
一种六轴机械臂的腕部.pdf

如灵****姐姐

1/10
2/10
3/10

4/10

5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种六轴机械臂的腕部.pdf
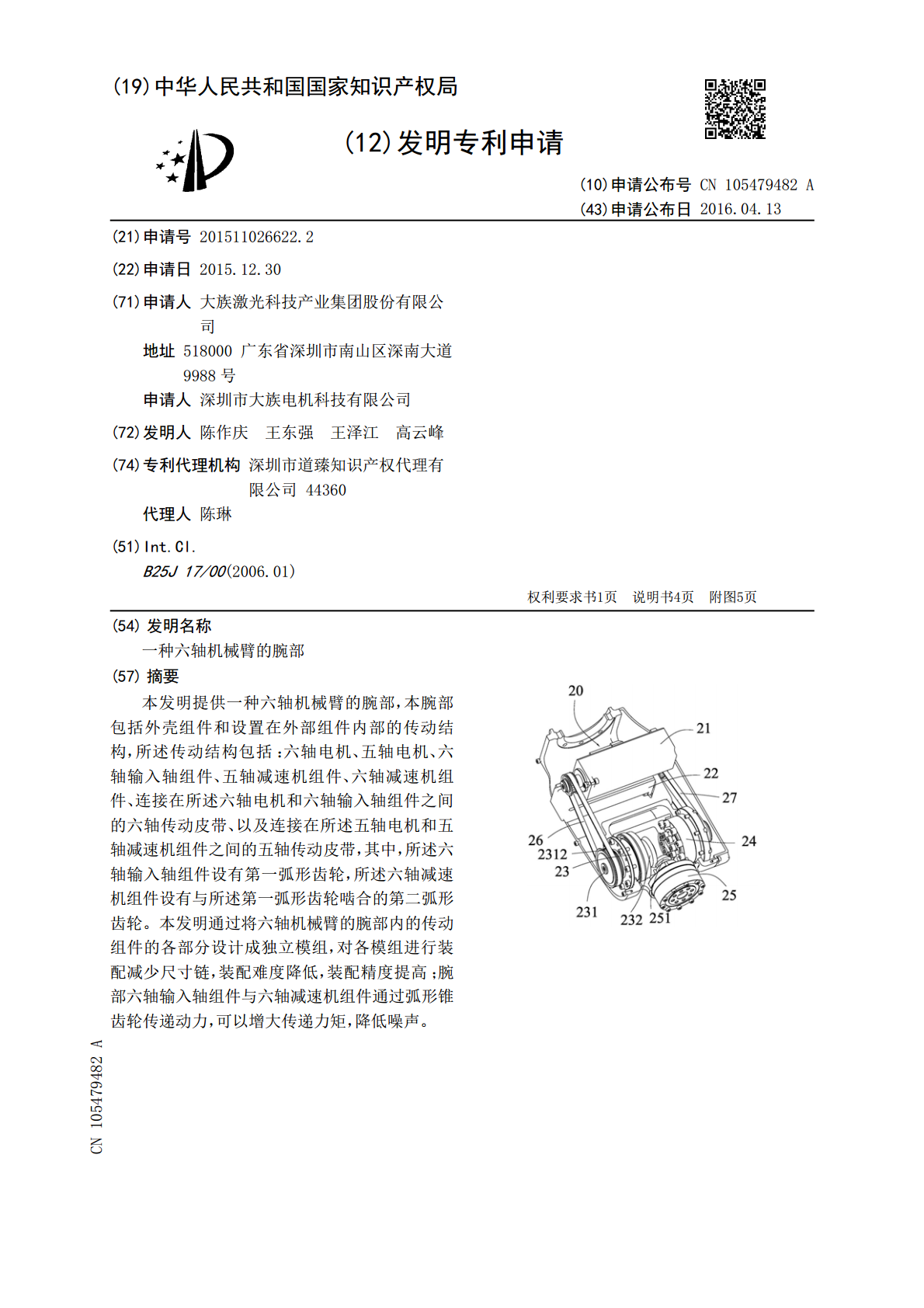
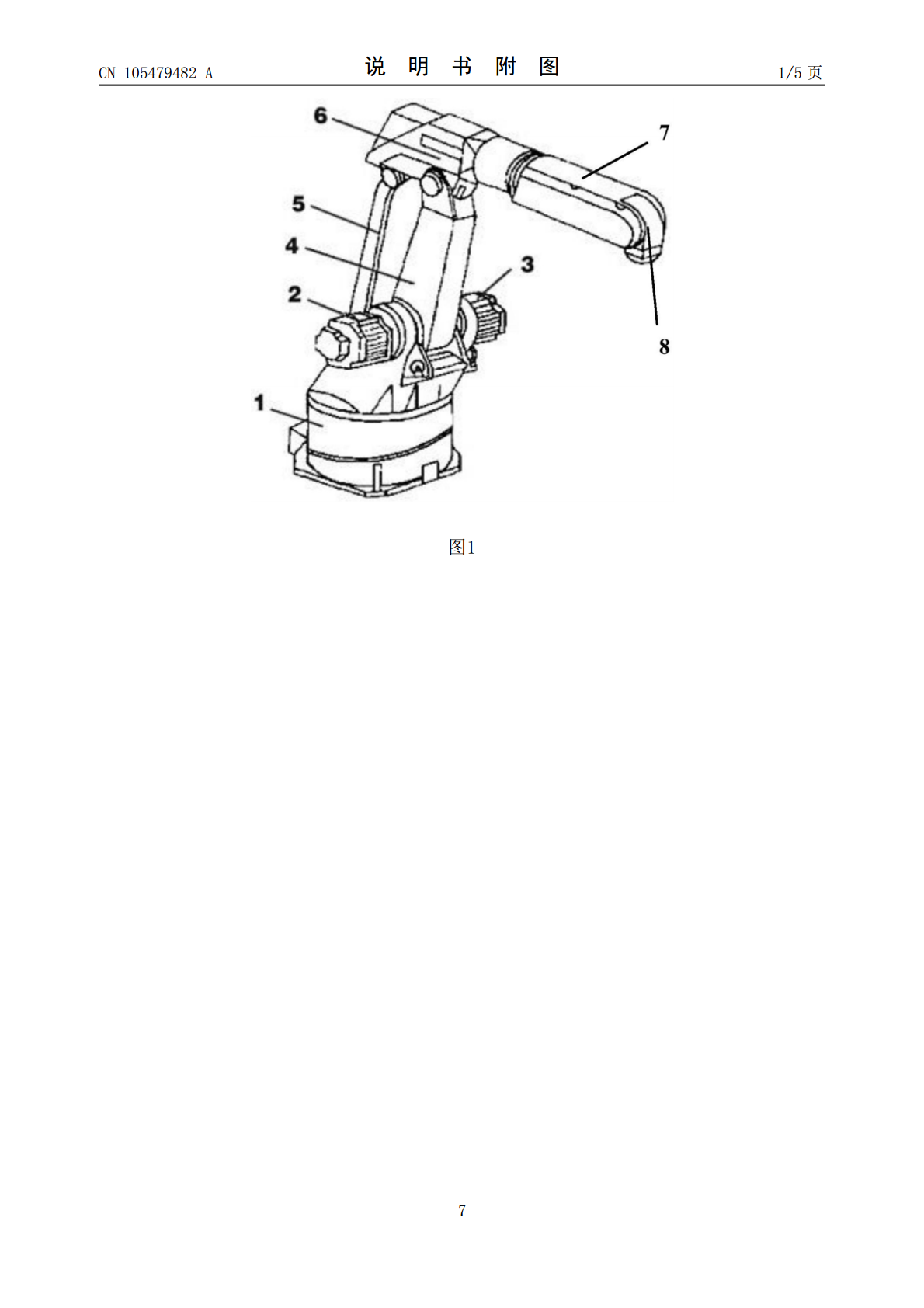
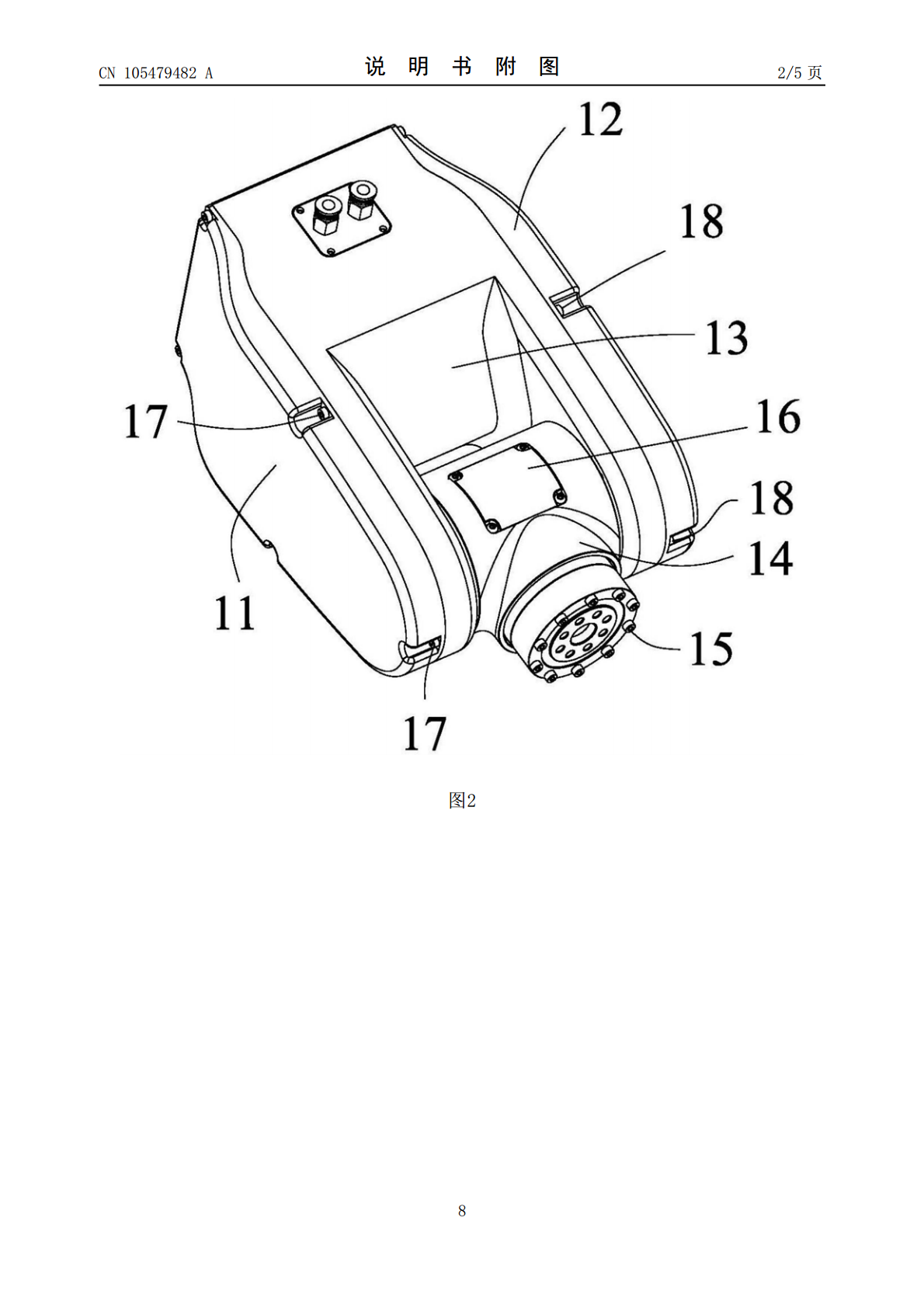
