
多轴机械臂关节伺服系统的控制方法及系统.pdf

韶敏****ab


1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10

9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

多轴机械臂关节伺服系统的控制方法及系统.pdf
本申请提供一种多轴机械臂关节伺服系统的控制方法及系统,应用于机器人及其伺服技术领域,其中控制方法包括构建机械臂中各关节的伺服系统对应的加速度反馈闭环传递函数;从所述机械臂在工作期间容许的负载惯量的变化范围,按预设的选取策略确定各关节的伺服系统对应的负载惯量比R值;根据各轴加速度增益值具有最小增益偏差的约束关系,求解出各关节的伺服系统对应的加速度反馈增益k值;将各关节的伺服系统对应的负载惯量比R值及加速度反馈增益k值,用于该关节的伺服系统对应的所述加速度反馈闭环传递函数中。通过从机械臂整体结构的惯量变化角度

空间机械臂关节伺服系统控制参数在线优化方法研究的中期报告.docx
空间机械臂关节伺服系统控制参数在线优化方法研究的中期报告一、研究背景空间机械臂是航天器上应用最广的机械臂之一,其与卫星、空间站等空间器件配合使用,可以完成很多关键任务,如维修、装配、拆卸等操作,对于太空探测和开发具有重要意义。空间机械臂执行器的关节伺服系统是机械臂的核心部分之一,其性能直接影响机械臂的工作效率和稳定性。因此,关节伺服系统的优化控制策略十分关键。目前,国内外已有许多针对空间机械臂关节伺服系统控制的研究,其中包括开环控制和闭环控制两种方式。开环控制简单易实现,但容易受到干扰、摩擦等因素的影响,

