
蜂窝芯面形测量数据毛刺去除方法.pdf

邻家****ng

1/10
2/10
3/10
4/10
5/10
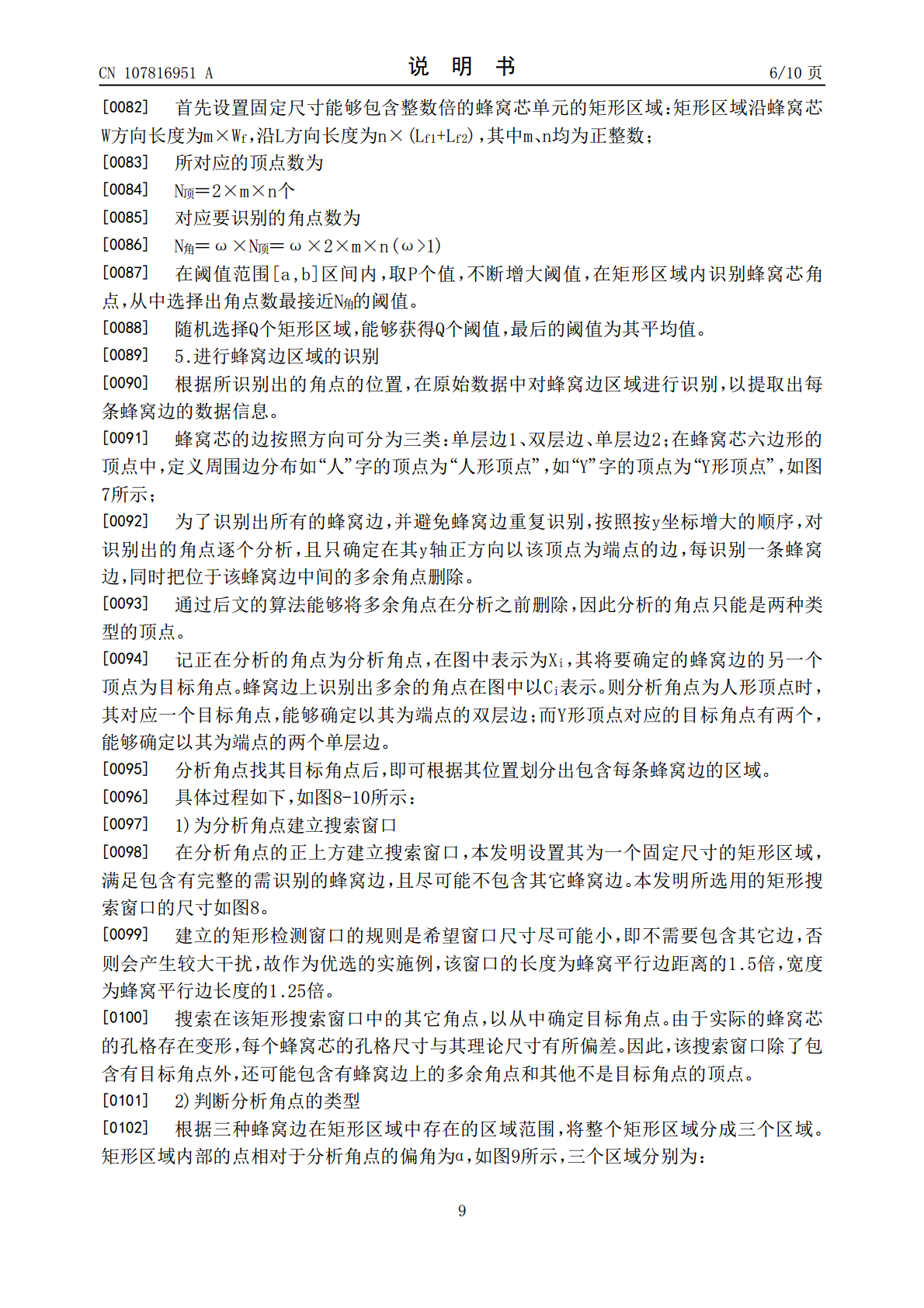
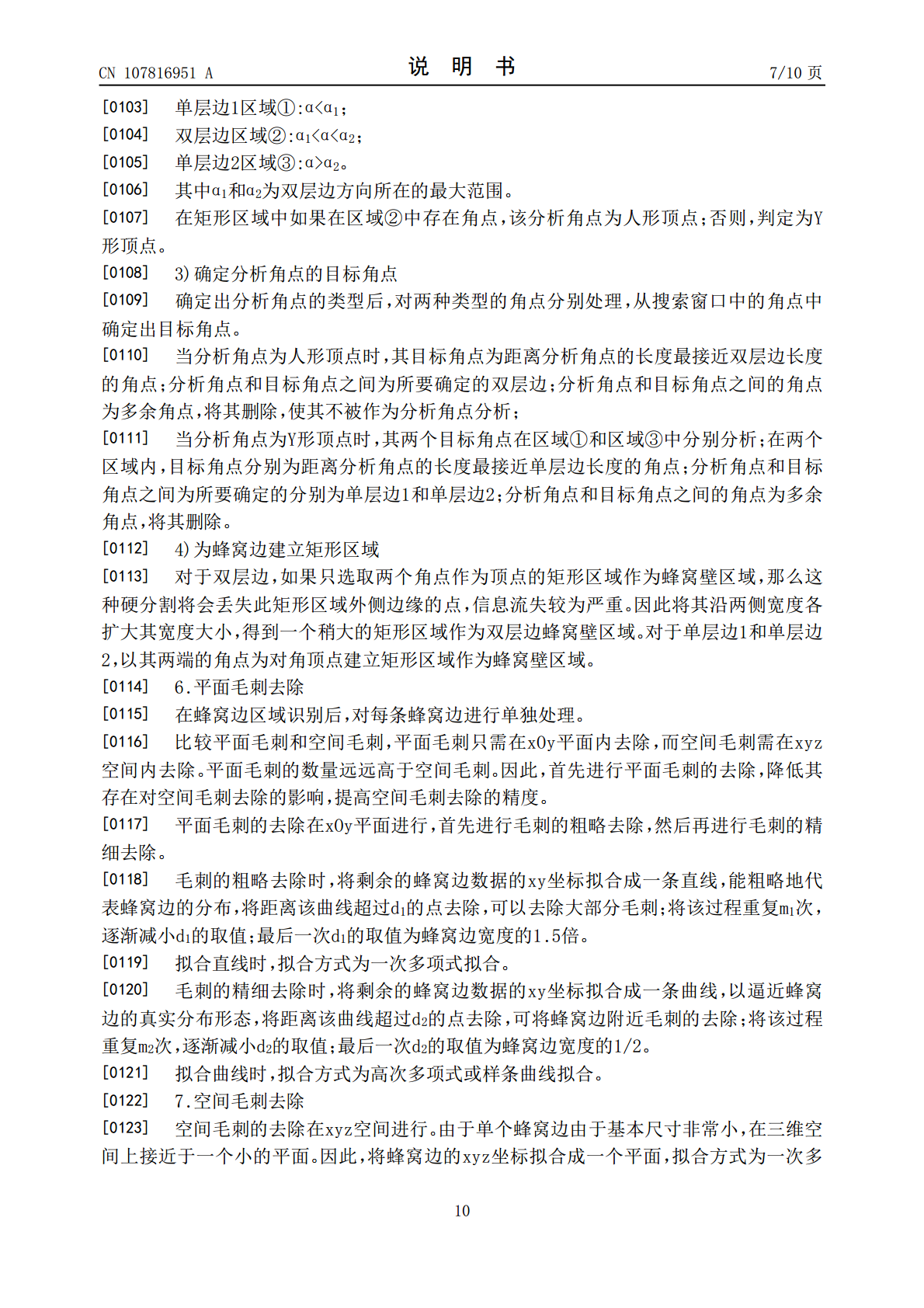
6/10
7/10
8/10
9/10
10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
蜂窝芯面形测量数据毛刺去除方法.pdf
