
无人飞行器返航方法、返航系统及其无人飞行器.pdf

羽沫****魔王


1/10

2/10

3/10
4/10
5/10
6/10
7/10
8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
无人飞行器返航方法、返航系统及其无人飞行器.pdf
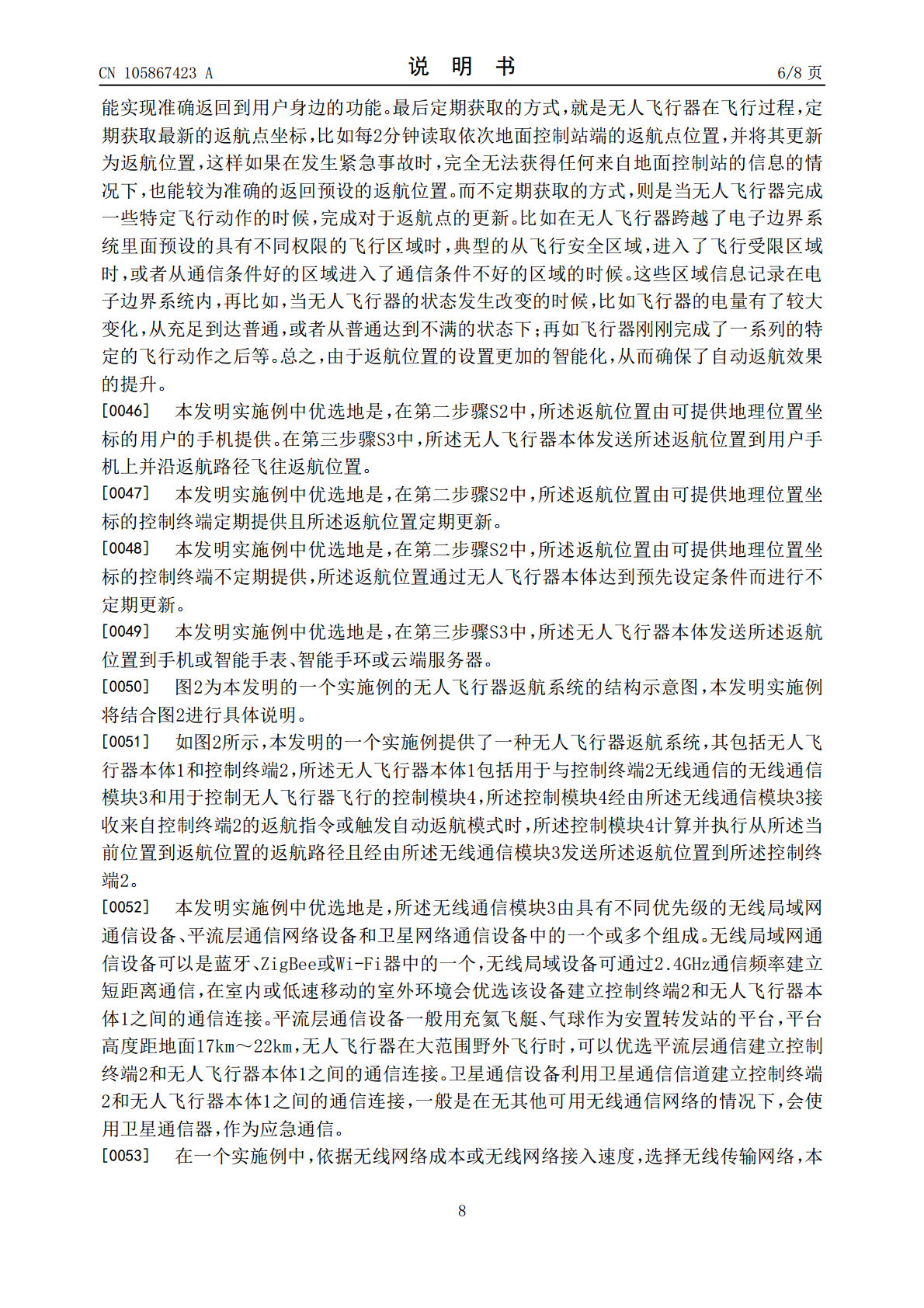
一种无人飞行器返航方法、返航系统及其无人飞行器,无人飞行器返航系统包括无人飞行器本体(1)和控制终端(2),所述无人飞行器本体(1)包括用于与控制终端(2)无线通信的无线通信模块(3)和用于控制无人飞行器飞行的控制模块(4),所述控制模块(4)经由所述无线通信模块(3)接收来自控制终端(2)的返航指令或触发自动返航模式,所述控制模块(4)计算并执行从所述当前位置到返航位置的返航路径且经由所述无线通信模块(3)发送所述返航位置到所述控制终端(2)。在返航方法中,所述无人飞行器本体发送所述返航位置到用户并沿返

