
六轴机械臂.pdf

小云****66

1/7
2/7
3/7

4/7
5/7
6/7
7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

六轴机械臂.pdf
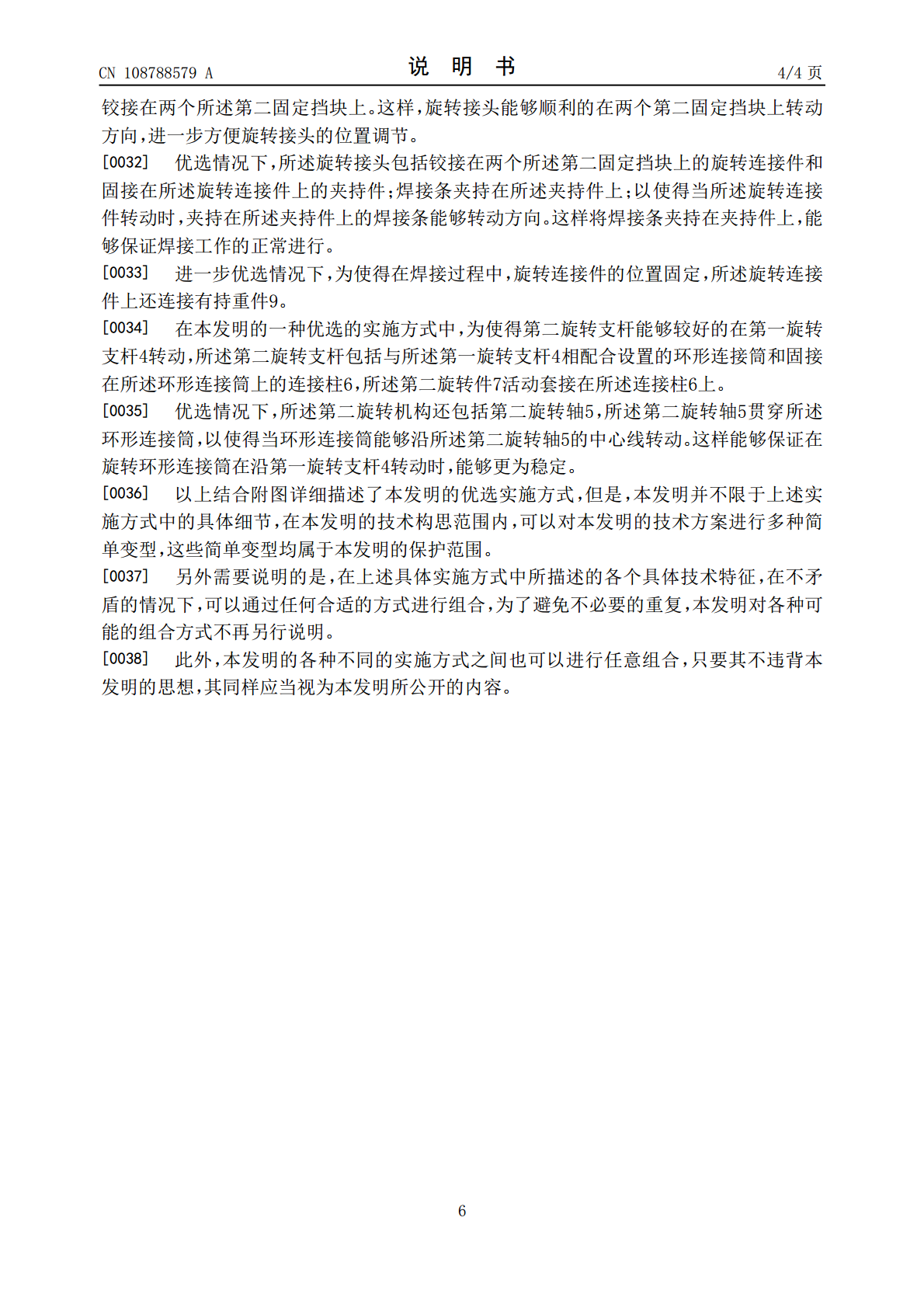
本发明公开了一种六轴机械臂,所述六轴机械臂包括底座、第一旋转机构、第二旋转机构和旋转单元;底座上竖直设置有短固定轴,短固定轴上活动套接有旋转轮,第一旋转机构固定套接在旋转轮上,以使得当旋转轮转动时,第一旋转机构能够转动;第二旋转机构铰接在第一旋转机构上;旋转单元活动套接在所述第二旋转机构上;第一