
基于多关节机械臂实现采摘的控制方法、系统及装置.pdf

猫巷****松臣

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于多关节机械臂实现采摘的控制方法、系统及装置.pdf
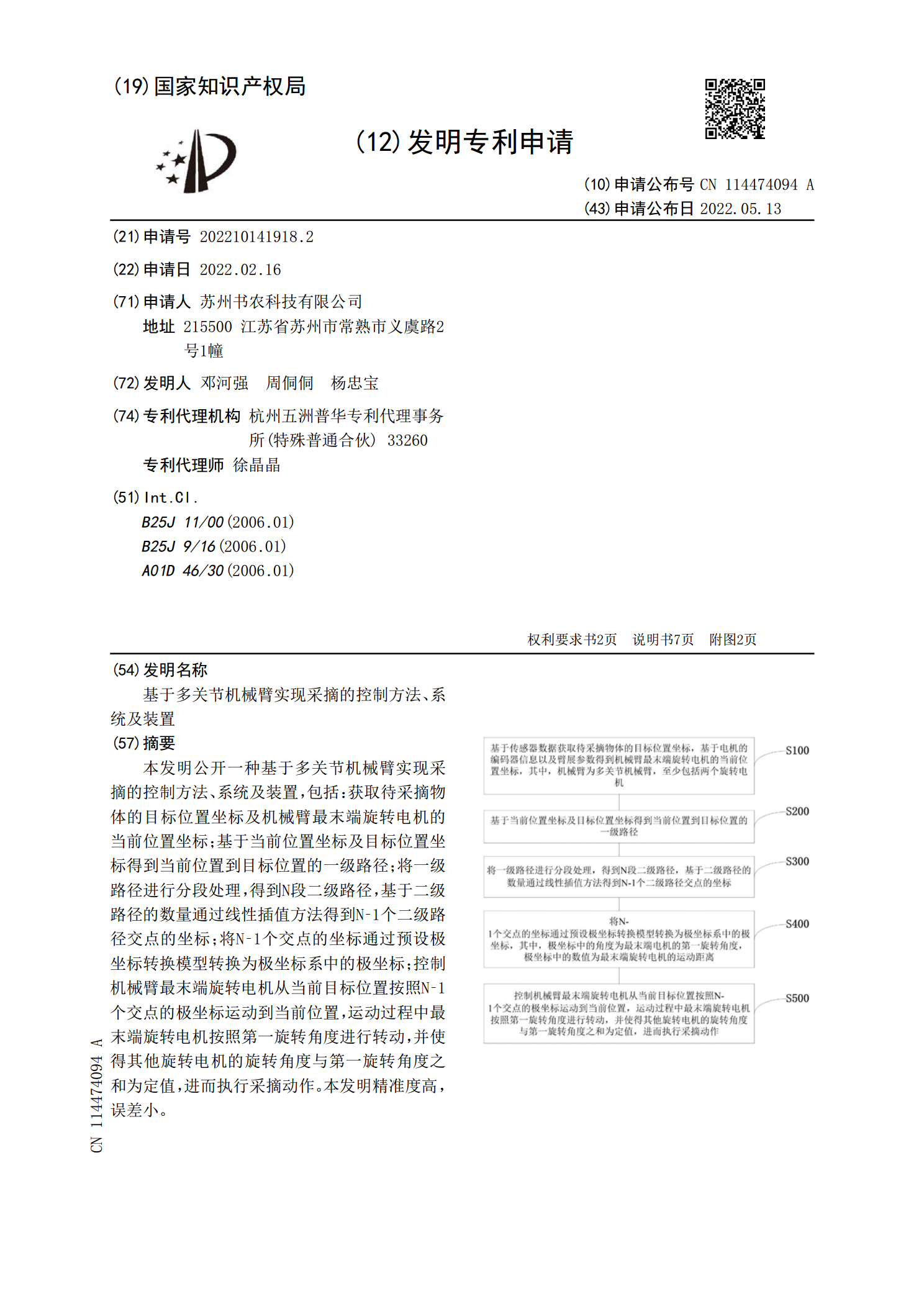
本发明公开一种基于多关节机械臂实现采摘的控制方法、系统及装置,包括:获取待采摘物体的目标位置坐标及机械臂最末端旋转电机的当前位置坐标;基于当前位置坐标及目标位置坐标得到当前位置到目标位置的一级路径;将一级路径进行分段处理,得到N段二级路径,基于二级路径的数量通过线性插值方法得到N?1个二级路径交点的坐标;将N?1个交点的坐标通过预设极坐标转换模型转换为极坐标系中的极坐标;控制机械臂最末端旋转电机从当前目标位置按照N?1个交点的极坐标运动到当前位置,运动过程中最末端旋转电机按照第一旋转角度进行转动,并使得其