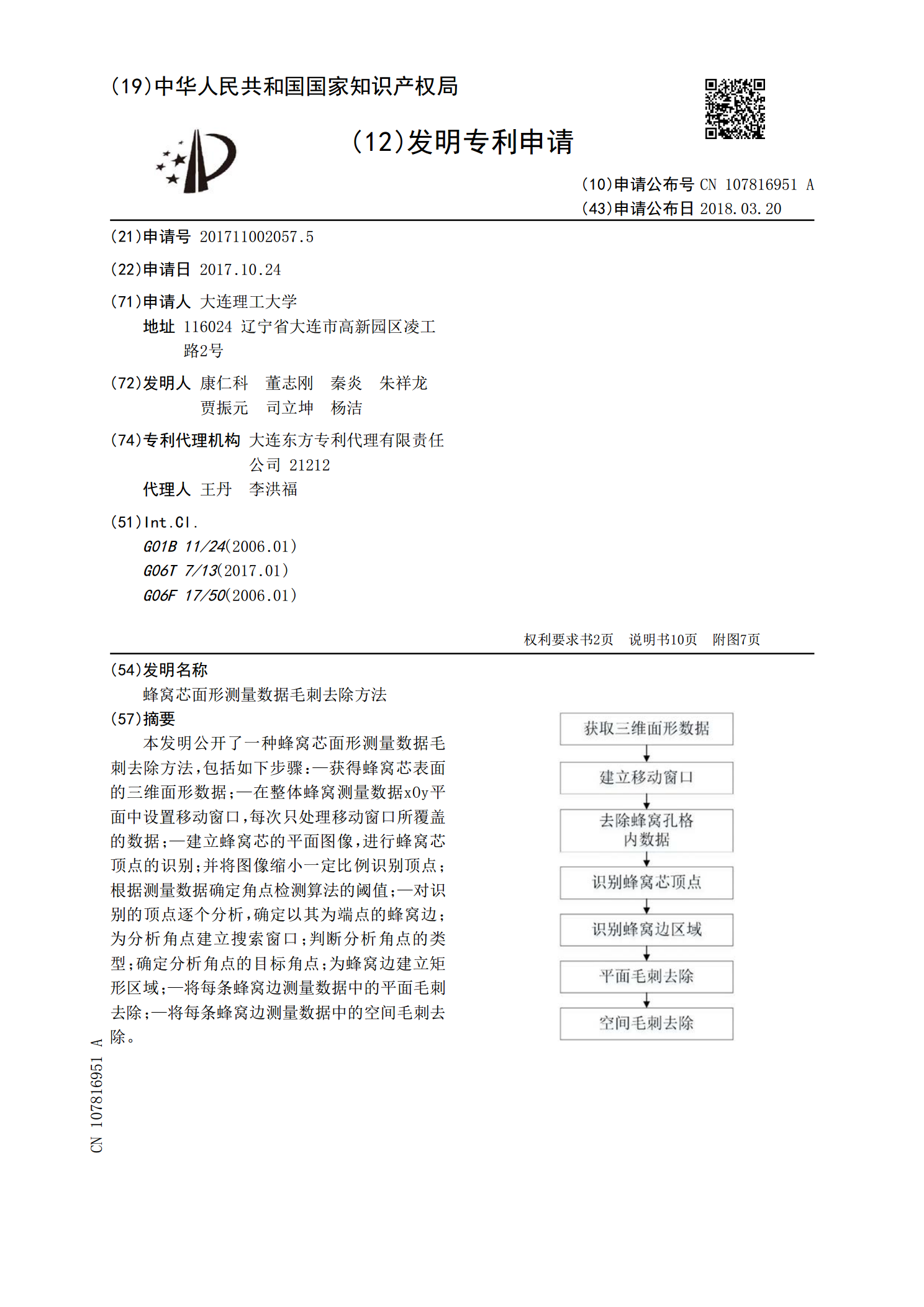
本发明公开了一种蜂窝芯面形测量数据毛刺去除方法,包括如下步骤:—获得蜂窝芯表面的三维面形数据;—在整体蜂窝测量数据xOy平面中设置移动窗口,每次只处理移动窗口所覆盖的数据;—建立蜂窝芯的平面图像,进行蜂窝芯顶点的识别;并将图像缩小一定比例识别顶点;根据测量数据确定角点检测算法的阈值;—对识别的顶点逐个分析,确定以其为端点的蜂窝边;为分析角点建立搜索窗口;判断分析角点的类型;确定分析角点的目标角点;为蜂