
保证瞬态性能的机械臂伺服系统死区补偿控制方法.pdf

是你****辉呀

1/10

2/10

3/10

4/10
5/10

6/10
7/10
8/10
9/10
10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
保证瞬态性能的机械臂伺服系统死区补偿控制方法.pdf
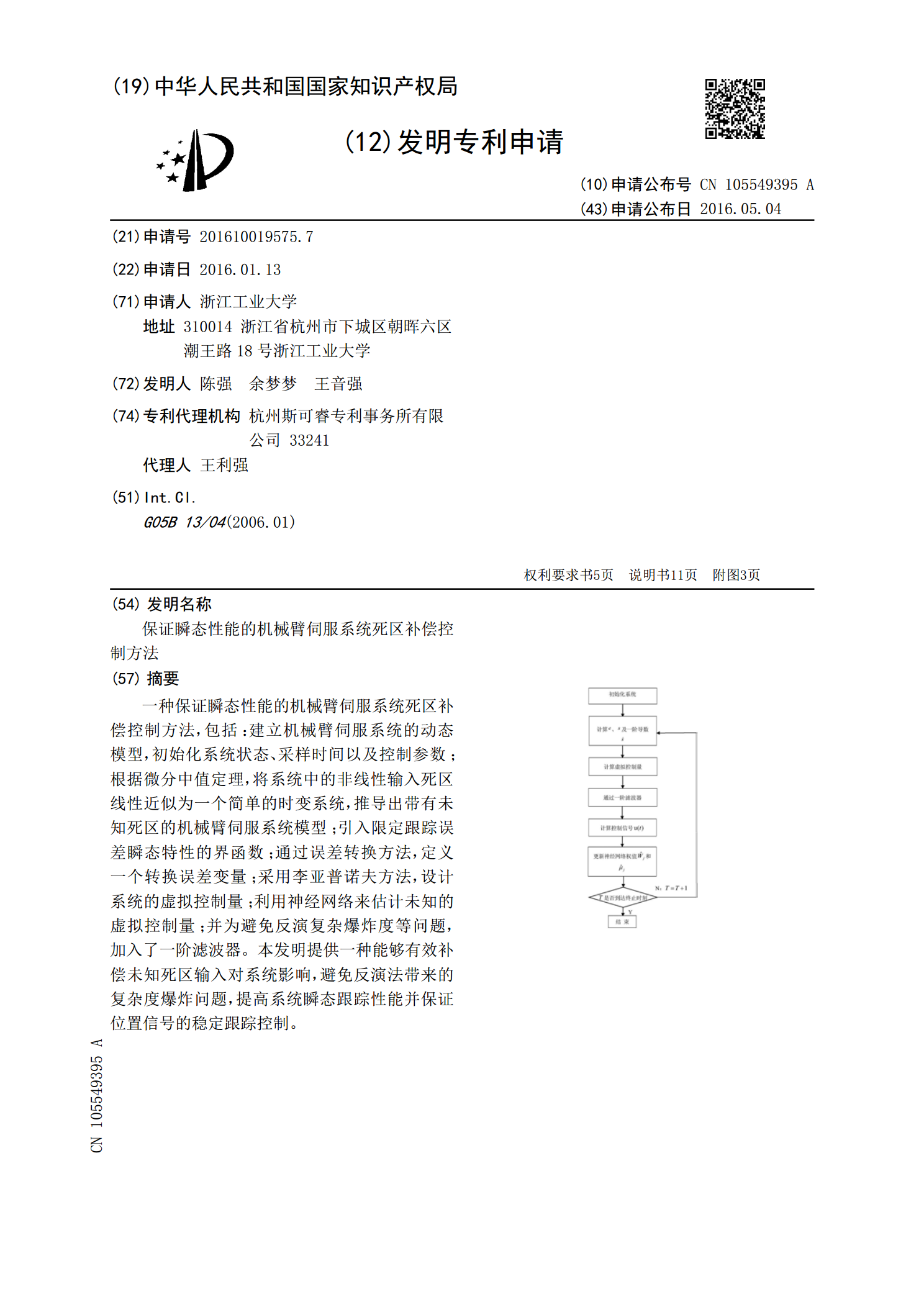
一种保证瞬态性能的机械臂伺服系统死区补偿控制方法,包括:建立机械臂伺服系统的动态模型,初始化系统状态、采样时间以及控制参数;根据微分中值定理,将系统中的非线性输入死区线性近似为一个简单的时变系统,推导出带有未知死区的机械臂伺服系统模型;引入限定跟踪误差瞬态特性的界函数;通过误差转换方法,定义一个转换误差变量;采用李亚普诺夫方法,设计系统的虚拟控制量;利用神经网络来估计未知的虚拟控制量;并为避免反演复杂爆炸度等问题,加入了一阶滤波器。本发明提供一种能够有效补偿未知死区输入对系统影响,避免反演法带来的复杂度爆