平面关节四轴机械臂.pdf
本发明公开了一种平面关节四轴机械臂,包括底座,底座上安装有第一电机和滚珠丝杆模组,第一电机与滚珠丝杆模组通过同步带连接,螺母组件上安装有第二电机和大臂,大臂的前端安装有第三电机和前臂,前臂的前端安装有第四电机和末端执行器;第一、第二、第三、第四电机通过EtherCAT线缆与PLC控制器连接。本申请通过采用一体化低压伺服电机作为机械臂关节轴,采用滚珠丝杠模组为第一轴,使用EtherCAT线缆连接各关节,使得机械臂质量轻,惯量小,集成度高,运动速度快,通讯带宽提升,响应性、稳定性增强。
保证瞬态性能的机械臂伺服系统死区补偿控制方法.pdf
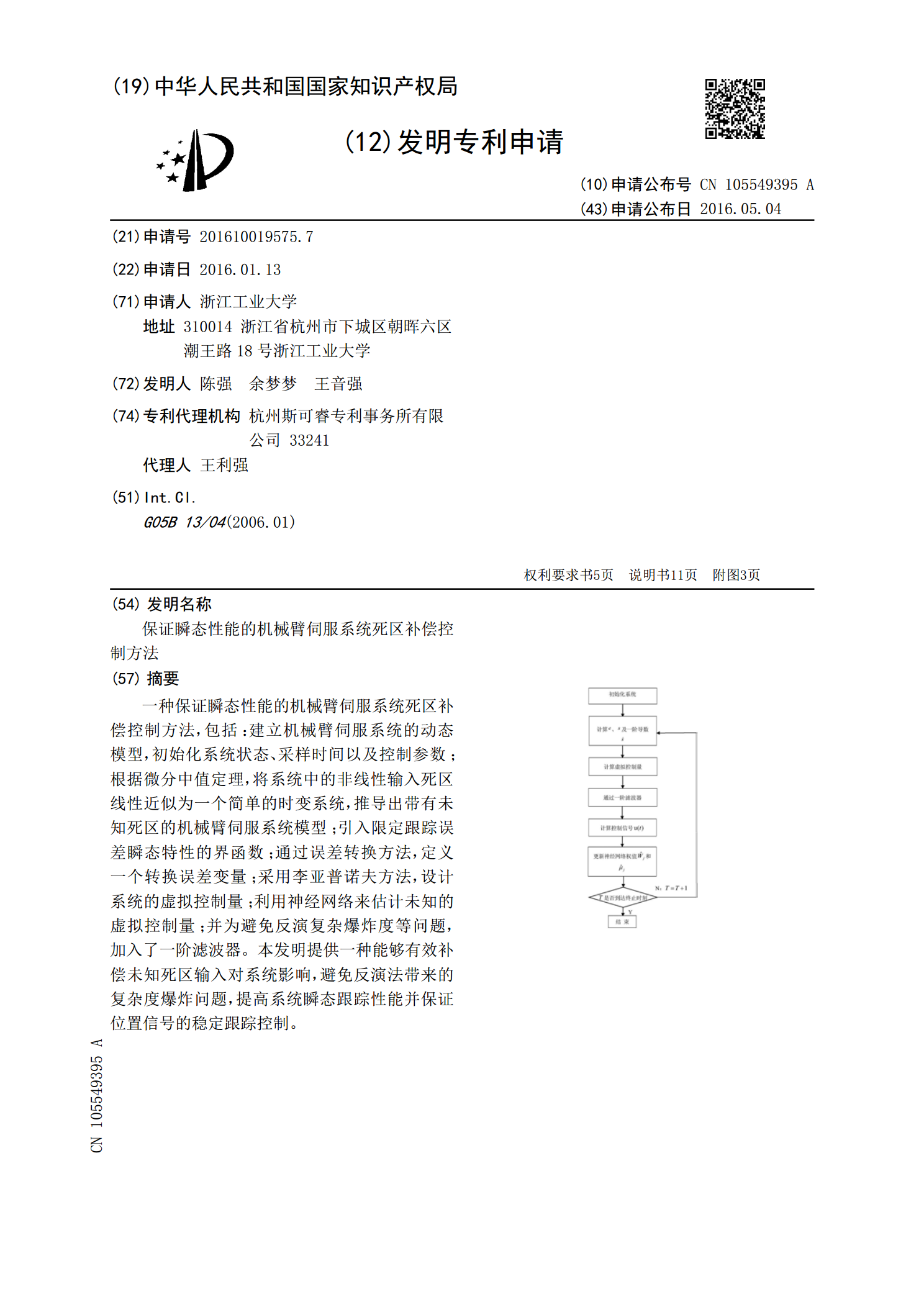
一种保证瞬态性能的机械臂伺服系统死区补偿控制方法,包括:建立机械臂伺服系统的动态模型,初始化系统状态、采样时间以及控制参数;根据微分中值定理,将系统中的非线性输入死区线性近似为一个简单的时变系统,推导出带有未知死区的机械臂伺服系统模型;引入限定跟踪误差瞬