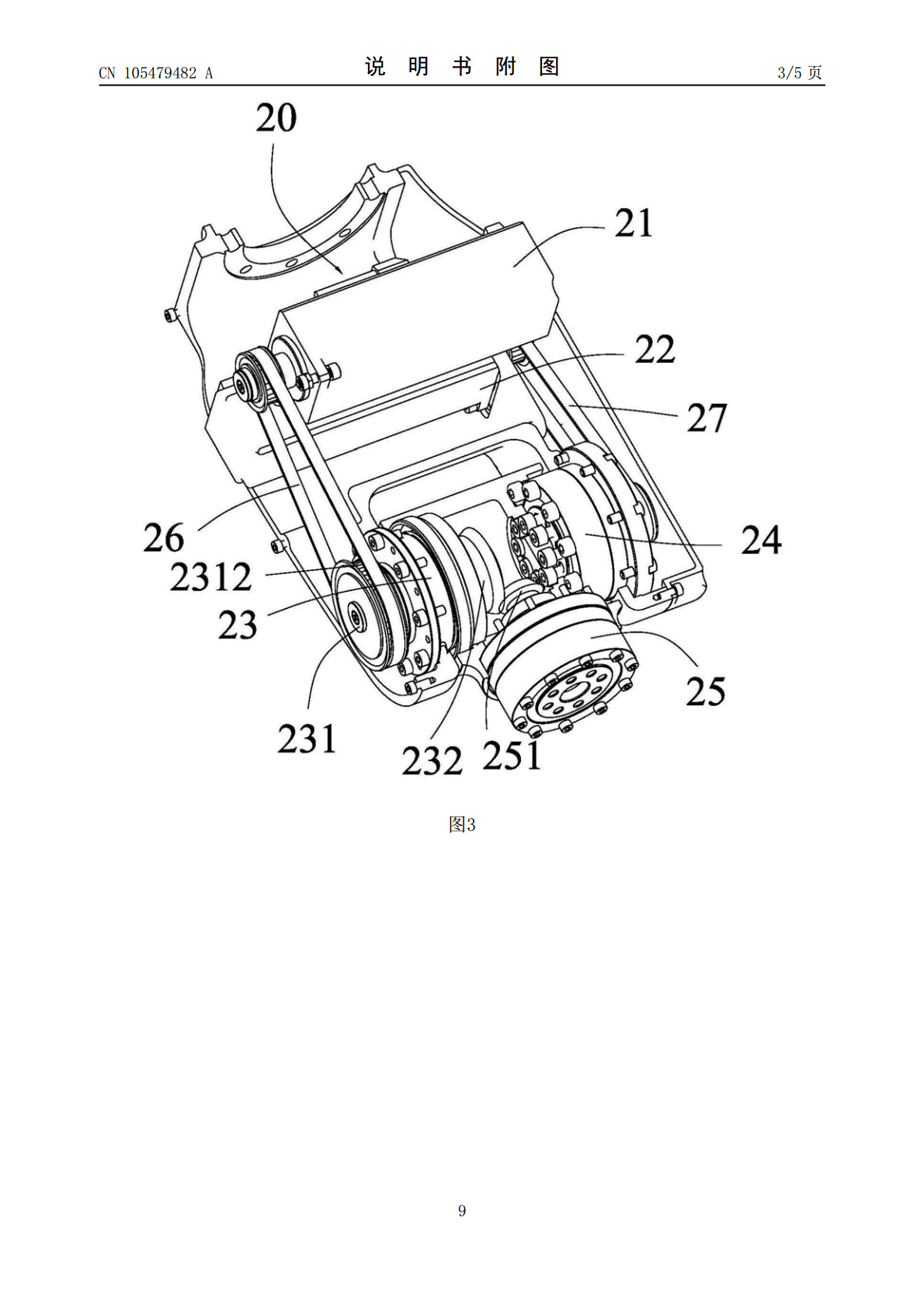
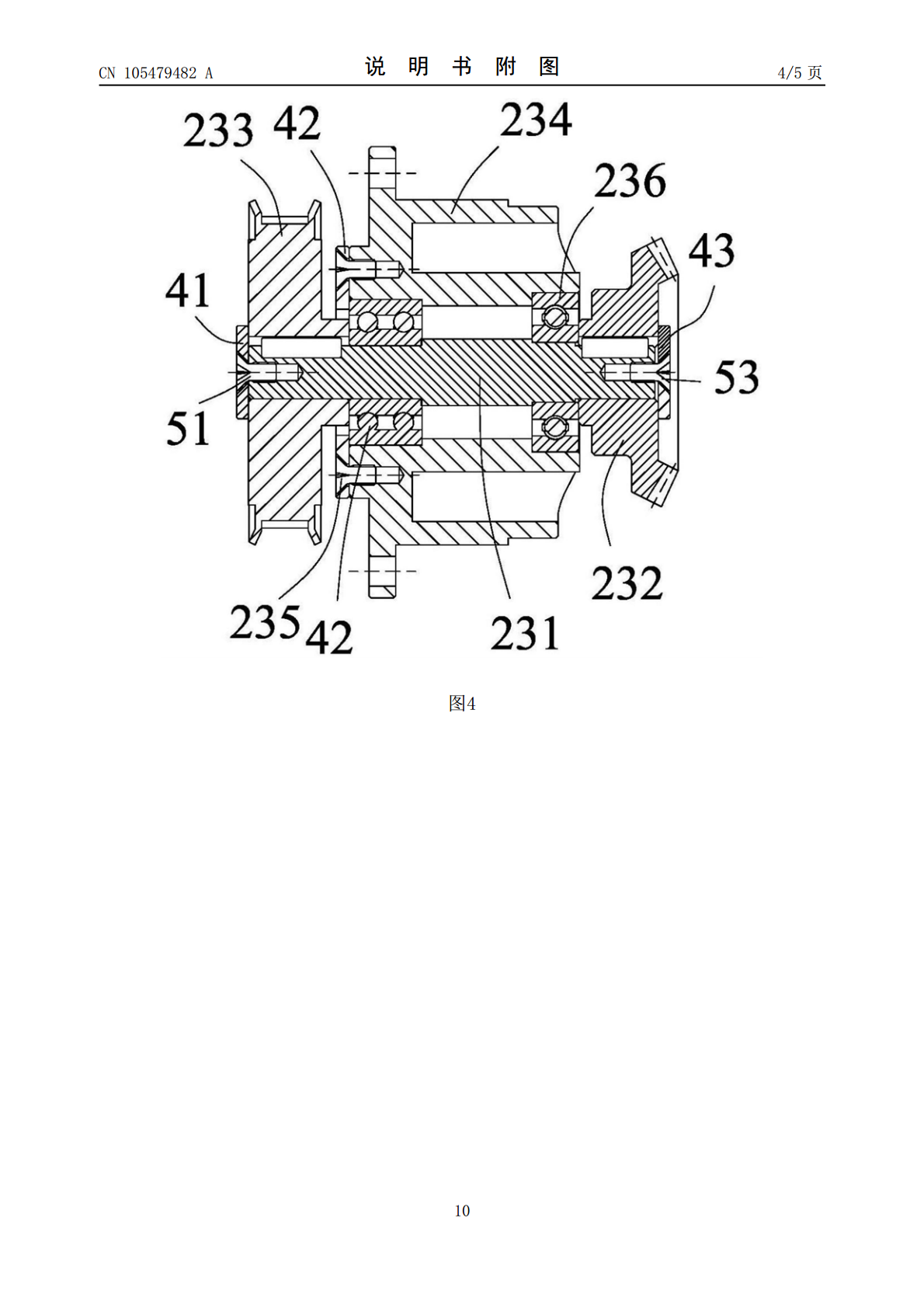
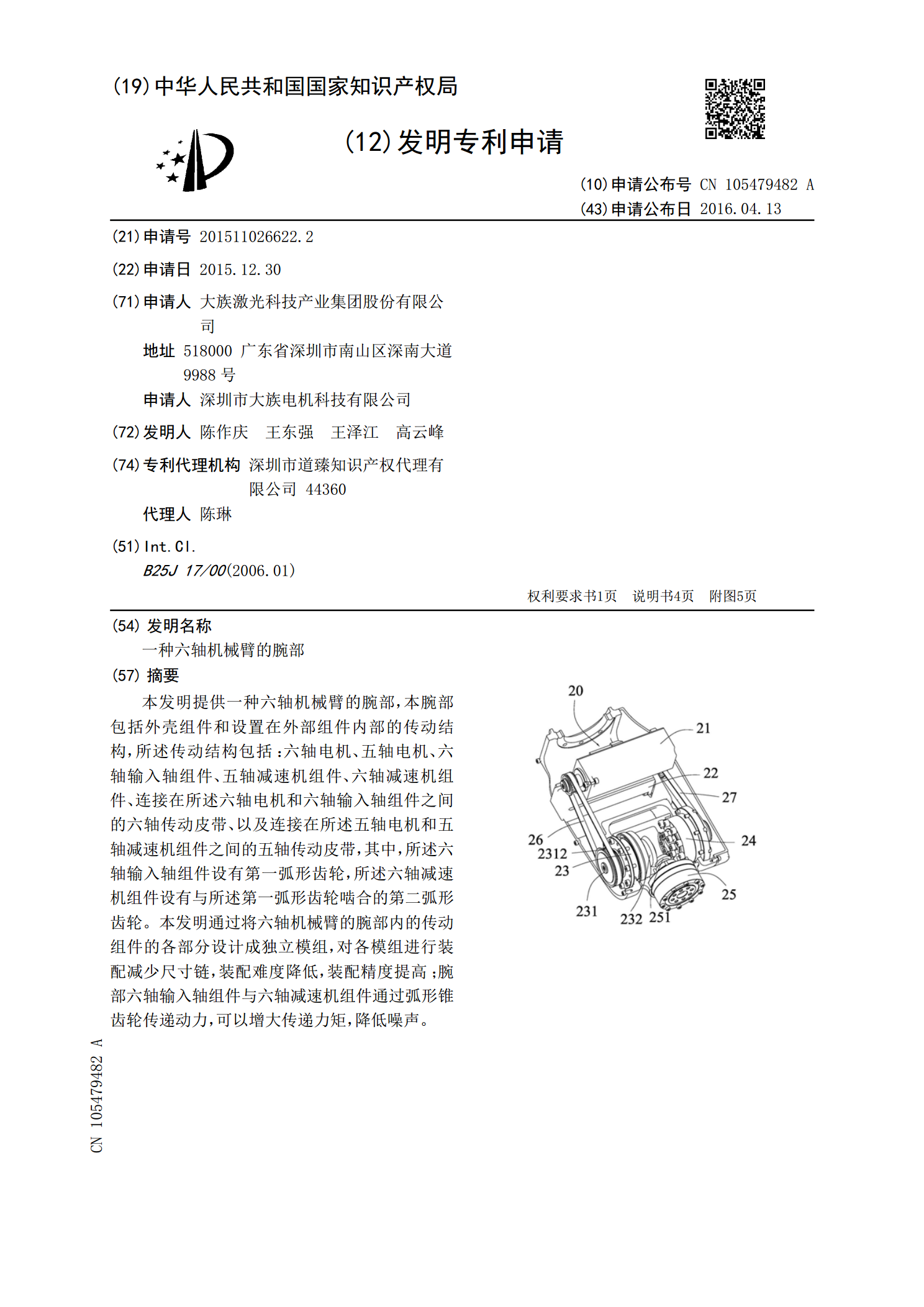
本发明提供一种六轴机械臂的腕部,本腕部包括外壳组件和设置在外部组件内部的传动结构,所述传动结构包括:六轴电机、五轴电机、六轴输入轴组件、五轴减速机组件、六轴减速机组件