
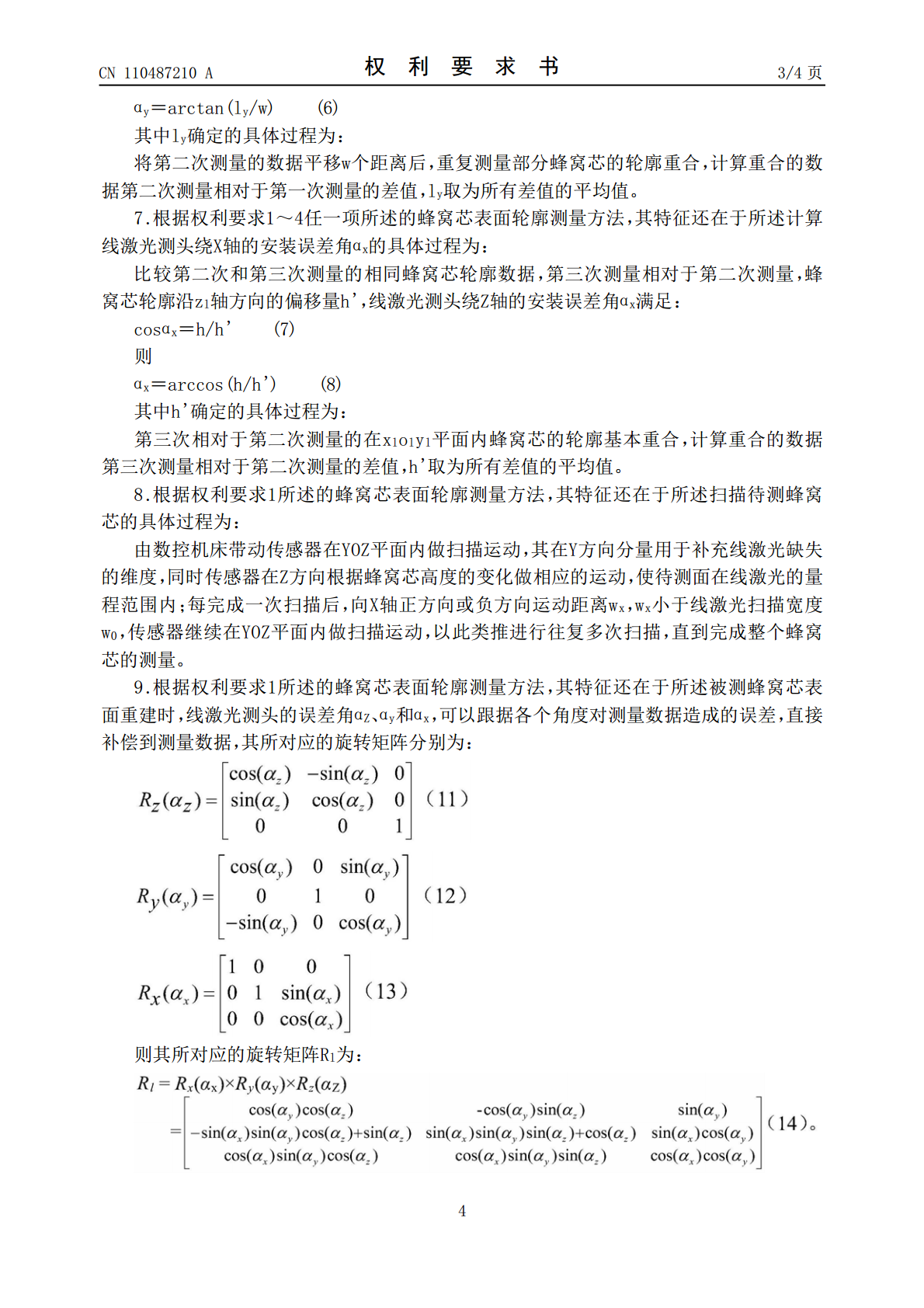