旋转机构包括第一旋转座、第一旋转轴和第一旋转支杆;第二旋转机构包括第二旋转支杆和第二旋转件;旋转单元包括固接在第二旋转件上的固定框和铰接在固定框上的旋转接头。该六轴机械臂能够提高焊接领域的自动化程度,不需要操作人员
六轴机械臂的拆装方法.pdf
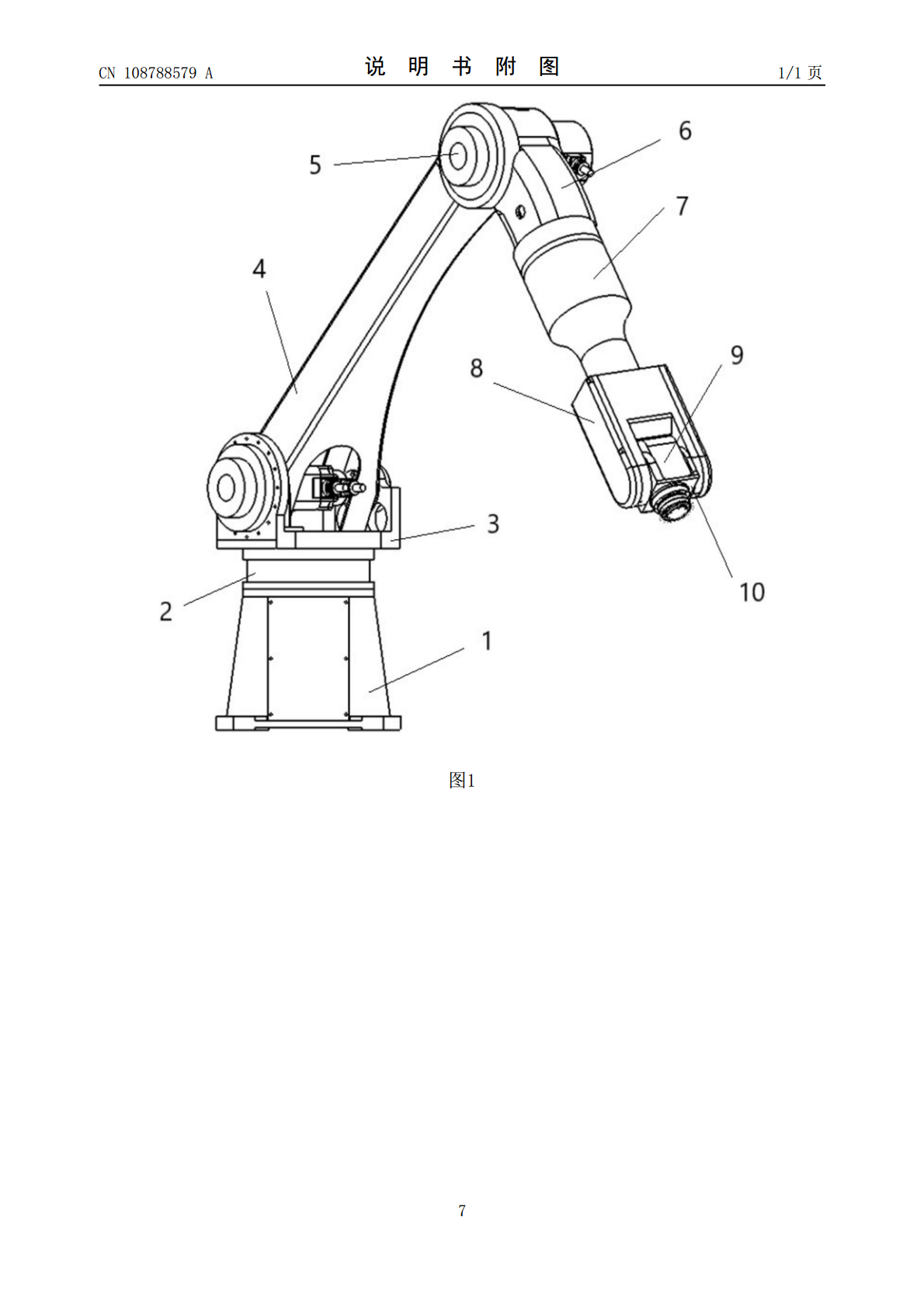
本发明公开了一种六轴机械臂的拆装方法,所述拆装方法包括以下步骤:1)、将六轴机械臂的旋转单元从第二旋转机构的第二旋转件上分离;2)、将六轴机械臂的第二旋转支杆从第一旋转机构的第一旋转支杆上分离;3)、将六轴机械臂的第一旋转座与旋转轮分离。该拆装方法在拆装过程中不会损坏到后期焊接的角度变换的精准度。
