
防爆轮式巡检机器人.pdf

一条****发啊


1/10

2/10
3/10

4/10

5/10

6/10
7/10

8/10
9/10

10/10
亲,该文档总共23页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
防爆轮式巡检机器人.pdf
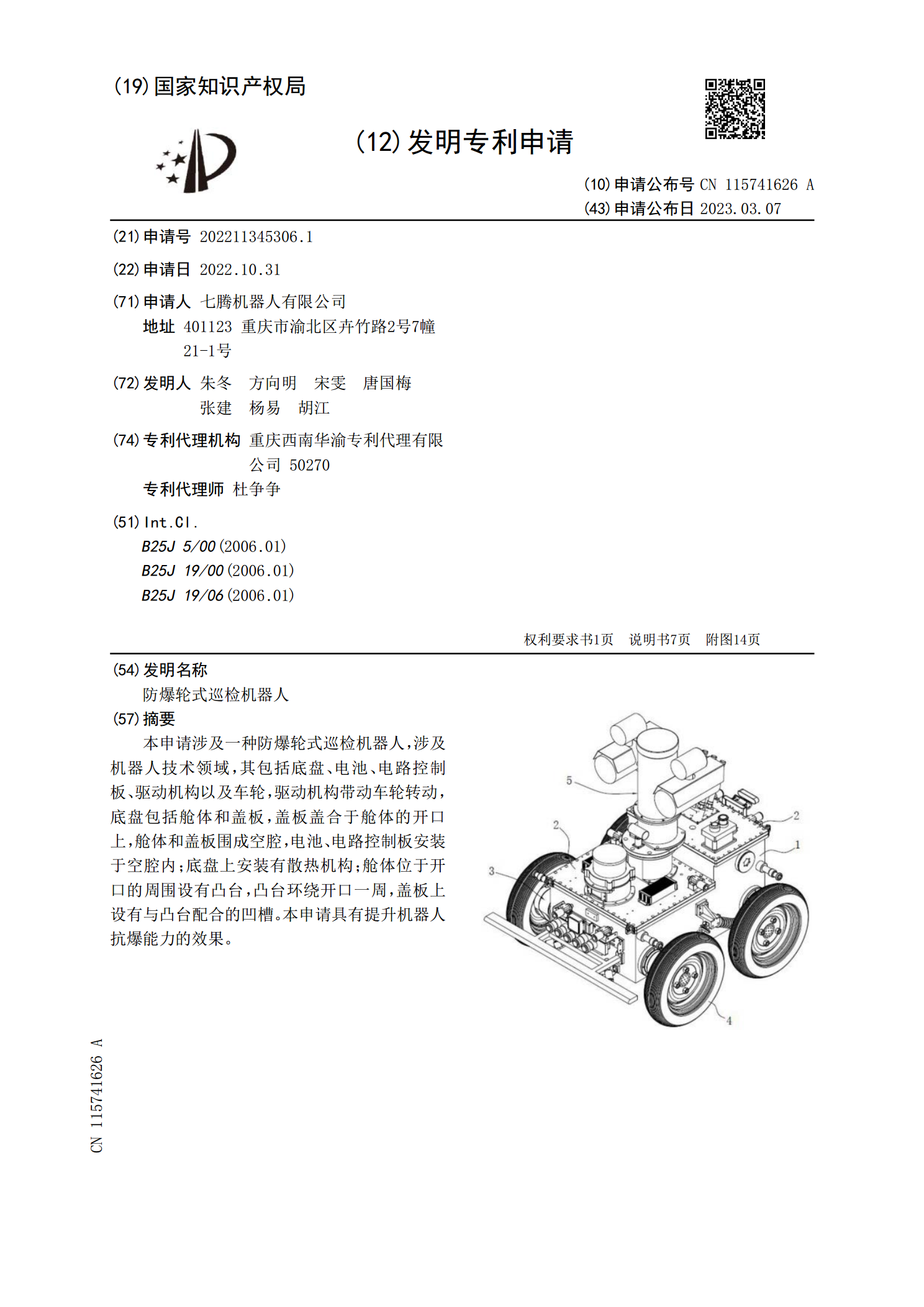
本申请涉及一种防爆轮式巡检机器人,涉及机器人技术领域,其包括底盘、电池、电路控制板、驱动机构以及车轮,驱动机构带动车轮转动,底盘包括舱体和盖板,盖板盖合于舱体的开口上,舱体和盖板围成空腔,电池、电路控制板安装于空腔内;底盘上安装有散热机构;舱体位于开口的周围设有凸台,凸台环绕开口一周,盖板上设有与凸台配合的凹槽。