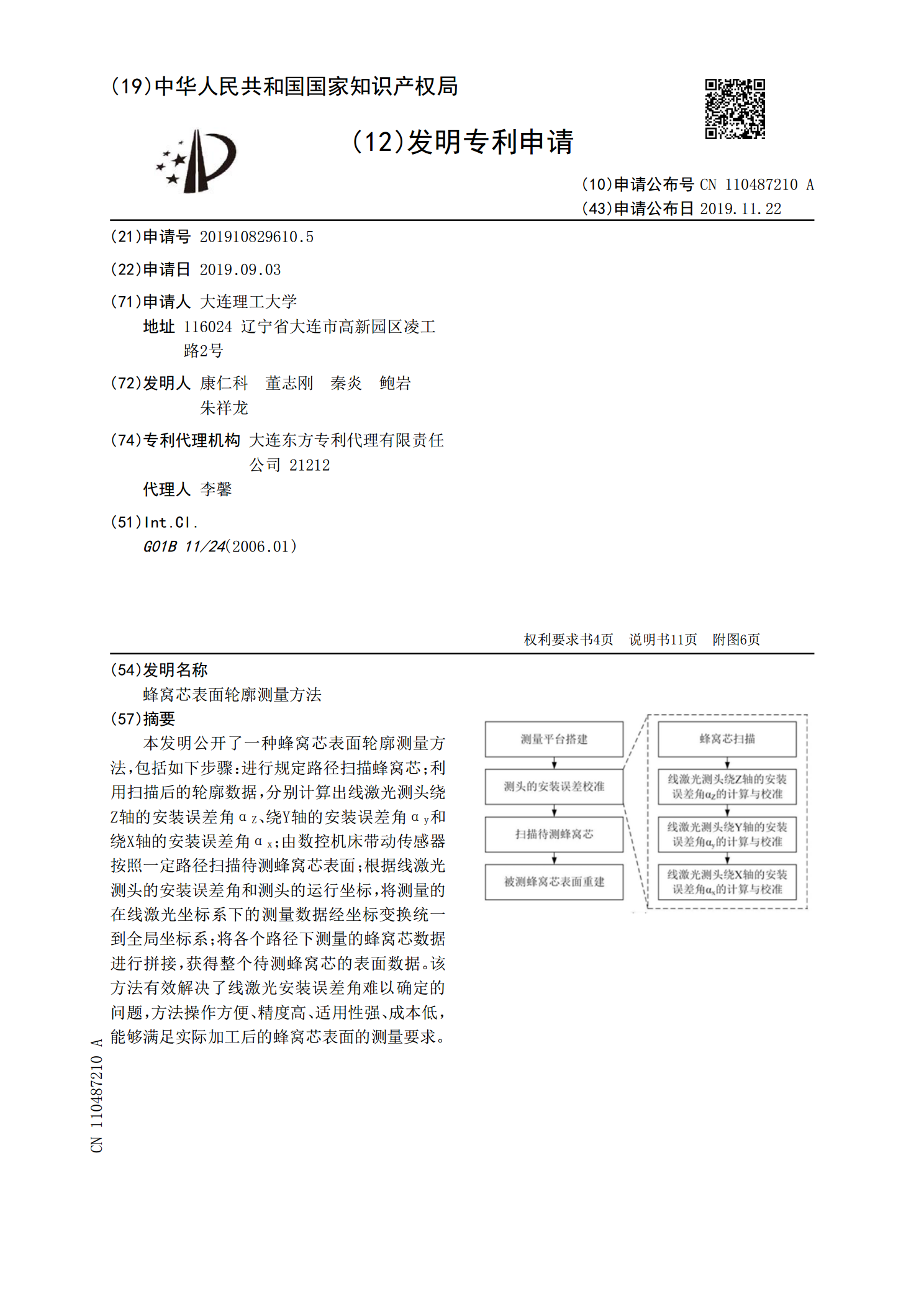
蜂窝芯表面轮廓测量方法.pdf