窝边建立矩形区域;—将每条蜂窝边测量数据中的平面毛刺去除;—将每条蜂窝边测量数据中的空间毛刺去除。
蜂窝芯面形测量数据毛刺去除方法.pdf
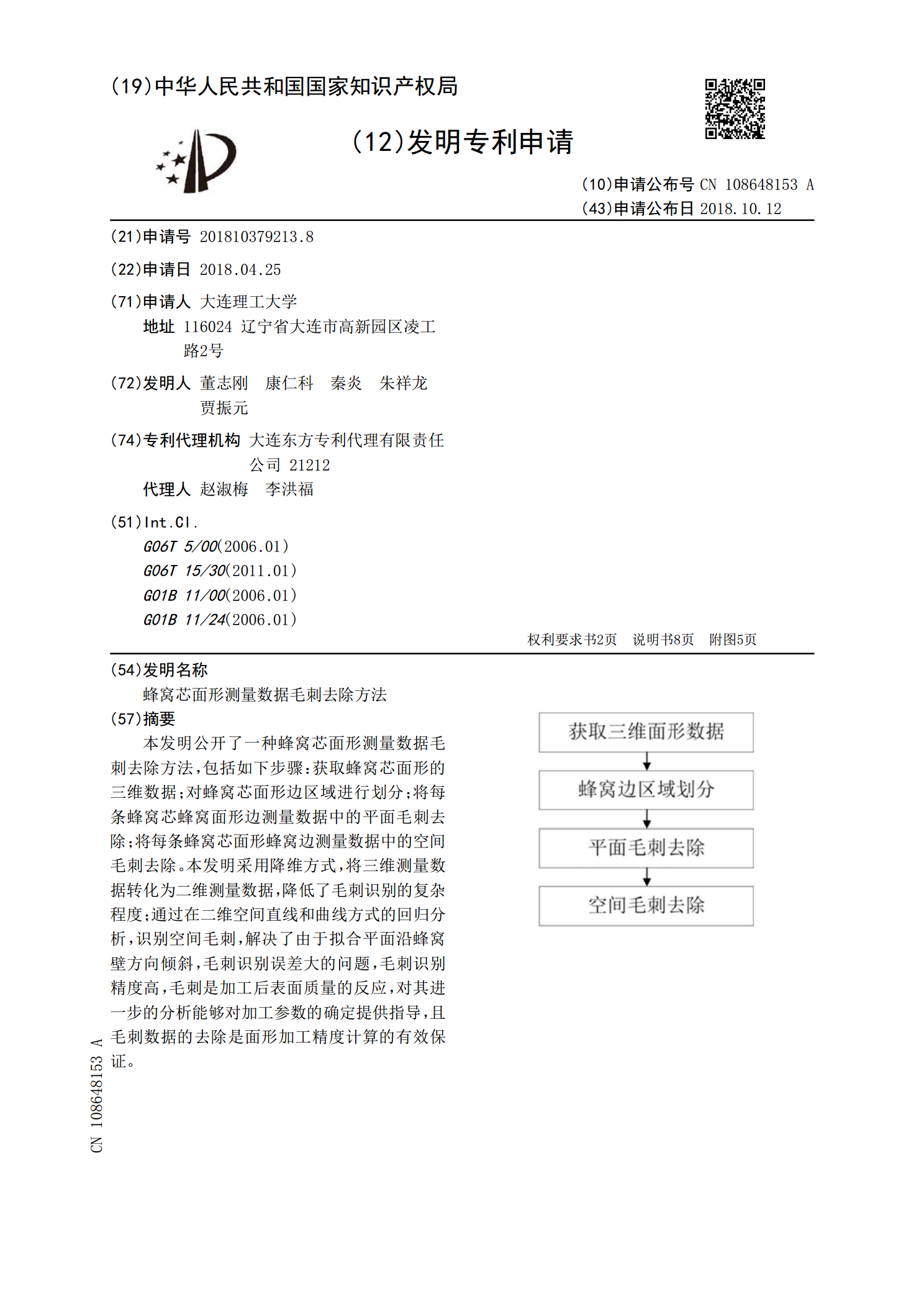
本发明公开了一种蜂窝芯面形测量数据毛刺去除方法,包括如下步骤:获取蜂窝芯面形的三维数据;对蜂窝芯面形边区域进行划分;将每条蜂窝芯蜂窝面形边测量数据中的平面毛刺去除;将每条蜂窝芯面形蜂窝边测量数据中的空间毛刺去除。