态特性的界函数;通过误差转换方法,定义一个转换误差变量;采用李亚普诺夫方法,设计系统的虚拟控制量;利用神经网络来估计未知的虚拟控制量;并为避免反演复杂爆炸度等问题,加入了一阶滤波器。本发明提供一种能够有效补偿未知死区输入对系统影响,避免反演法带来的复杂度爆
基于多关节机械臂实现采摘的控制方法、系统及装置.pdf
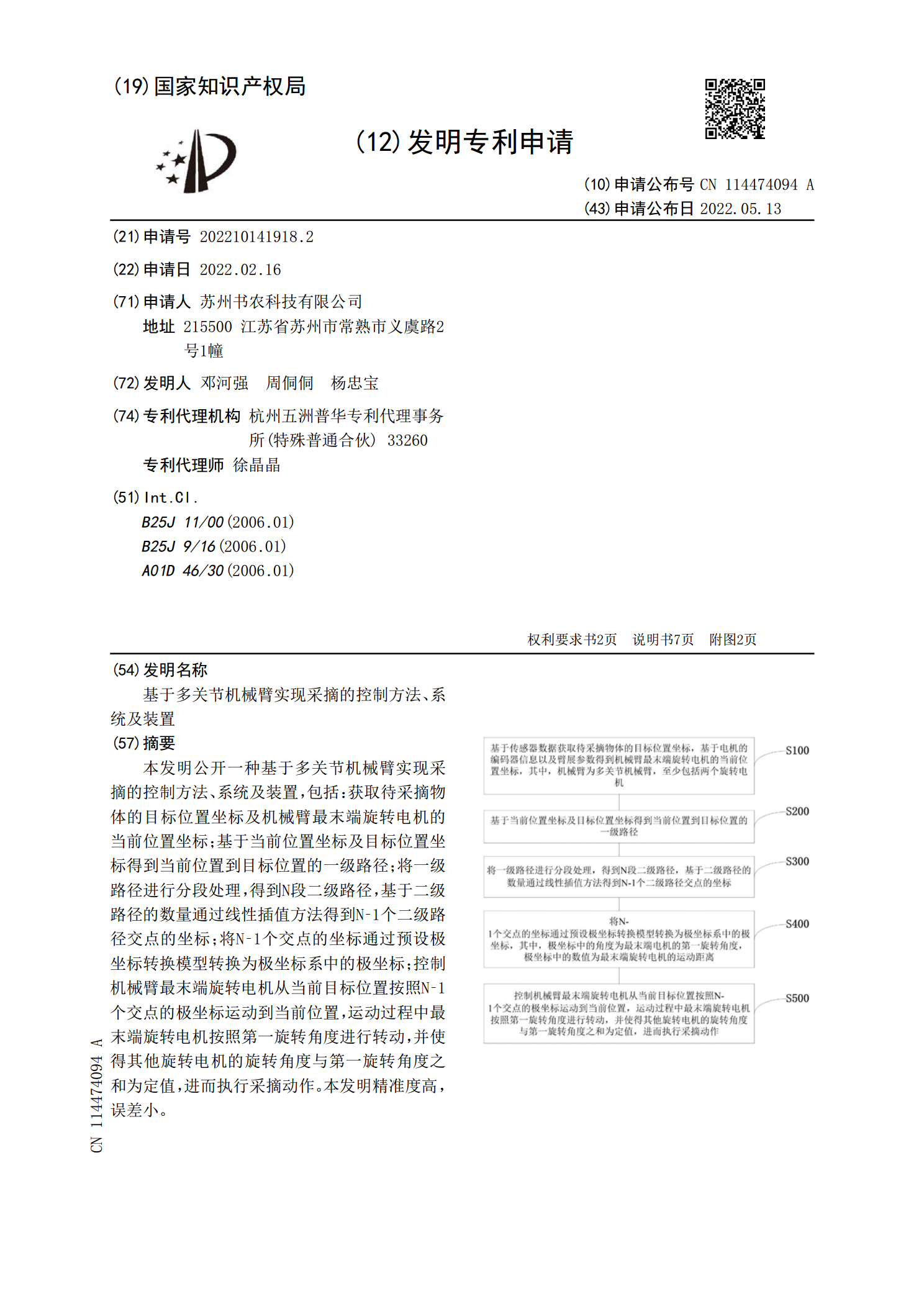
本发明公开一种基于多关节机械臂实现采摘的控制方法、系统及装置,包括:获取待采摘物体的目标位置坐标及机械臂最末端旋转电机的当前位置坐标;基于当前位置坐标及目标位置坐标得到当前位置到目标位置的一级路径;将一级路径进行分段处理,得到N段二级路径,基于二级路径的数量通过线性插值方法得到N?1个二级路径交点的坐标;将N?1个交点的坐标通过预设极坐标转换模型转换为极坐标系中的极坐标;控制机械臂最末端旋转电机从当前目标位置按照N?1个交点的极坐标运动到当前位置,运动过程中最末端旋转电机按照第一旋转角度进行转动,并使得其