一种基于机械臂的果实采摘方法、系统及装置.pdf
本发明公开了一种基于机械臂的果实采摘方法、系统及装置,涉及农业采摘机械技术领域,主要目的在于提升对待采摘目标的采摘准确率。本发明主要的技术方案为:根据第一视觉模块采集的图像确定至少一个待采摘目标的第一位置;根据所述第一位置以及机械臂的当前位置确定所述待采摘目标的采摘顺序列表;基于所述采摘顺序列表控制所述机械臂将第二视觉模块移动至待采摘目标对应的第一位置;根据所述第二视觉模块采集的图像确定所述待采摘目标的尺寸信息以及采摘位置;根据所述尺寸信息调整所述果实采摘模块的采摘口尺寸;根据所述采摘位置控制所述果实采摘

多轴机械臂关节伺服系统的控制方法及系统.pdf
本申请提供一种多轴机械臂关节伺服系统的控制方法及系统,应用于机器人及其伺服技术领域,其中控制方法包括构建机械臂中各关节的伺服系统对应的加速度反馈闭环传递函数;从所述机械臂在工作期间容许的负载惯量的变化范围,按预设的选取策略确定各关节的伺服系统对应的负载惯量比R值;根据各轴加速度增益值具有最小增益偏差的约束关系,求解出各关节的伺服系统对应的加速度反馈增益k值;将各关节的伺服系统对应的负载惯量比R值及加速度反馈增益k值,用于该关节的伺服系统对应的所述加速度反馈闭环传递函数中。通过从机械臂整体结构的惯量变化角度

基于Android移动终端控制的采摘机械臂系统设计.docx
基于Android移动终端控制的采摘机械臂系统设计摘要:本文介绍了一种基于Android移动终端控制的采摘机械臂系统的设计。该系统的主要作用是替代传统的人工采摘方式,提高采摘效率和质量。通过Android应用程序控制机械臂的运动,可以选择各种不同的采摘方式和参数,提高机械臂的灵活性和适用性。同时,该系统还集成了传感器和监控功能,可以监测机械臂的状态和环境条件,并可实时反馈到移动终端。关键词:Android移动终端,采摘机械臂,设计,控制,传感器引言:随着社会和科技的发展,传统的人工采摘方式已经越来越难以满

基于无动力关节臂的工业机械臂示教系统设计与实现.docx
基于无动力关节臂的工业机械臂示教系统设计与实现基于无动力关节臂的工业机械臂示教系统设计与实现摘要:工业机械臂在现代制造业中扮演着重要的角色,具有高效、可靠和精准的特点。示教是机械臂编程的一种常见方式,可以直接通过操作示教器件来实现机械臂的运动轨迹。本文以无动力关节臂为基础,设计并实现了一种工业机械臂示教系统。该系统采用基于图像识别的示教方式,能够实现对机械臂运动轨迹的准确控制,并具有广泛的应用前景。关键词:无动力关节臂;工业机械臂;示教系统;图像识别1.引言随着现代制造业的发展,工业机械臂逐渐被广泛应用于