
空间机械臂关节伺服系统控制参数在线优化方法研究的中期报告.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

空间机械臂关节伺服系统控制参数在线优化方法研究的中期报告.docx
空间机械臂关节伺服系统控制参数在线优化方法研究的中期报告一、研究背景空间机械臂是航天器上应用最广的机械臂之一,其与卫星、空间站等空间器件配合使用,可以完成很多关键任务,如维修、装配、拆卸等操作,对于太空探测和开发具有重要意义。空间机械臂执行器的关节伺服系统是机械臂的核心部分之一,其性能直接影响机械臂的工作效率和稳定性。因此,关节伺服系统的优化控制策略十分关键。目前,国内外已有许多针对空间机械臂关节伺服系统控制的研究,其中包括开环控制和闭环控制两种方式。开环控制简单易实现,但容易受到干扰、摩擦等因素的影响,

伺服运动系统控制参数在线调节算法研究.docx
伺服运动系统控制参数在线调节算法研究伺服运动系统控制参数在线调节算法研究摘要:伺服运动系统是一种常见的控制系统,用于精确控制机械设备的位置、速度和加速度等。控制参数的在线调节能够提高系统的性能和稳定性,从而满足更高的需求。本文就伺服运动系统控制参数在线调节算法进行了研究,通过分析不同的在线调节算法策略,探讨其优缺点,并给出了一种基于自适应控制的算法。关键词:伺服运动系统,控制参数,在线调节,算法研究一、引言伺服运动系统是一种常见的控制系统,广泛应用于机械加工、自动化装配等领域。其控制参数的设置对系统的性能

空间机械臂非线性传动关节的位置控制策略研究的中期报告.docx
空间机械臂非线性传动关节的位置控制策略研究的中期报告本文主要对空间机械臂非线性传动关节的位置控制策略进行了研究,以下是中期报告的内容:1.文献综述针对空间机械臂非线性传动关节的控制问题,国内外学者提出了许多控制策略,如模糊控制、自适应控制、PID控制等。其中,模糊控制适用于非线性系统控制,自适应控制可以根据系统状态自动调整控制器参数,PID控制是最常用的控制策略之一。但是,在空间机械臂传动关节的控制中,由于存在惯性力、摩擦力和离心力等非线性因素,传统的控制策略难以取得良好的控制效果。2.研究内容本文旨在探
机械臂关节刚度参数的识别方法.pdf
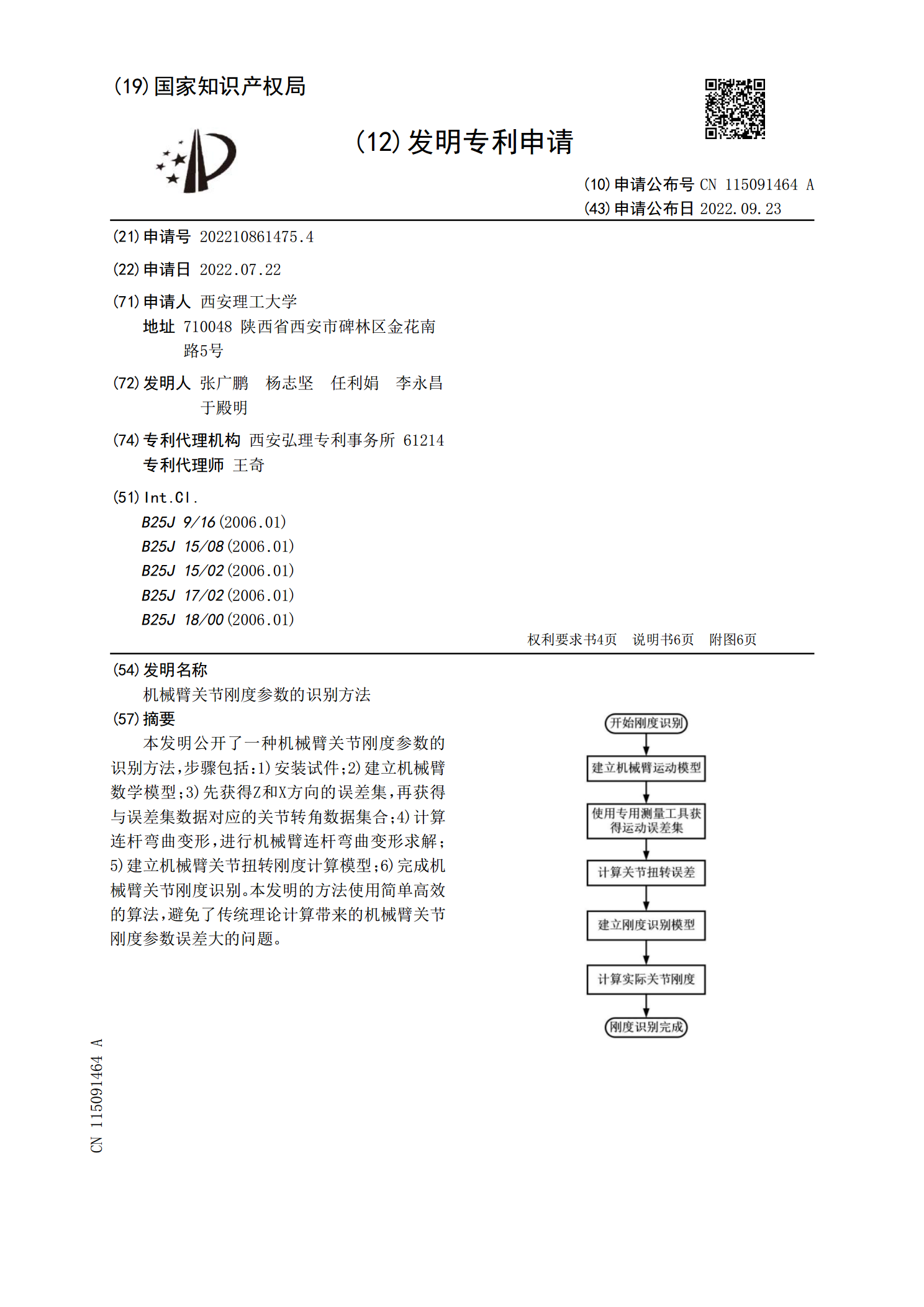
本发明公开了一种机械臂关节刚度参数的识别方法,步骤包括:1)安装试件;2)建立机械臂数学模型;3)先获得Z和X方向的误差集,再获得与误差集数据对应的关节转角数据集合;4)计算连杆弯曲变形,进行机械臂连杆弯曲变形求解;5)建立机械臂关节扭转刚度计算模型;6)完成机械臂关节刚度识别。本发明的方法使用简单高效的算法,避免了传统理论计算带来的机械臂关节刚度参数误差大的问题。

基于图像的机械臂视觉伺服控制研究的中期报告.docx
基于图像的机械臂视觉伺服控制研究的中期报告本文是有关基于图像的机械臂视觉伺服控制研究的中期报告。该研究旨在研究视觉伺服控制技术,将其应用于机械臂的控制中,以实现更高效、更准确的机械臂控制。本文主要介绍研究的背景、研究内容、实验方案等。一、研究背景机械臂是一种多功能的自动化设备,它可以执行多种任务,如抓取、装配、喷涂等,因此被广泛应用于各个领域。目前,机械臂的控制主要分为两种方法:位置控制和力控制。在位置控制中,机械臂运动到指定的位置,但由于机械臂在运动中可能受到外界因素的干扰,因此位置控制方法不够精确。在