无人飞行器退避系统、无人飞行器退避方法和程序.pdf
在利用无人飞行器提供与竞技或活动的召开场所有关的信息的情况下,不会妨碍参加者。无人飞行器退避系统(1)的参加者位置信息取得单元(51)取得与竞技或活动的召开场所中的参加者的位置有关的参加者位置信息。移动指示单元(52)指示无人飞行器向根据参加者位置信息确定的位置移动,该无人飞行器用于提供与召开场所有关的信息。布局信息取得单元(53)取得与召开场所的布局有关的布局信息。退避地确定单元(54)根据参加者位置信息和布局信息确定无人飞行器的退避地。退避单元(56)使无人飞行器退避到由退避地确定单元确定的退避地。

无人飞行器控制系统、无人飞行器控制方法、及程序.pdf
本发明确保无人飞行器飞行时的稳定性。无人飞行器控制系统(1)的第1获取设备(101)获取第1信息,该第1信息是用来使飞行中的无人飞行器(10)动作的信息、与无人飞行器(10)的动作的检测结果相关的信息中的至少一个。第2获取设备(102)获取第2信息,用于在无人飞行器(10)的控制切换后,使无人飞行器(10)动作。飞行控制设备(104)基于第1信息及第2信息,对切换为基于第2信息控制无人飞行器(10)进行限制。