、连接在所述六轴电机和六轴输入轴组件之间的六轴传动皮带、以及连接在所述五轴电机和五轴减速机组件之间的五轴传动皮带,其中,所述六轴输入轴组件设有第一弧形齿轮,所述六轴减速机组件设有与所述第一弧形齿轮啮合的第二弧形齿轮。本发明通过将六轴机械臂的腕部内的传动组件的各部分设计成独立模组,对各模组进行装配减少尺寸链,装配难度降低,装配精度提高;腕部六轴
一种六轴机械臂的腕部电机齿轮箱.pdf
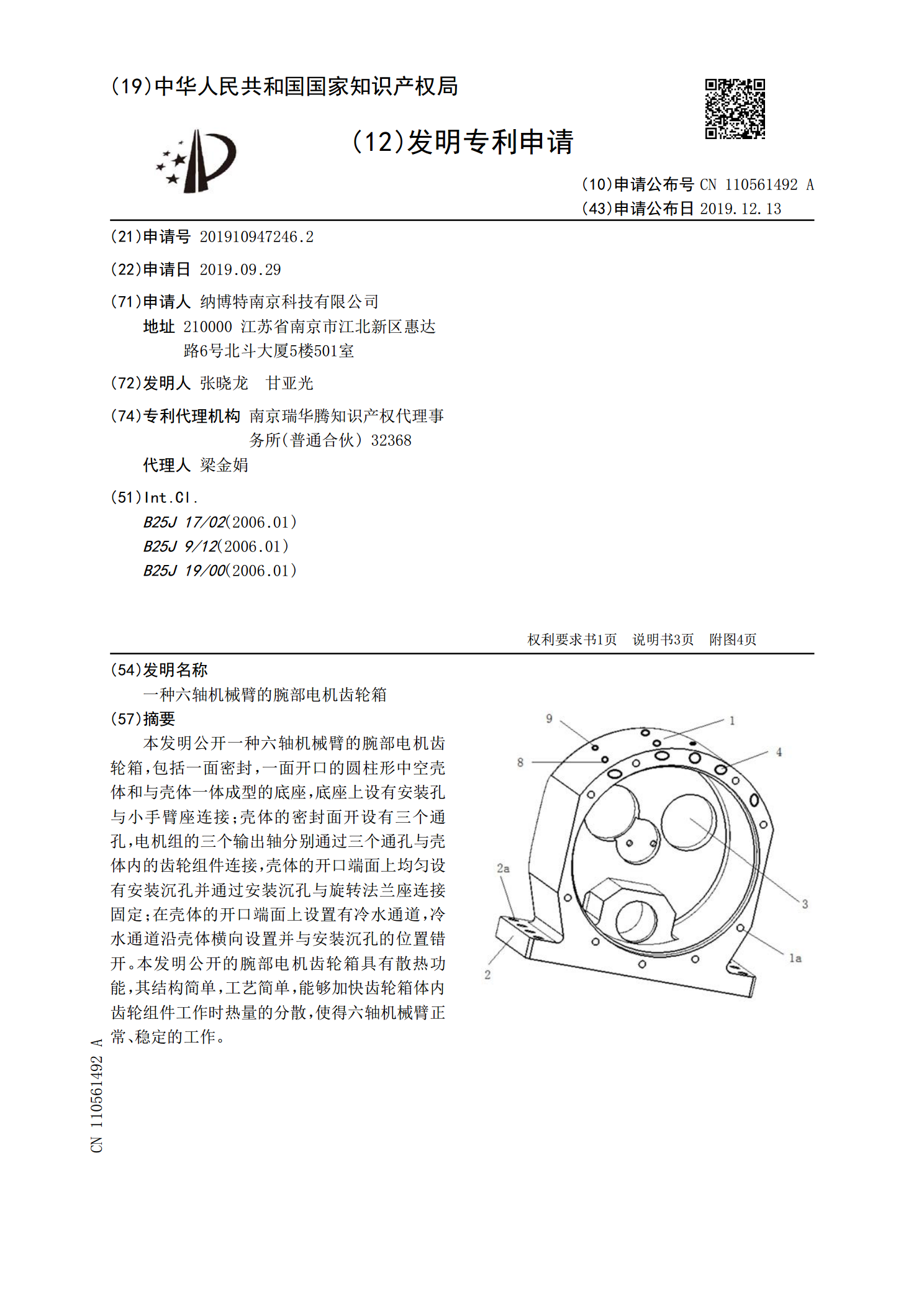