本申请具有提升机器人抗爆能力的效果。
一种防爆轮式巡检机器人.pdf
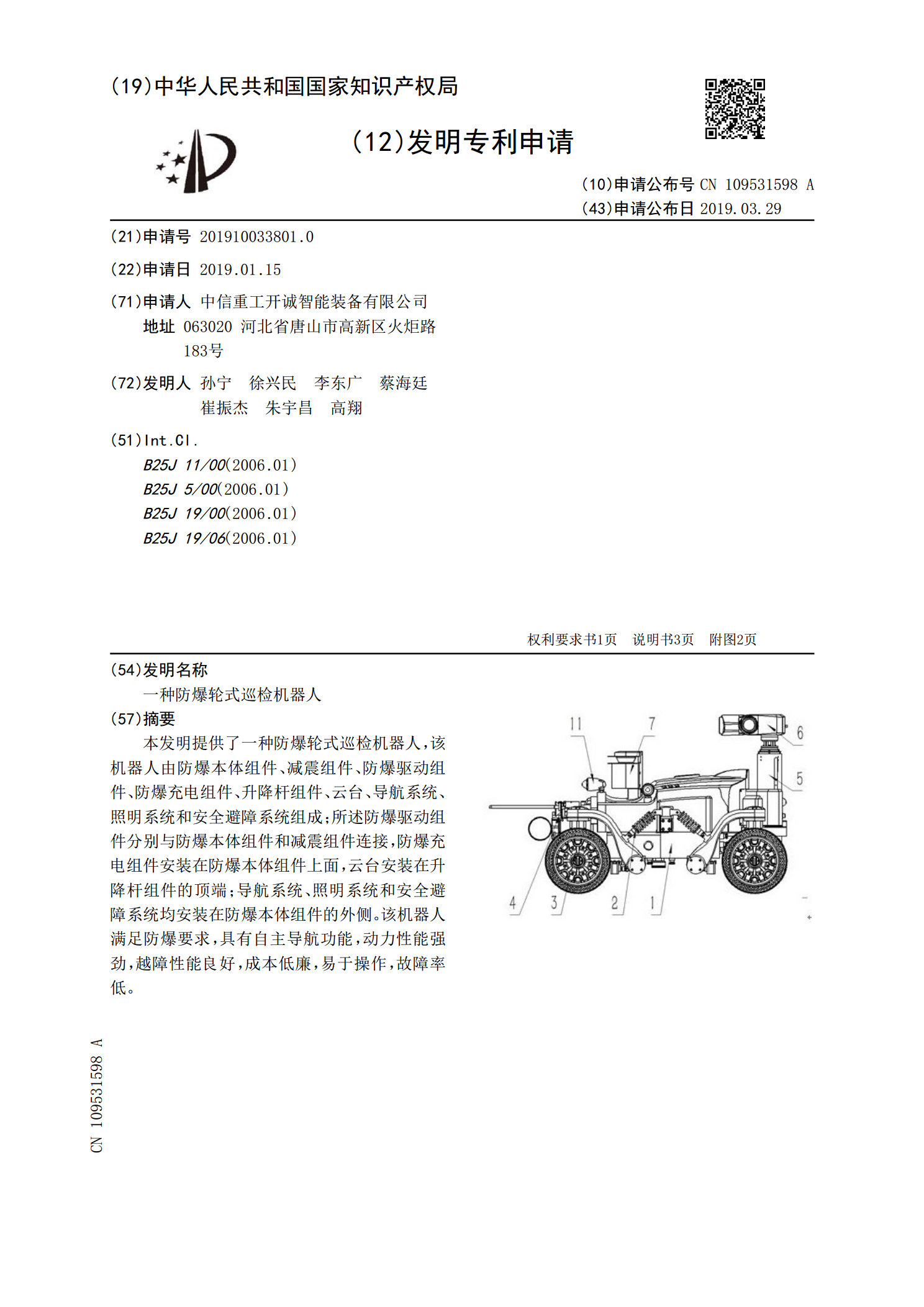
本发明提供了一种防爆轮式巡检机器人,该机器人由防爆本体组件、减震组件、防爆驱动组件、防爆充电组件、升降杆组件、云台、导航系统、照明系统和安全避障系统组成;所述防爆驱动组件分别与防爆本体组件和减震组件连接,防爆充电组件安装在防爆本体组件上面,云台安装在升降杆组件的顶端;导航系统、照明系统和安全避障系统均安装在防爆本体组件的外侧。该机器人满足防爆要求,具有自主导航功能,动力性能强劲,越障性能良好,成本低廉,易于操作,故障率低。