用于控制无人飞行器的系统及其方法.pdf
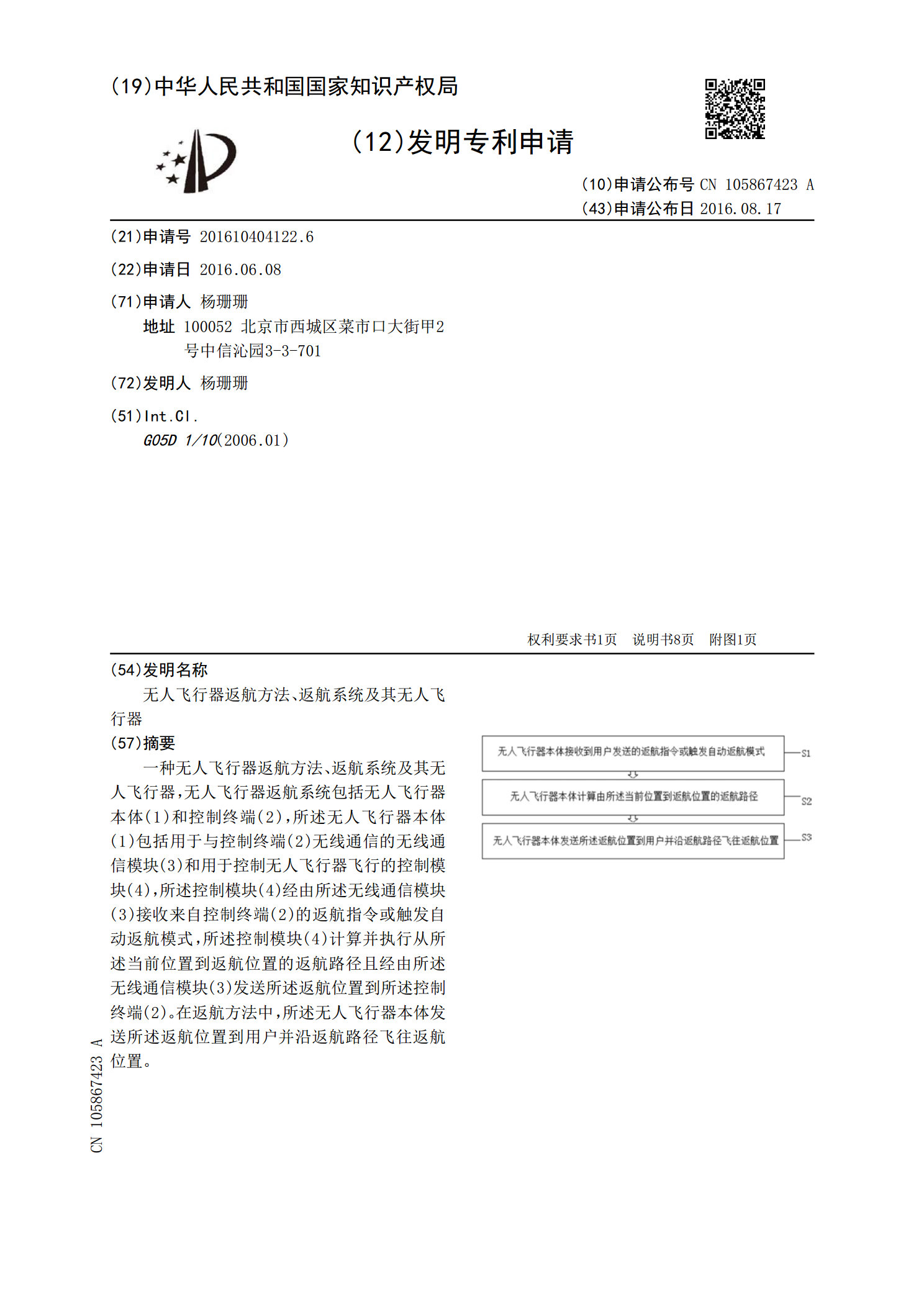
一种用于控制无人飞行器的系统及其方法,该系统可以控制为从车辆接收出发点和目的地;并且将与出发点和目的地之间的阴影区域有关的信息发送至无人飞行器,以控制无人飞行器测量阴影区域中的每个海拔的通信灵敏度。
一种无人飞行器控制方法、系统、无人飞行器及介质.pdf
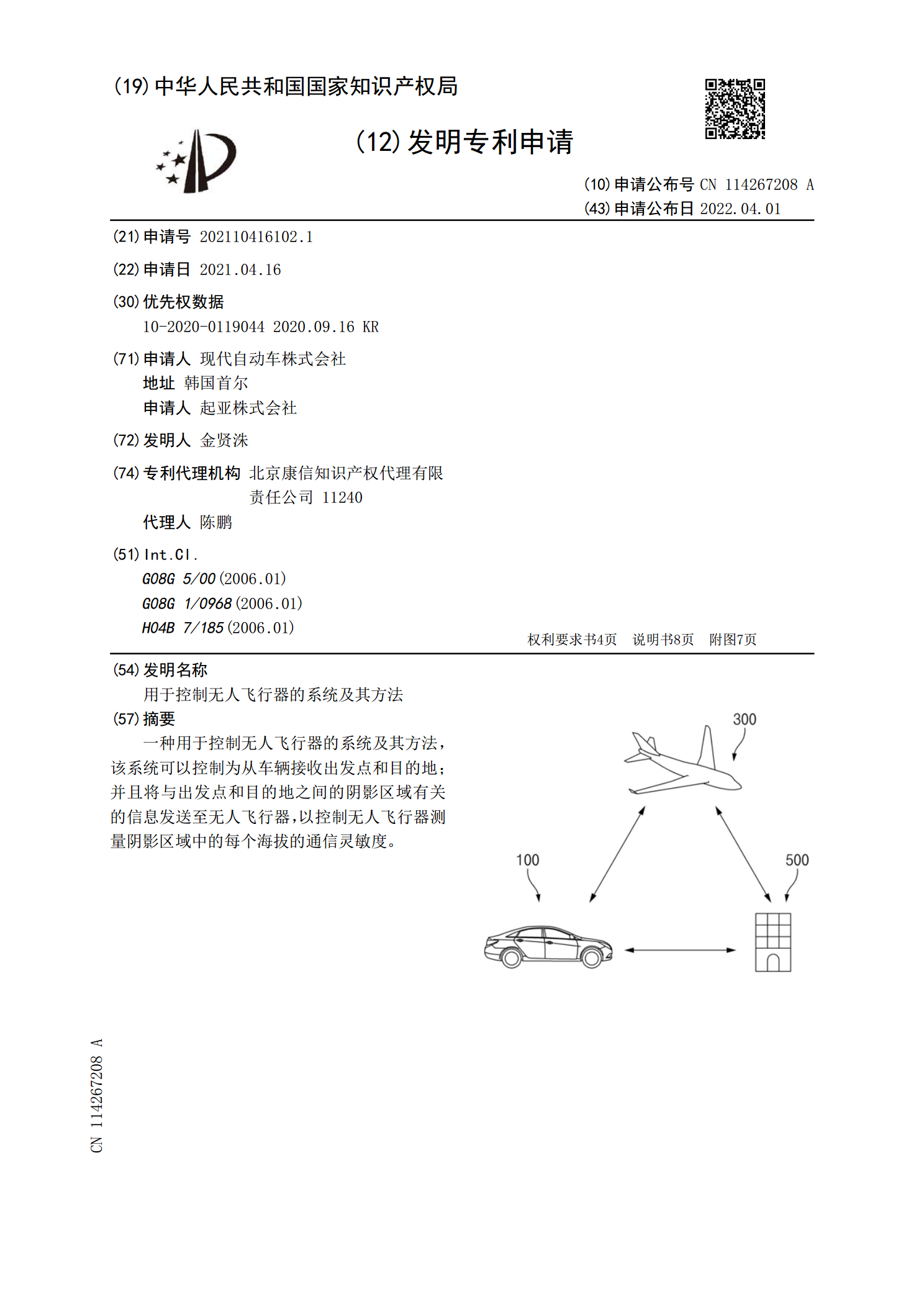
本申请实施例涉及无人飞行器领域,公开了一种无人飞行器控制方法、系统、无人飞行器及介质。其中,所述方法包括:在无人飞行器接收到返航指令时,基于停机坪的位置信息和无人飞行器的第一当前位置信息规划飞行路线;无人飞行器控制雷达发射雷达信号,且根据飞行路线飞行;无人飞行器通过雷达接收引导装置反射的雷达信号;如果雷达信号的强度达到目标信号强度,则无人飞行器根据回波信息沿着飞行路线向停机坪飞行,直到无人飞行器降落在停机坪上。无人飞行器在停机坪起降,使得无人飞行器的起降更方便,解决特殊环境如夜间大雾、沙尘等视线不好的情况