本发明公开一种六轴机械臂的腕部电机齿轮箱,包括一面密封,一面开口的圆柱形中空壳体和与壳体一体成型的底座,底座上设有安装孔与小手臂座连接;壳体的密封面开设有三个通孔,电机组的三个输出轴分别通过三个通孔与壳体内的齿轮组件连接,壳体的开口端面上均匀设有安装沉孔并通过安装沉孔与旋转法兰座连接固定;在壳体的开口端面上设置有冷水通道,冷水通道沿壳体横向设置并与安装沉孔的位置错开。本发明公开的腕部电机齿轮箱具有散热功能,其结构简单,工艺简单,能够加快齿轮箱体内齿轮组件工作时热量的分散,使得六轴机械臂正常、稳定的工作。
一种六轴机械臂.pdf
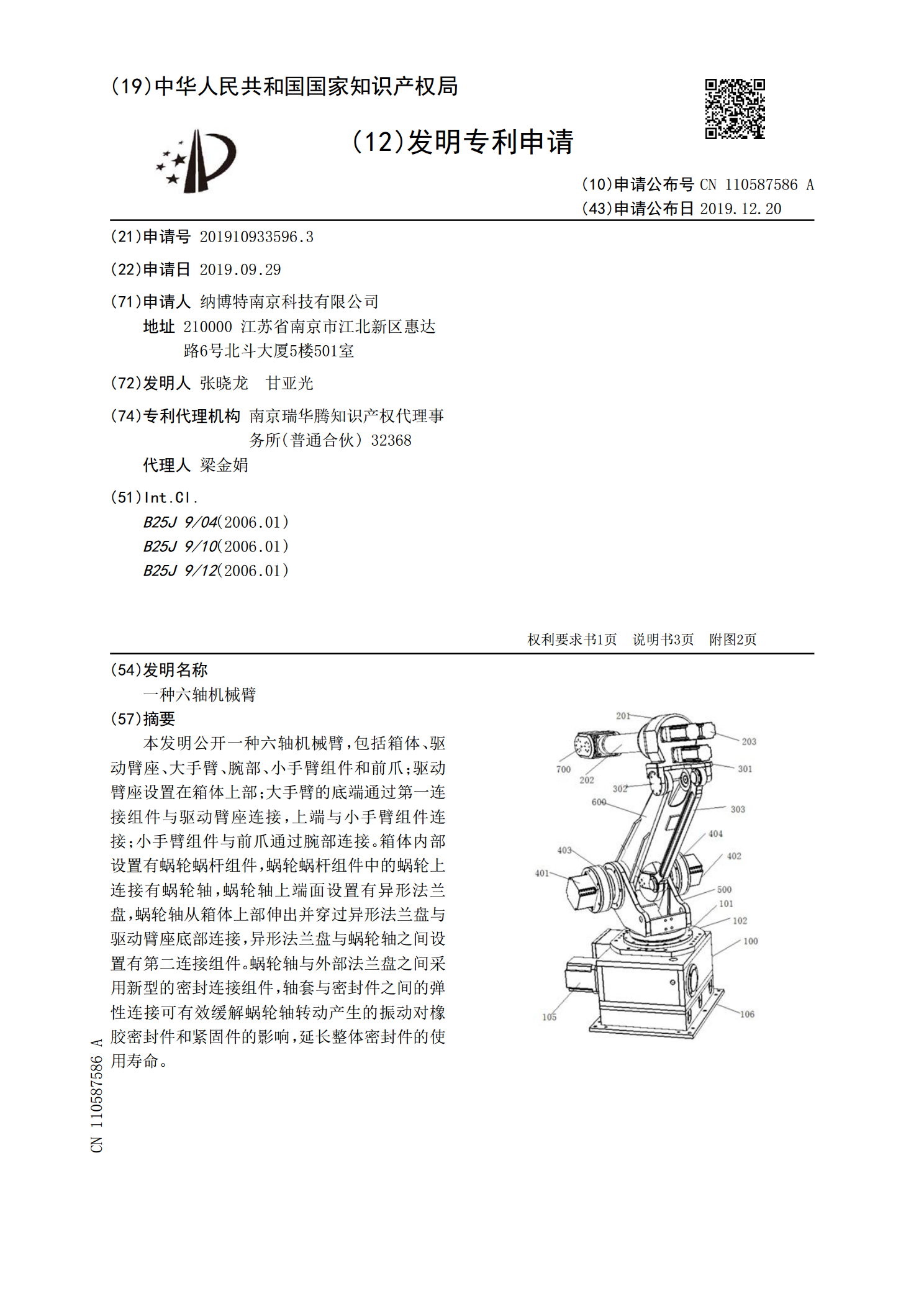
本发明公开一种六轴机械臂,包括箱体、驱动臂座、大手臂、腕部、小手臂组件和前爪;驱动臂座设置在箱体上部;大手臂的底端通过第一连接组件与驱动臂座连接,上端与小手臂组件连接;小手臂组件与前爪通过腕部连接。