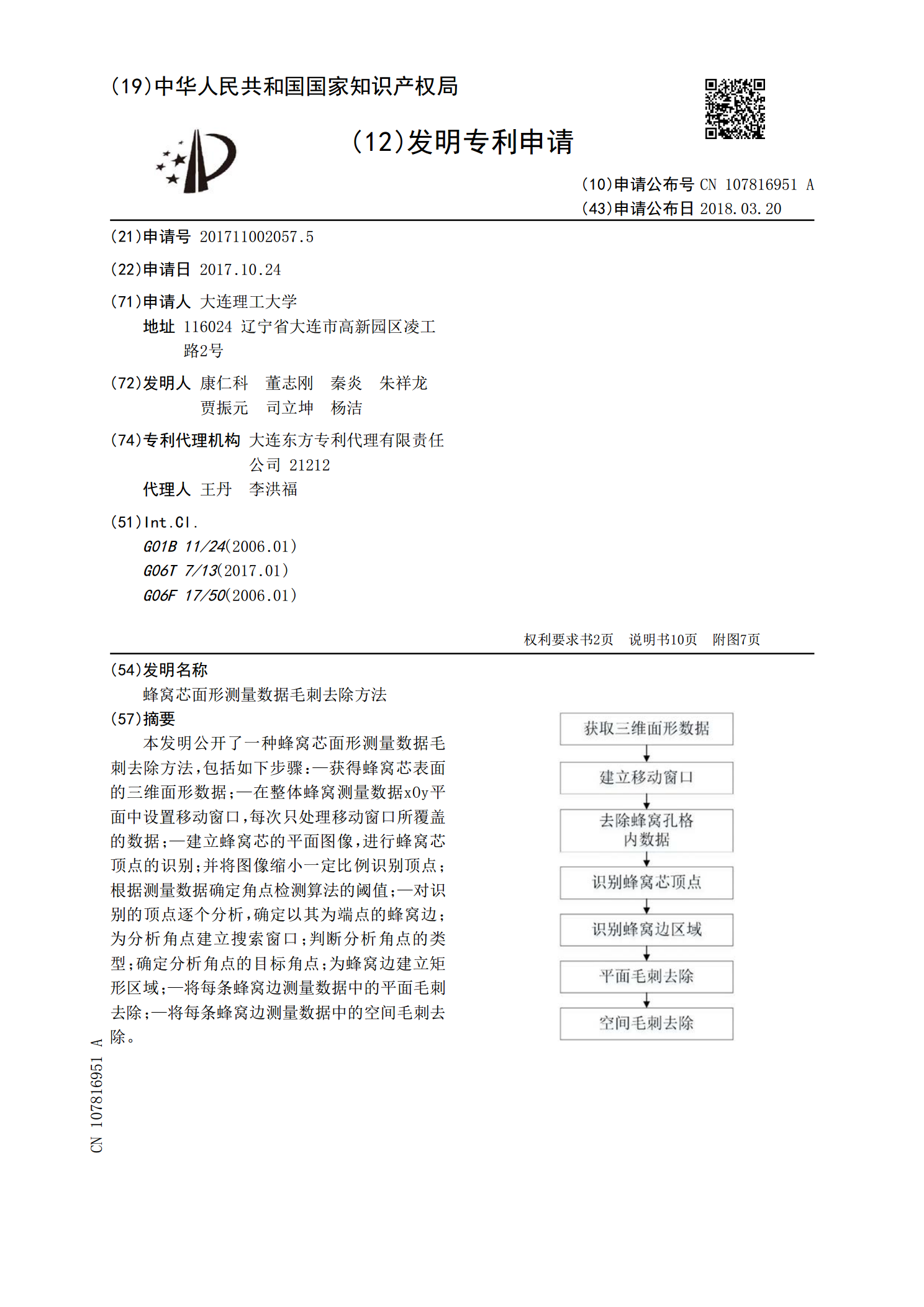
蜂窝芯面形测量数据毛刺去除方法.pdf
本发明公开了一种蜂窝芯面形测量数据毛刺去除方法,包括如下步骤:—获得蜂窝芯表面的三维面形数据;—在整体蜂窝测量数据xOy平面中设置移动窗口,每次只处理移动窗口所覆盖的数据;—建立蜂窝芯的平面图像,进行蜂窝芯顶点的识别;并将图像缩小一定比例识别顶点;根据测量数据确定角点检测算法的阈值;—对识别的顶点逐个分析,确定以其为端点的蜂窝边;为分析角点建立搜索窗口;判断分析角点的类型;确定分析角点的目标角点;为蜂窝边建立矩形区域;—将每条蜂窝边测量数据中的平面毛刺去除;—将每条蜂窝边测量数据中的空间毛刺去除。
