
无人飞行器控制系统、无人飞行器控制方法、及程序.pdf

一条****彩妍


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共41页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

无人飞行器控制系统、无人飞行器控制方法、及程序.pdf
本发明确保无人飞行器飞行时的稳定性。无人飞行器控制系统(1)的第1获取设备(101)获取第1信息,该第1信息是用来使飞行中的无人飞行器(10)动作的信息、与无人飞行器(10)的动作的检测结果相关的信息中的至少一个。第2获取设备(102)获取第2信息,用于在无人飞行器(10)的控制切换后,使无人飞行器(10)动作。飞行控制设备(104)基于第1信息及第2信息,对切换为基于第2信息控制无人飞行器(10)进行限制。

无人飞行器、飞行器控制系统及搬运方法.pdf
本发明提供一种能容易地将搬运物连接到从飞行主体垂下的线状构件的前端部的无人飞行器。本发明的一个形态的无人飞行器(1)具备:飞行主体(2),能飞行;卷扬机(3),设置于所述飞行主体(2),能卷放及卷取线状构件(31);吸附构件(4),设置于所述线状构件(31)的前端部,在与设置于搬运物(T)的具有铁磁性的被吸附部(F)之间产生磁性吸引力;以及保持机构(5),在所述吸附构件(4)与所述被吸附部(F)通过所述磁性吸引力而结合的状态下保持所述搬运物(T)。

无人飞行器退避系统、无人飞行器退避方法和程序.pdf
在利用无人飞行器提供与竞技或活动的召开场所有关的信息的情况下,不会妨碍参加者。无人飞行器退避系统(1)的参加者位置信息取得单元(51)取得与竞技或活动的召开场所中的参加者的位置有关的参加者位置信息。移动指示单元(52)指示无人飞行器向根据参加者位置信息确定的位置移动,该无人飞行器用于提供与召开场所有关的信息。布局信息取得单元(53)取得与召开场所的布局有关的布局信息。退避地确定单元(54)根据参加者位置信息和布局信息确定无人飞行器的退避地。退避单元(56)使无人飞行器退避到由退避地确定单元确定的退避地。
一种无人飞行器飞行控制方法、系统及无人飞行器.pdf
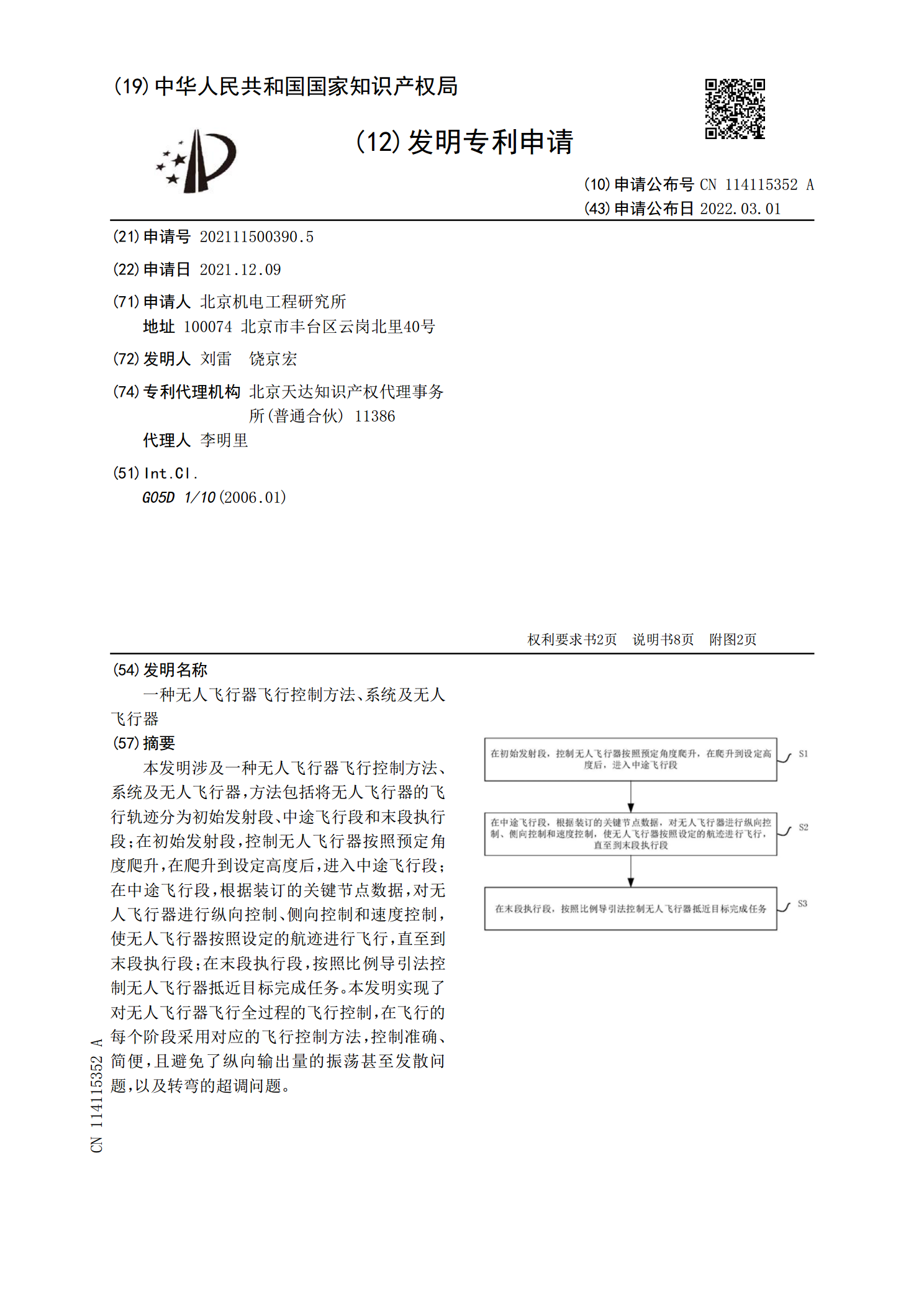
本发明涉及一种无人飞行器飞行控制方法、系统及无人飞行器,方法包括将无人飞行器的飞行轨迹分为初始发射段、中途飞行段和末段执行段;在初始发射段,控制无人飞行器按照预定角度爬升,在爬升到设定高度后,进入中途飞行段;在中途飞行段,根据装订的关键节点数据,对无人飞行器进行纵向控制、侧向控制和速度控制,使无人飞行器按照设定的航迹进行飞行,直至到末段执行段;在末段执行段,按照比例导引法控制无人飞行器抵近目标完成任务。本发明实现了对无人飞行器飞行全过程的飞行控制,在飞行的每个阶段采用对应的飞行控制方法,控制准确、简便,且

一种无人飞行器的控制方法、无人飞行器及存储介质.pdf
一种无人飞行器的控制方法、无人飞行器及存储介质,其中,该方法包括:根据无人飞行器的传感器输出的传感数据确定障碍物与无人飞行器之间的距离(S201);当距离小于或等于预设距离阈值时,控制无人飞行器执行展示工作任务(S202),其中,无人飞行器不处于飞行状态,展示工作任务包括无人飞行器的指示灯按照预设模式工作,和/或无人飞行器的动力部件怠速工作。该方法可以在确保安全的基础上,增加无人飞行器和用户之间的互动乐趣,以达到吸引用户注意力的目的。