基于死区补偿的码垛机械臂控制算法.docx
基于死区补偿的码垛机械臂控制算法基于死区补偿的码垛机械臂控制算法摘要:码垛机械臂是一种常用于物流业中的自动化设备,用于将物体从一个位置堆叠到另一个位置。然而,由于机械臂本身和外部环境的因素,存在一定的死区问题,导致机械臂的运动控制不够准确。为了解决这个问题,本文提出了一种基于死区补偿的码垛机械臂控制算法。该算法通过对死区进行建模,并根据建模结果进行补偿,可以更精确地控制机械臂的运动,提高码垛的准确性和效率。实验结果表明,该算法能够有效地解决死区问题,并显著提升机械臂的控制性能。关键词:码垛机械臂,死区补偿

死区对逆变性能的影响及其补偿方法.docx
死区对逆变性能的影响及其补偿方法死区是指在控制系统中,输入信号小于一个特定的阈值范围时,系统不产生输出变化的现象。死区现象在工业领域中普遍存在,对于逆变器而言,其性能和稳定性影响较大。本文将讨论死区对逆变性能的影响以及补偿方法。首先,让我们了解死区对逆变性能的影响。死区现象会导致逆变器输出的误差和畸变,并且会增加输出电压的噪声。这种误差和畸变会影响逆变器的输出质量和稳定性。在逆变器中,死区通常是由电力开关引起的,当输入电压小于死区大小时,电力开关将不会打开或关闭,从而导致输出电压的变化延迟。死区还会引起逆

多轴机械臂关节伺服系统的控制方法及系统.pdf
本申请提供一种多轴机械臂关节伺服系统的控制方法及系统,应用于机器人及其伺服技术领域,其中控制方法包括构建机械臂中各关节的伺服系统对应的加速度反馈闭环传递函数;从所述机械臂在工作期间容许的负载惯量的变化范围,按预设的选取策略确定各关节的伺服系统对应的负载惯量比R值;根据各轴加速度增益值具有最小增益偏差的约束关系,求解出各关节的伺服系统对应的加速度反馈增益k值;将各关节的伺服系统对应的负载惯量比R值及加速度反馈增益k值,用于该关节的伺服系统对应的所述加速度反馈闭环传递函数中。通过从机械臂整体结构的惯量变化角度

基于SVPWM控制的并网逆变器死区补偿方法.docx
基于SVPWM控制的并网逆变器死区补偿方法摘要随着光伏发电技术的飞速发展,越来越多的光伏并网逆变器被广泛应用于电网中。然而,在逆变器的控制过程中,死区效应会导致输出电压的失真。为了解决这个问题,本文提出了一种基于SVPWM控制的并网逆变器死区补偿方法。该方法在SVPWM控制中引入了死区补偿技术,通过调整逆变器的占空比来消除死区效应,使逆变器输出电压更加稳定。关键词:光伏并网逆变器;SVPWM控制;死区补偿AbstractWiththerapiddevelopmentofphotovoltaicpowerg