箱体内部设置有蜗轮蜗杆组件,蜗轮蜗杆组件中的蜗轮上连接有蜗轮轴,蜗轮轴上端面设置有异形法兰盘,蜗轮轴从箱体上部伸出并穿过异形法兰盘与驱动臂座底部连接,异形法兰盘与蜗轮轴之间设置有第二连接组件。蜗轮轴与外部法兰盘之间采用新型的密封连接组件,轴套与密封件之间的弹性连接可有效缓解蜗轮轴转动产生的振动对橡胶密封件和紧固

六轴机械臂.pdf
本发明公开了一种六轴机械臂,所述六轴机械臂包括底座、第一旋转机构、第二旋转机构和旋转单元;底座上竖直设置有短固定轴,短固定轴上活动套接有旋转轮,第一旋转机构固定套接在旋转轮上,以使得当旋转轮转动时,第一旋转机构能够转动;第二旋转机构铰接在第一旋转机构上;旋转单元活动套接在所述第二旋转机构上;第一旋转机构包括第一旋转座、第一旋转轴和第一旋转支杆;第二旋转机构包括第二旋转支杆和第二旋转件;旋转单元包括固接在第二旋转件上的固定框和铰接在固定框上的旋转接头。该六轴机械臂能够提高焊接领域的自动化程度,不需要操作人员
一种六轴机械臂的控制装置.pdf
本发明属于控制装置技术领域,尤其是一种六轴机械臂的控制装置,针对现有的拆装较为繁琐,且容易损坏控制装置的问题,现提出如下方案,其包括固定在六轴机械臂上的箱体,所述箱体内设置有电机,所述箱体内设置有升降机构,所述升降机构包括升降螺杆,所述升降螺杆与电机的输出轴固定连接,所述升降螺杆上螺纹连接有升降板,所述升降板上固定安装有支撑板,所述支撑板上滑动安装有多个顶杆,多个顶杆上固定安装有同一个安装板,多个顶杆上均套设有支撑弹簧,所述升降板上固定安装有第一齿条,所述箱体内转动安装有转杆,本发明能够快速拆装控制装置本