六轴机械臂的焊接方法.pdf
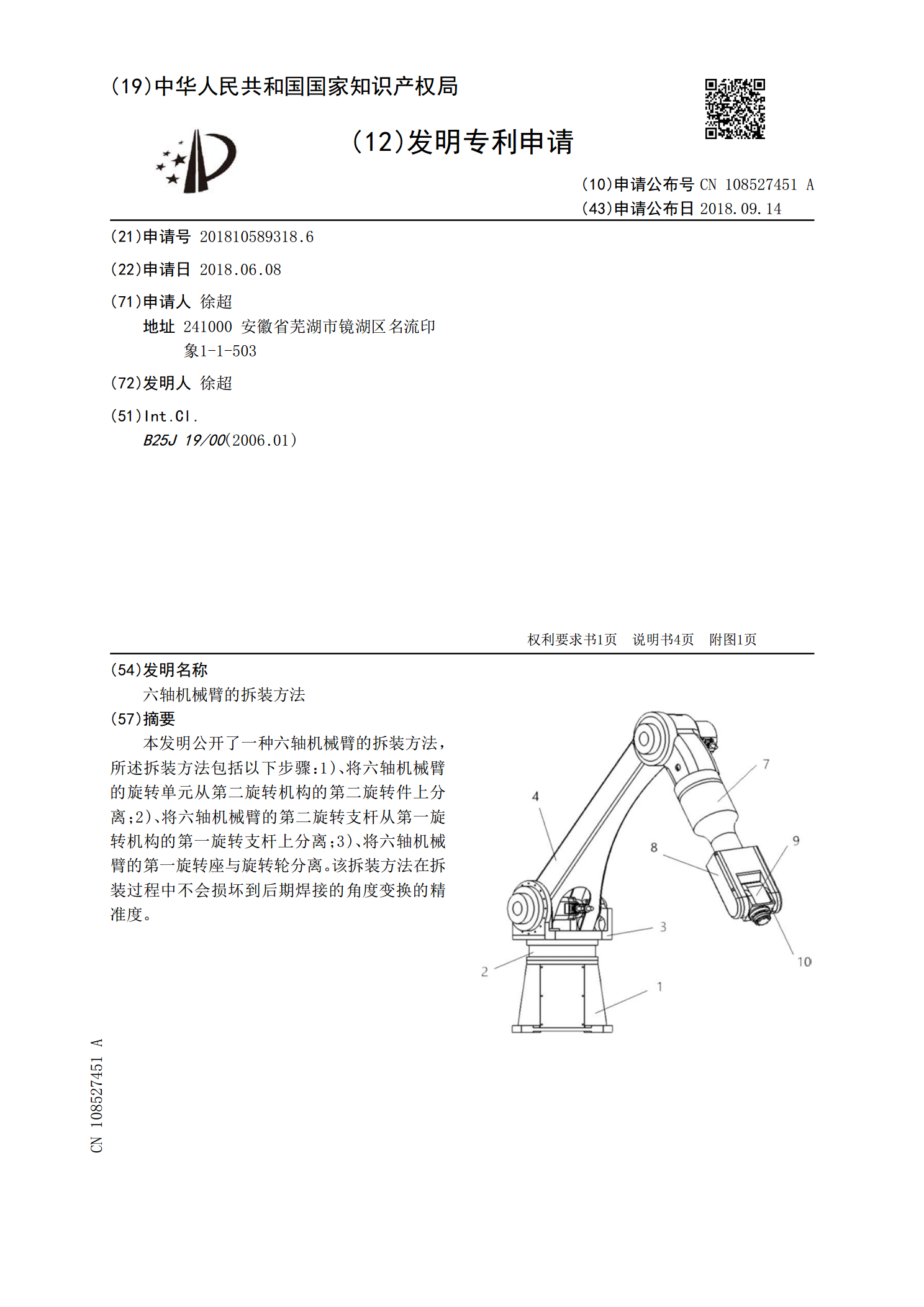
本发明公开了一种六轴机械臂的焊接方法,所述焊接方法包括以下步骤:1)、将焊接条连接在所述六轴机械臂的旋转单元上;2)、将六轴机械臂的第一旋转机构沿底盘旋转;3)、将六轴机械臂的第二旋转机构的第二旋转支杆沿第一旋转机构旋转;4)、将六轴机械臂的第二旋转机构的第二旋转件沿第二旋转支杆转动;5)、调整旋转接头的位置,以使得连接在旋转单元上的焊接条能够朝向待焊接件;6)、连接在旋转单元上的焊接条焊接待焊接件;7)、依次重复步骤1),步骤2),步骤3),步骤4),步骤5)。该焊接方法能够提高焊接领域的自动化程度,不