本发明采用降维方式,将三维测量数据转化为二维测量数据,降低了毛刺识别的复杂程度;通过在二维空间直线和曲线方式的回归分析,识别空间毛刺,解决了由于拟合平面沿蜂窝壁方向倾斜,毛刺识别误差大的问题,毛刺识别精度高,毛刺是加工后表面质量的反应,对其进一步的分析能够对加工参数的确定提供指导,且毛刺数据的去除
一种蜂窝芯面形的测量方法.pdf
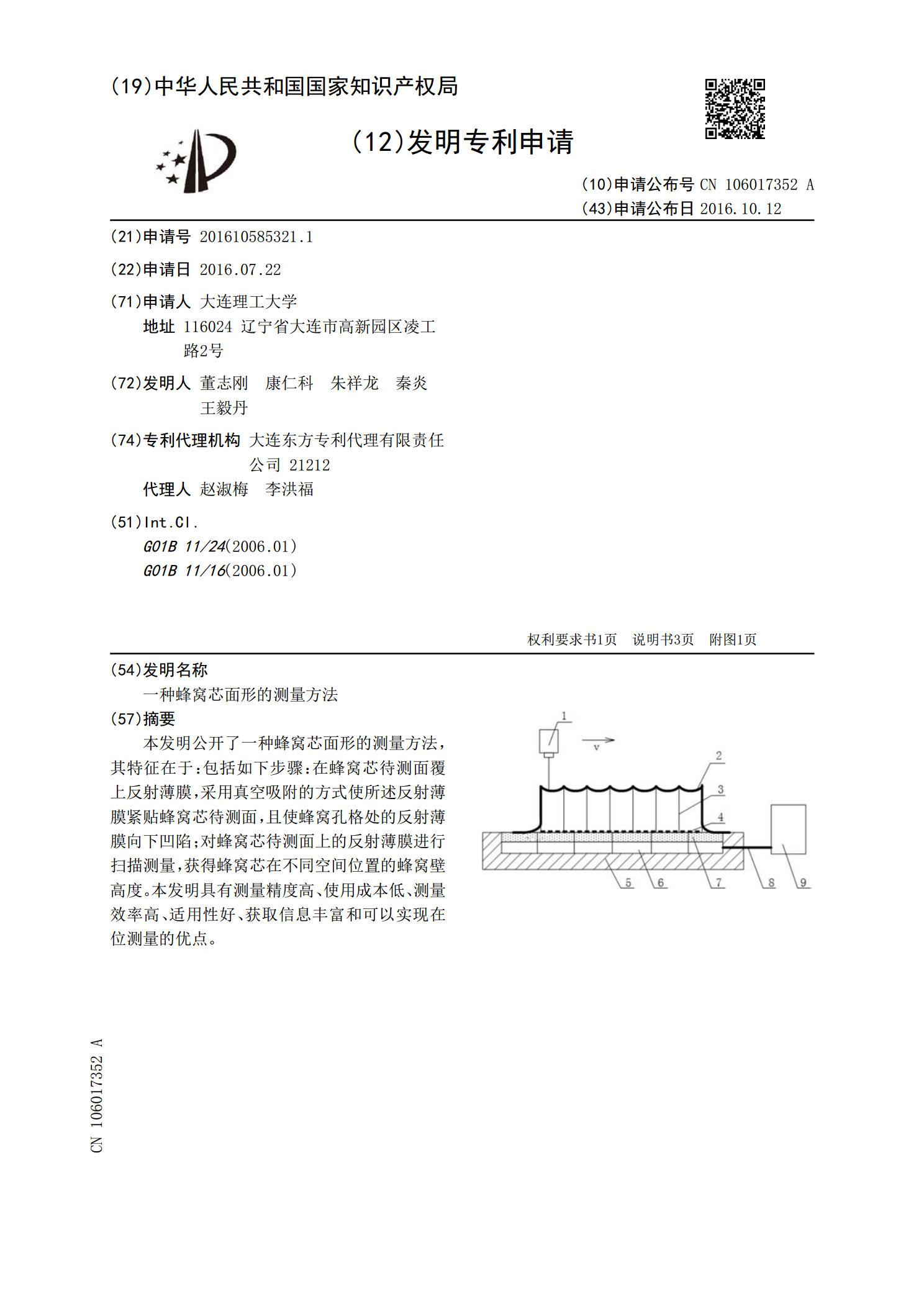
本发明公开了一种蜂窝芯面形的测量方法,其特征在于:包括如下步骤:在蜂窝芯待测面覆上反射薄膜,采用真空吸附的