是你****岺呀


1/10

2/10

3/10
4/10

5/10

6/10

7/10
8/10

9/10
10/10
亲,该文档总共22页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
蜂窝芯表面轮廓测量方法.pdf
本发明公开了一种蜂窝芯表面轮廓测量方法,包括如下步骤:进行规定路径扫描蜂窝芯;利用扫描后的轮廓数据,分别计算出线激光测头绕Z轴的安装误差角α
表面曲率突变光学轮廓测量方法.pdf
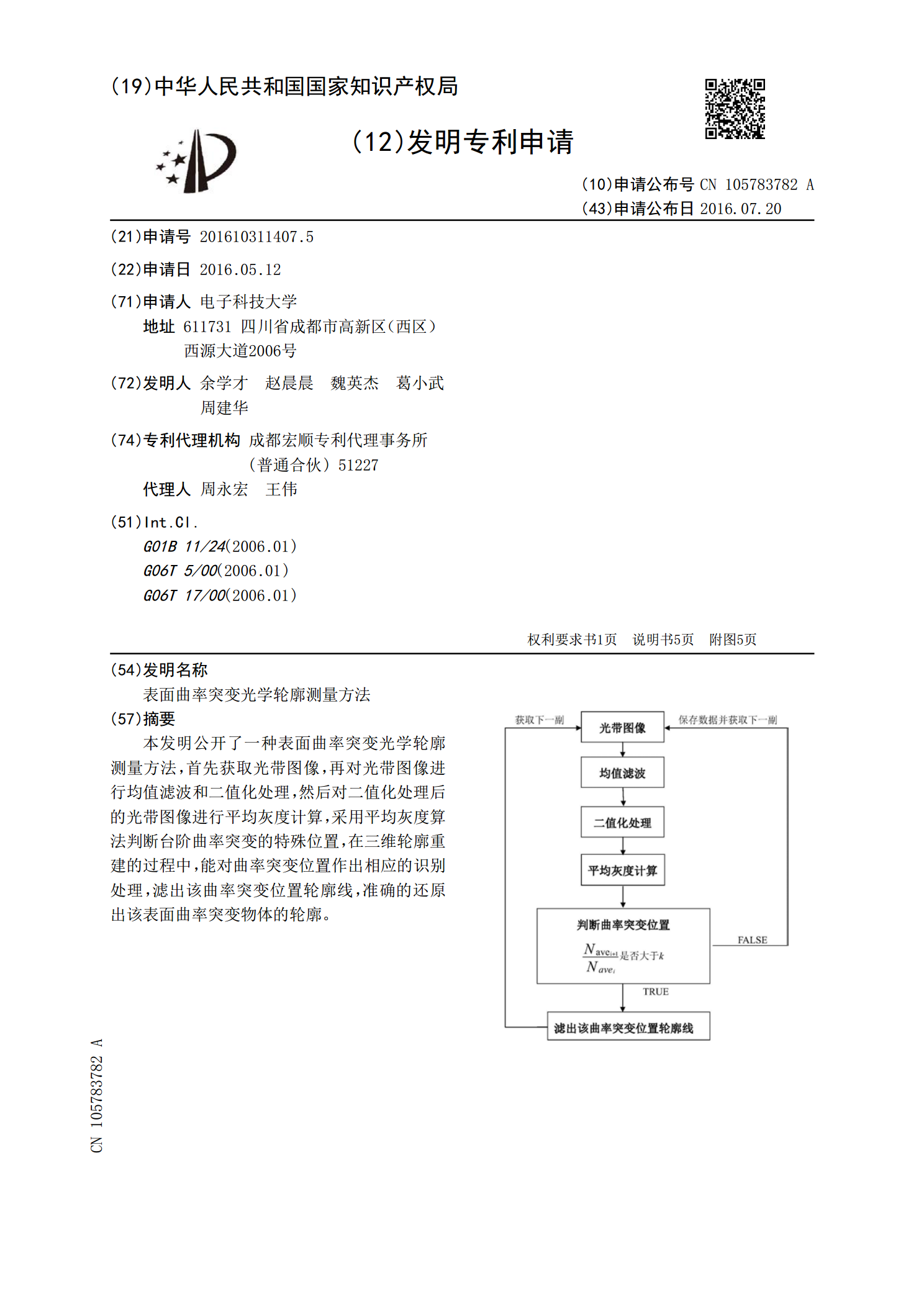
本发明公开了一种表面曲率突变光学轮廓测量方法,首先获取光带图像,再对光带图像进行均值滤波和二值化处理,然后对二值化