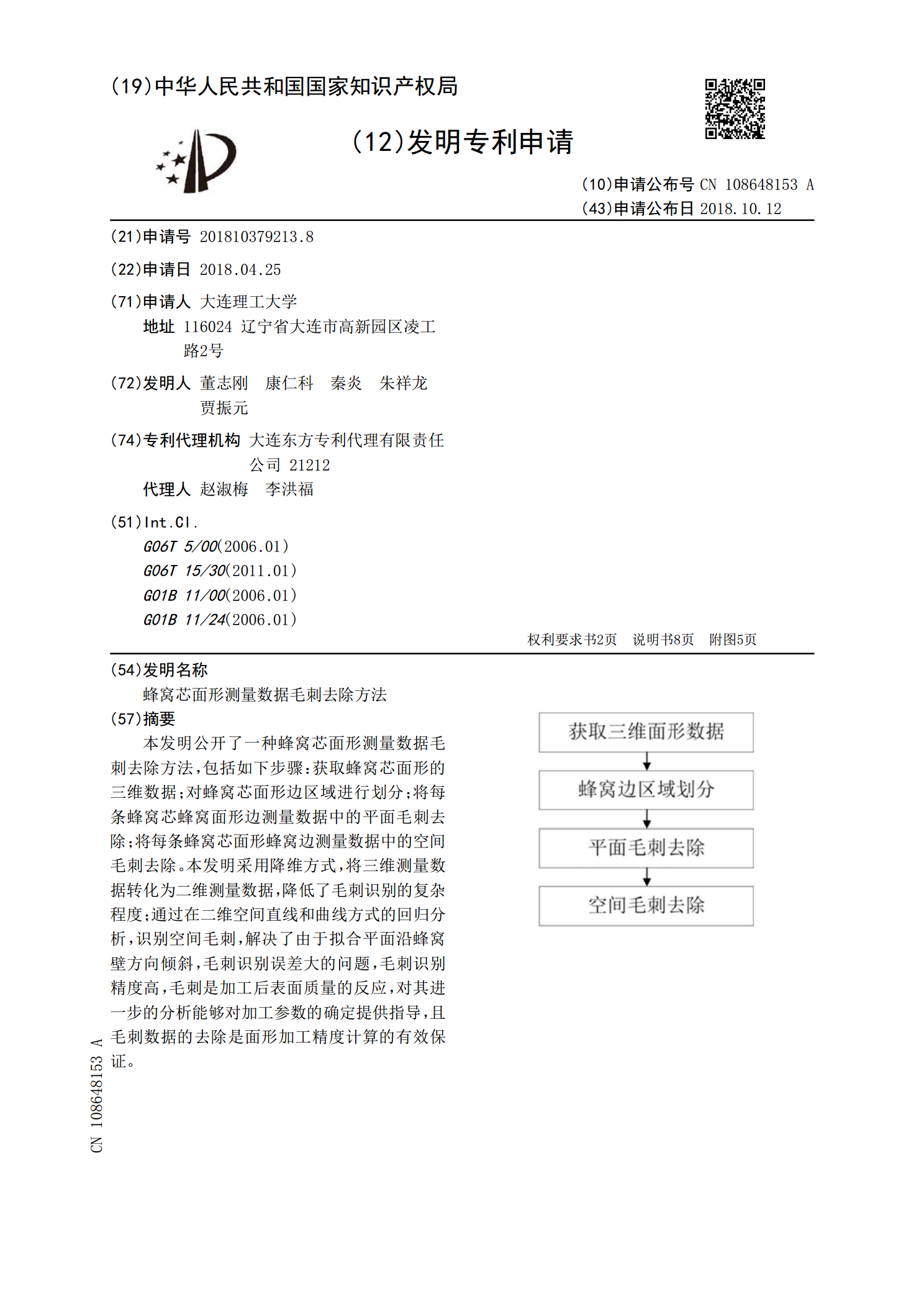
蜂窝芯面形测量数据毛刺去除方法.pdf
本发明公开了一种蜂窝芯面形测量数据毛刺去除方法,包括如下步骤:获取蜂窝芯面形的三维数据;对蜂窝芯面形边区域进行划分;将每条蜂窝芯蜂窝面形边测量数据中的平面毛刺去除;将每条蜂窝芯面形蜂窝边测量数据中的空间毛刺去除。本发明采用降维方式,将三维测量数据转化为二维测量数据,降低了毛刺识别的复杂程度;通过在二维空间直线和曲线方式的回归分析,识别空间毛刺,解决了由于拟合平面沿蜂窝壁方向倾斜,毛刺识别误差大的问题,毛刺识别精度高,毛刺是加工后表面质量的反应,对其进一步的分析能够对加工参数的确定提供指导,且毛刺数据的去除