方式使所述反射薄膜紧贴蜂窝芯待测面,且使蜂窝孔格处的反射薄膜向下凹陷;对蜂窝芯待测面上的反射薄膜进行扫描测量,获得蜂窝芯在不同空间位置的蜂窝壁高度。本发明具有测量精度高、使用成本低、测量效率高、适用性好、获取信息丰富和可以实现在位测量的优点。

一种蜂窝芯面形测量装置.pdf
本发明公开了一种蜂窝芯面形测量装置,包括:激光测量传感器、测量运动系统、反射膜真空吸附系统、反射膜铺放系统、控制所述测量运动系统的运动控制系统和处理所述激光测量传感器测量的数据的数据处理系统,由所述反射膜铺放系统在蜂窝芯待测面覆上反射薄膜,由所述反射膜真空吸附系统对反射膜进行真空吸附,使所述反射薄膜紧贴蜂窝芯待测面,且使蜂窝孔格处的反射薄膜向下凹陷;通过运动控制系统控制安装在测量运动系统中的激光测量传感器,对蜂窝芯进行三维扫描,获得蜂窝芯在不同空间位置的蜂窝壁高度,再由数据处理系统获得蜂窝芯的面形。本发明
一种从蜂窝芯表面测量数据中识别蜂窝边的方法.pdf
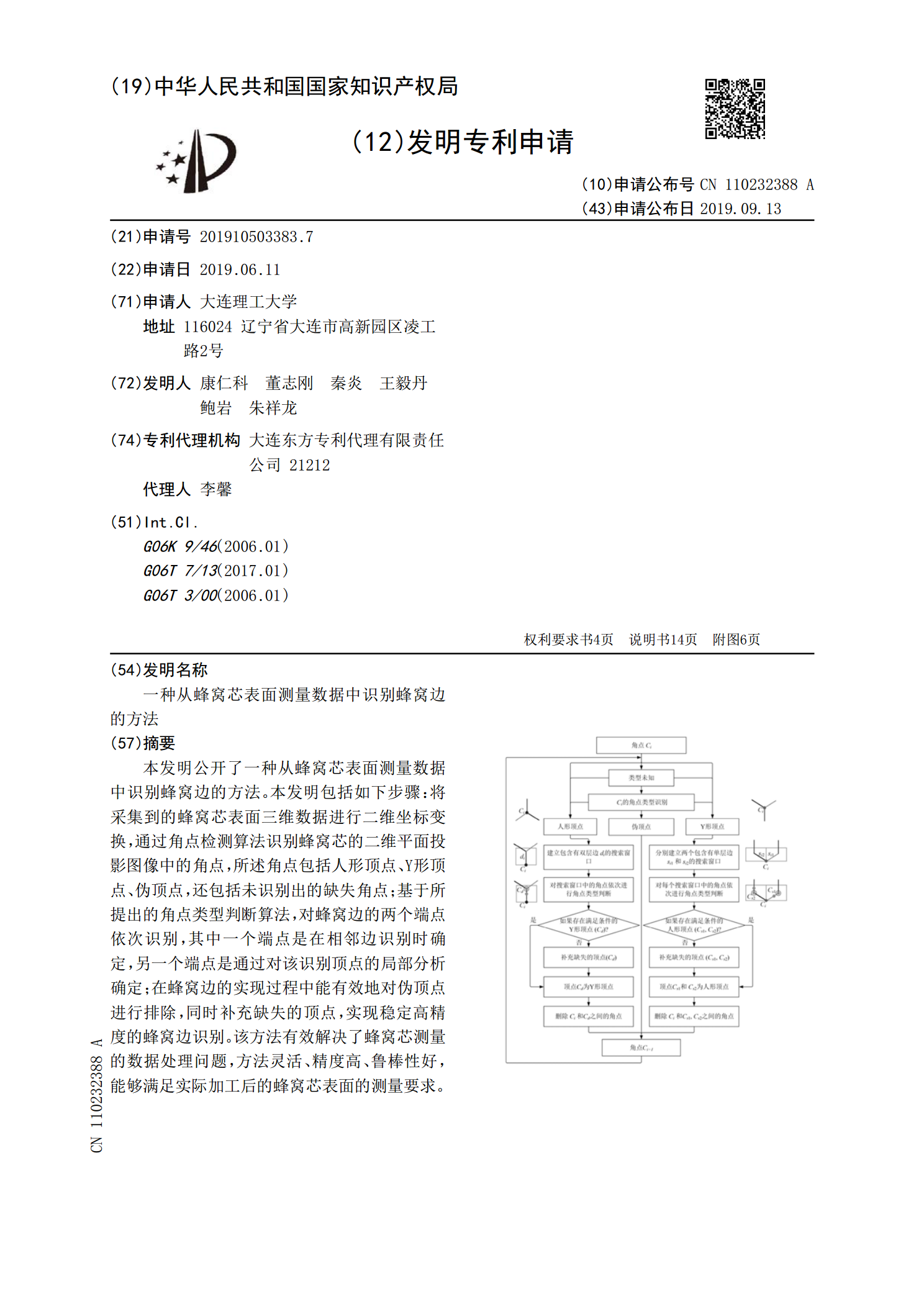
本发明公开了一种从蜂窝芯表面测量数据中识别蜂窝边的方法。本发明包括如下步骤:将采集到的蜂窝芯表面三维数据进行二维坐标变换,通过角点检测算法识别蜂窝芯的二维平面投影图像中的角点,所述角点包括人形顶点、Y形顶点、伪顶点,还包括未识别出的缺失角点;基于所提出的角点类型判断算法,对蜂窝边的两个端点依次识别,其中一个端点是在相邻边识别时确定,另一个端点是通过对该识别顶点的局部分析确定;在蜂窝边的实现过程中能有效地对伪顶点进行排除,同时补充缺失的顶点,实现稳定高精度的蜂窝边识别。该方法有效解决了蜂窝芯测量的数据处理问