处理后的光带图像进行平均灰度计算,采用平均灰度算法判断台阶曲率突变的特殊位置,在三维轮廓重建的过程中,能对曲率突变位置作出相应的识别处理,滤出该曲率突变位置轮廓线,准确的还原出该表面曲率突变物体的轮廓。
一种蜂窝芯面形的测量方法.pdf
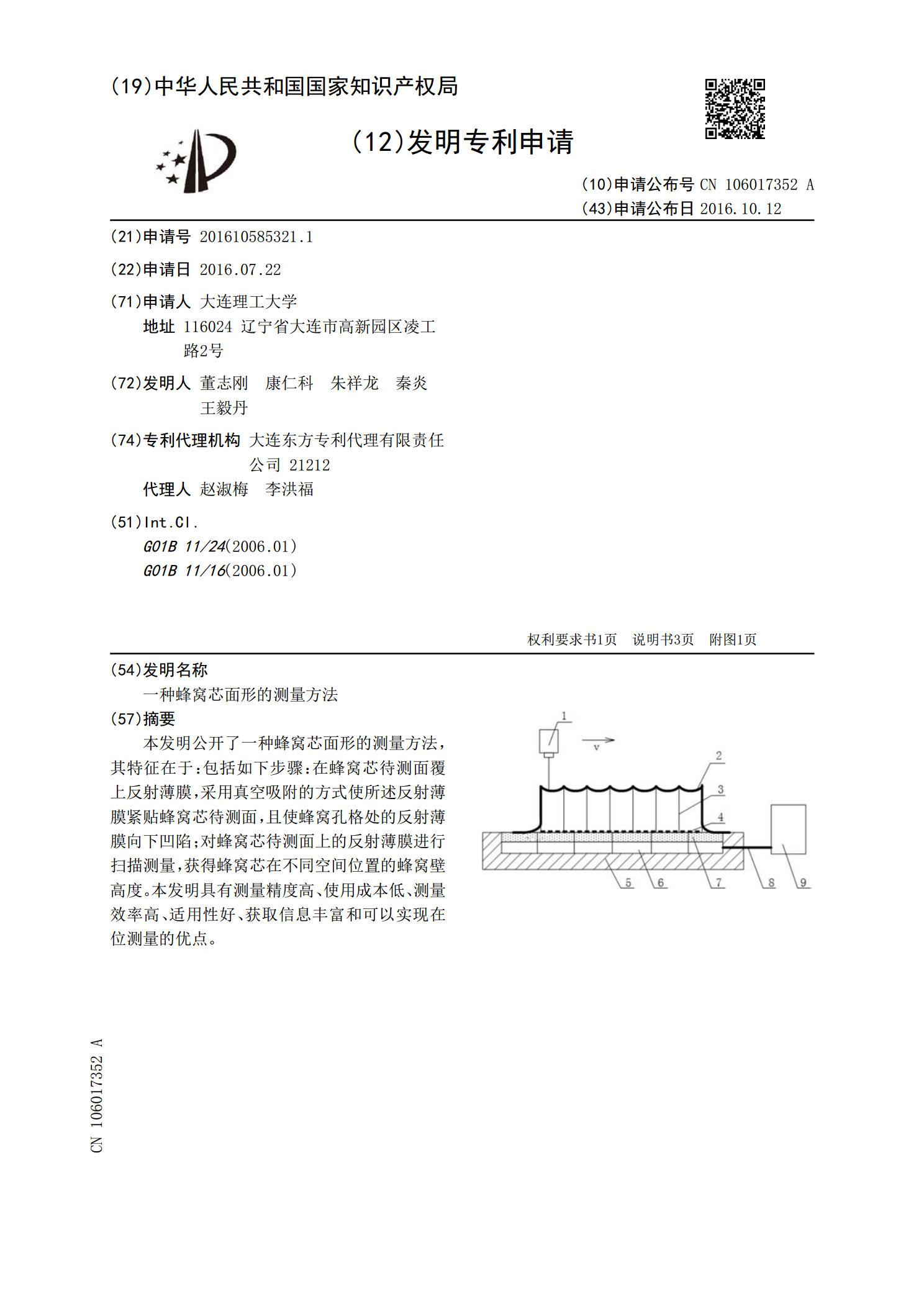
本发明公开了一种蜂窝芯面形的测量方法,其特征在于:包括如下步骤:在蜂窝芯待测面覆上反射薄膜,采用真空吸附的方式使所述反射薄膜紧贴蜂窝芯待测面,且使蜂窝孔格处的反射薄膜向下凹陷;对蜂窝芯待测面上的反射薄膜进行扫描测量,获得蜂窝芯在不同空间位置的蜂窝壁高度。本发明具有测量精度高、使用成本低、测量效率高、适用性好、获取信息丰富和可以实现在位测量的优点。