一种六轴机械臂.pdf
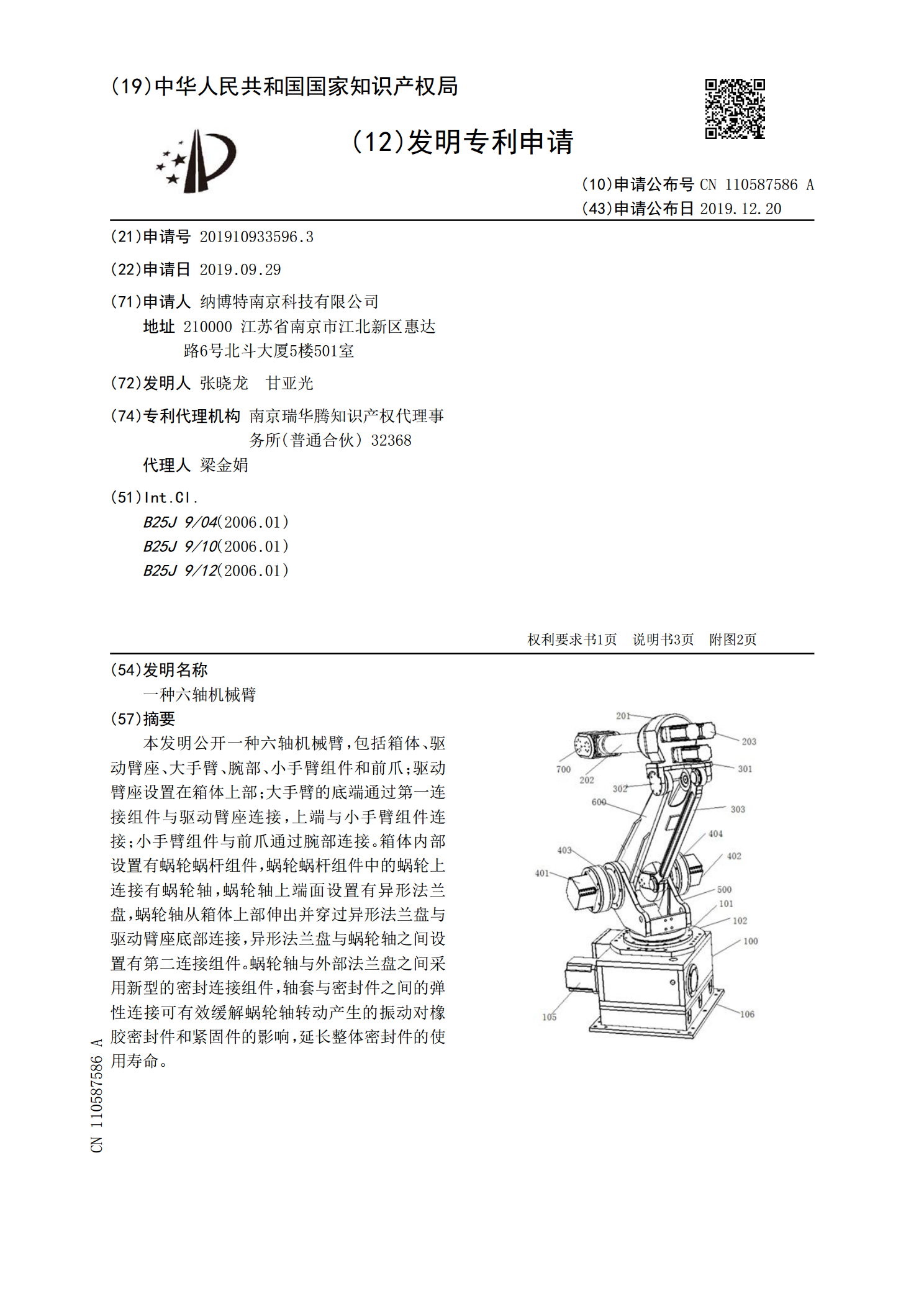
本发明公开一种六轴机械臂,包括箱体、驱动臂座、大手臂、腕部、小手臂组件和前爪;驱动臂座设置在箱体上部;大手臂的底端通过第一连接组件与驱动臂座连接,上端与小手臂组件连接;小手臂组件与前爪通过腕部连接。箱体内部设置有蜗轮蜗杆组件,蜗轮蜗杆组件中的蜗轮上连接有蜗轮轴,蜗轮轴上端面设置有异形法兰盘,蜗轮轴从箱体上部伸出并穿过异形法兰盘与驱动臂座底部连接,异形法兰盘与蜗轮轴之间设置有第二连接组件。蜗轮轴与外部法兰盘之间采用新型的密封连接组件,轴套与密封件之间的弹性连接可有效缓解蜗轮轴转动产生的振动对橡胶密封件和紧固

六轴数控机械臂说明.docx
六轴数控机械臂(机械臂本体)说明各轴尺寸各轴名称:六轴主要参数:腰部:可旋转360°+,57步进电机(4线2项),减速比(1:250)大臂:57步进电机(4线2项),减速比(1:250)小臂:57步进电机(4线2项),减速比(1:250)小臂旋转:可旋转+-180度,42步进电机(4线2项),减速比(1:6.25)腕部:可旋转+-110度,42步进电机(4线2项),减速比(1:6.25)爪部:可旋转360°+,42步进电机(4线2项),减速比(1:2.5)步进电机说明:57步进电机参数:型号:57BYGH