一种防爆轮式巡检机器人防爆自动充电装置.pdf
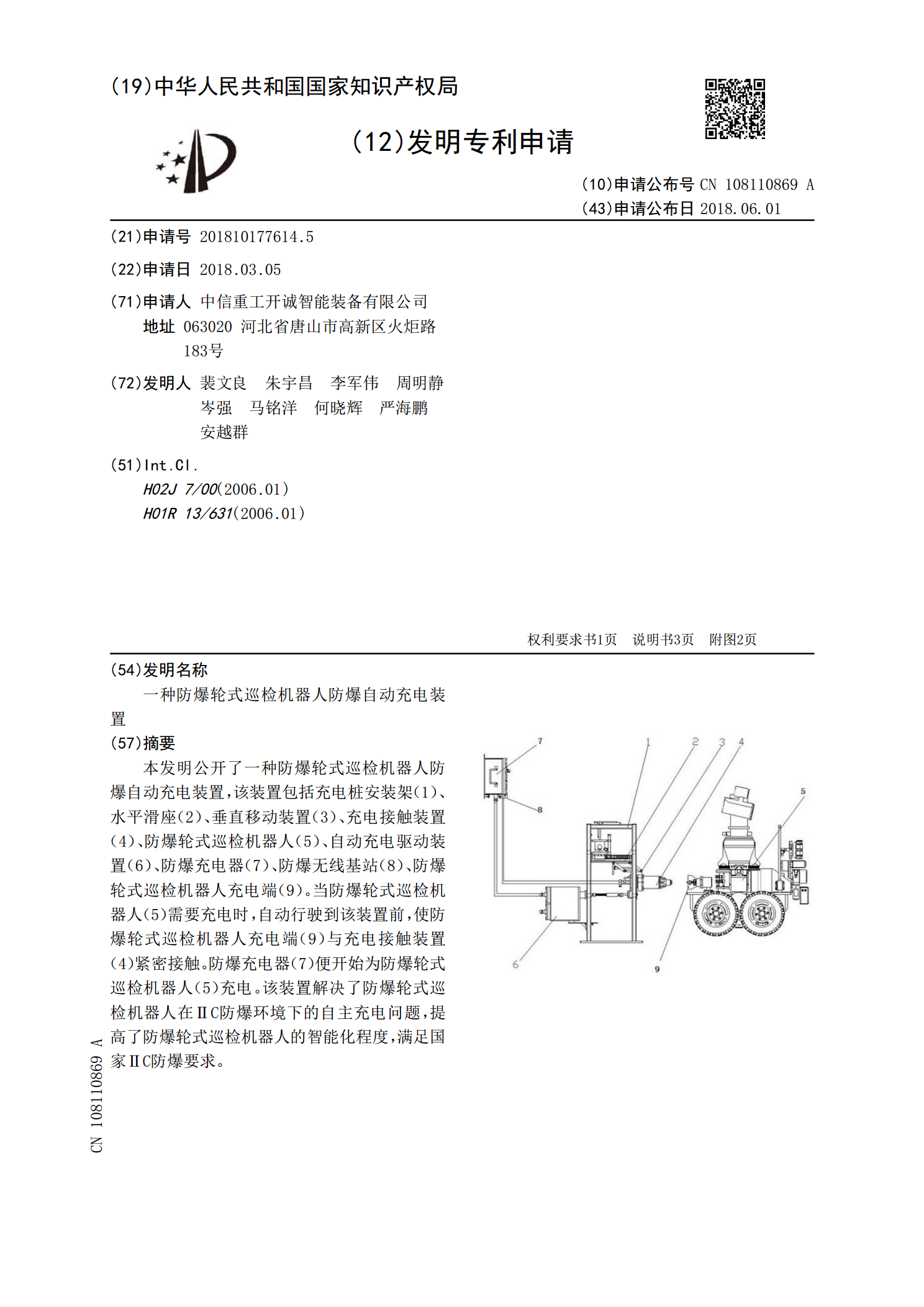
本发明公开了一种防爆轮式巡检机器人防爆自动充电装置,该装置包括充电桩安装架(1)、水平滑座(2)、垂直移动装置(3)、充电接触装置(4)、防爆轮式巡检机器人(5)、自动充电驱动装置(6)、防爆充电器(7)、防爆无线基站(8)、防爆轮式巡检机器人充电端(9)。当防爆轮式巡检机器人(5)需要充电时,自动行驶到该装置前,使防爆轮式巡检机器人充电端(9)与充电接触装置(4)紧密接触。防爆充电器(7)便开始为防爆轮式巡检机器人(5)充电。该装置解决了防爆轮式巡检机器人在ⅡC防爆环境下的自主充电问题,提高了防爆轮式巡