一种线白光表面轮廓测量方法.pdf
本发明涉及一种线白光表面轮廓测量方法,在成像光路中设置狭缝光阑,透过狭缝只有一个长方形的光条照射到被测样本上,在狭缝光阑作用下CCD摄像机拍摄到的图像仅有中间一个长方形白带,其他部分为黑色。当测量系统测量时产生的干涉图像被狭缝光阑截断,在长方形白带上只有部分干涉条纹,测量不同高度的被测物时,长方形白带上的干涉条纹随着不同的被测高度发生横向平移,通过对视野内的长方形白带进行测量,将沿着长方形白带的中点视为参考点,干涉条纹的相干峰在长方形白带中的横向移动量表现为垂直方向的高度,并配合外部轴系位移平台实现表面轮
一种蜂窝芯结构件轮廓边缘切边方法.pdf
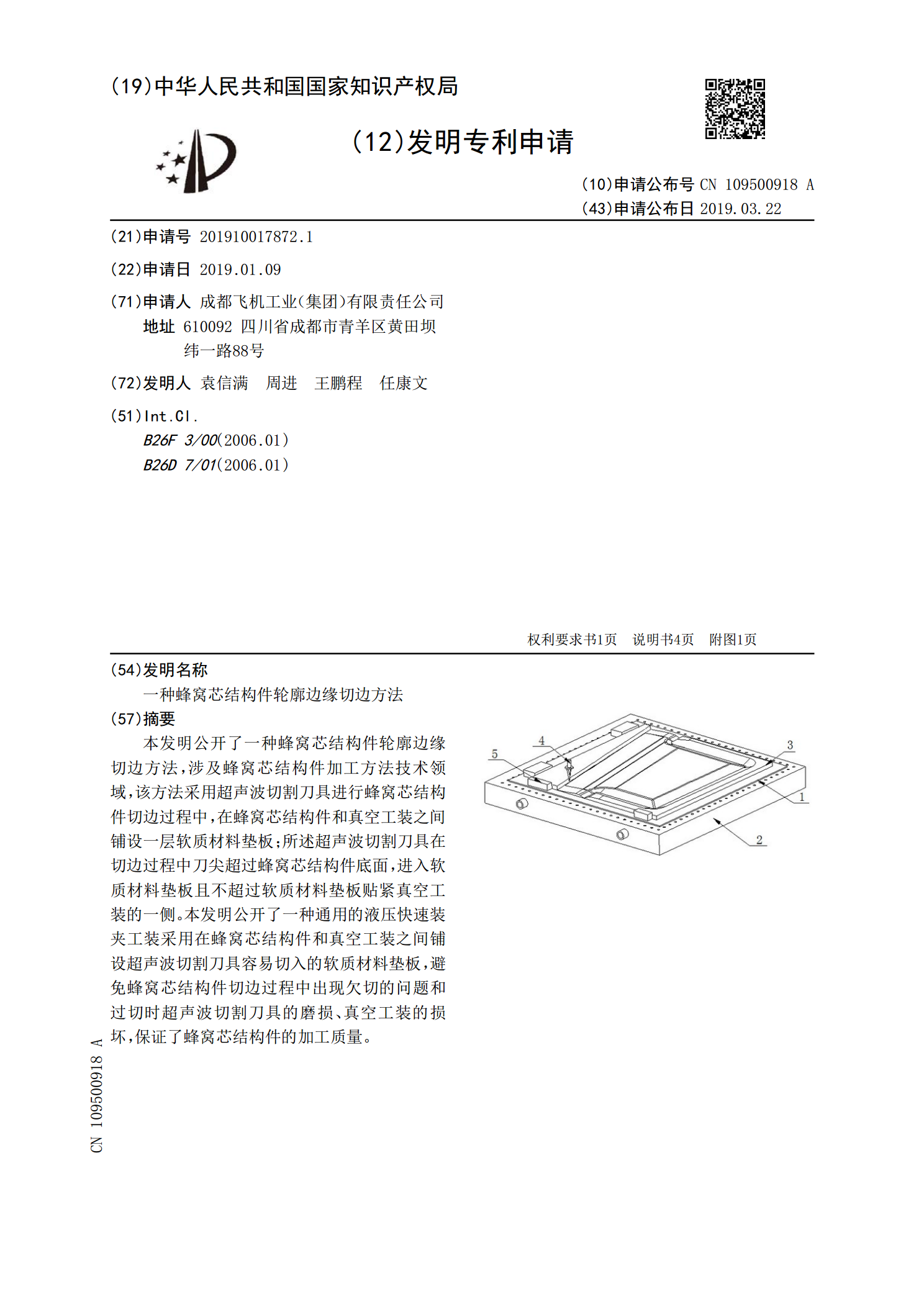
本发明公开了一种蜂窝芯结构件轮廓边缘切边方法,涉及蜂窝芯结构件加工方法技术领域,该方法采用超声波切割刀具进行蜂窝芯结构件切边过程中,在蜂窝芯结构件和真空工装之间铺设一层软质材料垫板;所述超声波切割刀具在切边过程中刀尖超过蜂窝芯结构件底面,进入软质材料垫板且不超过软质材料垫板贴紧真空工装的一侧。本发明公开了一种通用的液压快速装夹工装采用在蜂窝芯结构件和真空工装之间铺设超声波切割刀具容易切入的软质材料垫板,避免蜂窝芯结构件切边过程中出现欠切的问题和过切时超声波切割刀具的磨损、真空工装的损坏,保证了蜂窝芯结构件