一种用于防爆轮式巡检机器人的防爆充电系统及充电方法.pdf
本发明提供了一种用于防爆轮式巡检机器人的防爆充电系统及充电方法,该充电系统包括:防爆轮式巡检机器人、充电装置、防爆正压柜、到位传感器一、到位传感器二、防爆正压柜门、上位机、防爆正压柜PLC控制箱、气动开门机和防爆正压柜内传感器。本发明利用防爆正压柜在防爆区域能起到隔爆效果的优势,将不具备防爆区域使用的充电装置置于其中,防爆轮式巡检机器人通过穿越防爆正压柜门,在防爆正压柜内实现安全充电。本发明将机器人和充电机构及控制系统进行有机的结合,实现了机器人在防爆区域下自动充电。
一种输油场站防爆轮式巡检机器人远程控制装置.pdf
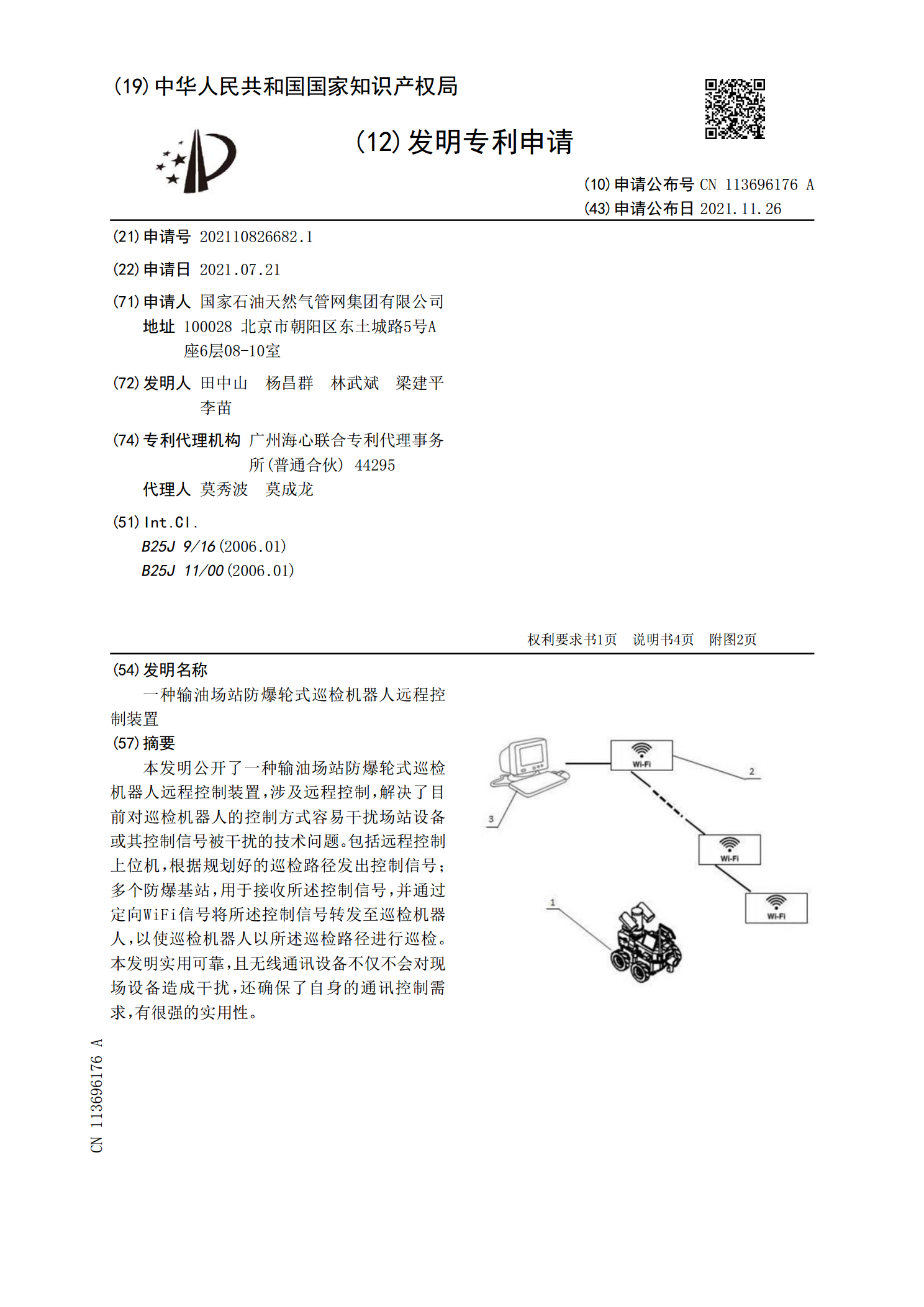
本发明公开了一种输油场站防爆轮式巡检机器人远程控制装置,涉及远程控制,解决了目前对巡检机器人的控制方式容易干扰场站设备或其控制信号被干扰的技术问题。包括远程控制上位机,根据规划好的巡检路径发出控制信号;多个防爆基站,用于接收所述控制信号,并通过定向WiFi信号将所述控制信号转发至巡检机器人,以使巡检机器人以所述巡检路径进行巡检。本发明实用可靠,且无线通讯设备不仅不会对现场设备造成干扰,还确保了自身的通讯控制需求,有很强的实用性。