
一种电动汽车的EMB控制系统及其控制方法.pdf

篷璐****爱吗


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共27页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种电动汽车的EMB控制系统及其控制方法.pdf
本发明提供了一种电动汽车的EMB控制系统及其控制方法,旨在解决传统的制动系统多采用气、液、机械混合制动方式,制动反应慢的问题。一种电动汽车的EMB控制系统,包括CAN总线、一级节点控制系统和四个二级节点控制系统,四个二级节点控制系统分别用于控制四个车轮的制动。一级节点控制系统包括电子制动踏板、信号采集模块、一级微控制器和一级CAN总线收发器。二级节点控制系统包括二级CAN总线收发器、二级微控制器、驱动单元和执行器电机;二级CAN总线收发器通过CAN总线接收一级CAN总线收发器发出的控制信号。采用本发明电驱

一种电动汽车的电机控制方法及其控制系统.pdf
本发明提供了一种电动汽车的电机控制方法,所述电动汽车包括:电机、离合器、变速箱和车轮,电机和变速箱通过离合器相连,变速箱还与车轮相连,其中,所述电机控制方法包括:在电动汽车正常行驶时对电机进行扭矩控制;在电动汽车换档时对电机进行转速控制。本发明还提供了一种电动汽车的电机控制系统。本发明的一种电动汽车的电机控制方法及其控制系统,通过在电动汽车正常行驶时对电机进行扭矩控制;在电动汽车换档时对电机进行转速控制,从而可以在换档时将电机的转速控制在一定的范围内而不会出现电机转速失控的现象进而造成飞车事故,因此本发明

一种增程式电动汽车控制系统及其控制方法.pdf
本发明公开了一种增程式电动汽车增程器控制系统及整车控制系统,包括一台传统节气门控制的发动机、发动机曲轴一体连接的集驱动和发电功能一体的发电机、车载动力电池、整车控制器、增程器控制器、电池管理系统、电池直流电流传感器、发动机控制器、发电机控制器、发电机端直流电流传感器、永磁同步驱动电机与动力电池和发电机一起连接在动力线用于驱动车轮、电机控制器、电机直流电流传感器、节气门、曲轴位置传感器,增程器控制器与发动机控制器和发电机控制器进行通讯,发送控制指令,增程器控制器根据驾驶员需求和增程器系统的状态进行发电功率能

一种电动汽车智能驱动控制系统及其驱动控制方法.pdf
本发明涉及一种电动汽车智能驱动控制系统及驱动控制方法,所述电动汽车包括加速踏板、制动踏板、两个驱动轴、安装在两个驱动轴两端上的带有各自驱动电机的四个电动轮,所述电动汽车智能驱动控制系统包括整车控制器以及分别与整车控制器连接的制动系统控制器、制动踏板角度传感器、加速踏板角度传感器、前测距传感器、后测距传感器、四个轮速传感器和四个驱动电机控制器;本发明驱动控制方法是根据加速踏板角度,自动调整电动汽车单轴或两轴驱动,或自动调整加速度、减速度的大小,或自动判断电动轮汽车是否陷入诸如沙坑、油污路面、塌陷地类的低附着
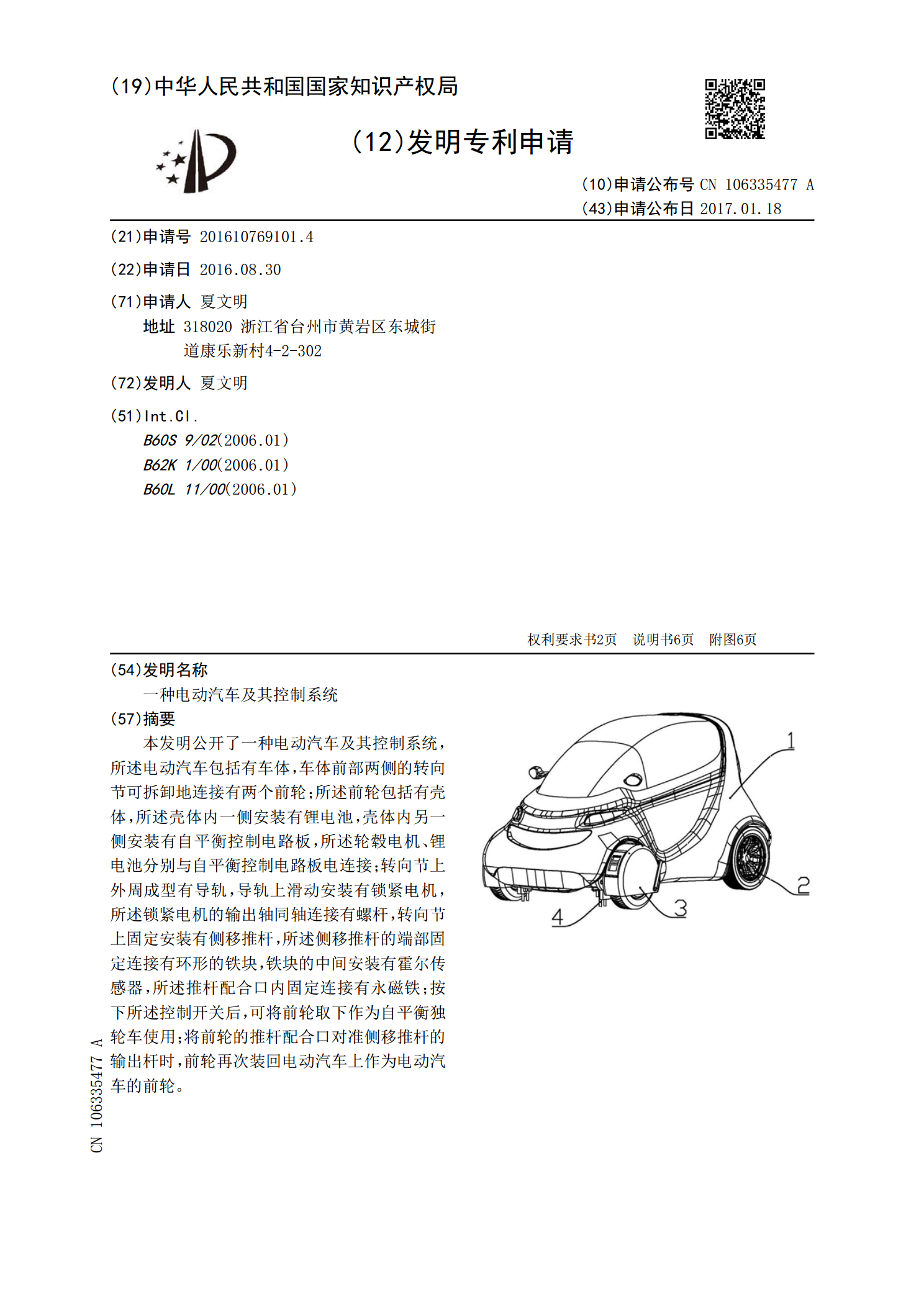
一种电动汽车及其控制系统.pdf
本发明公开了一种电动汽车及其控制系统,所述电动汽车包括有车体,车体前部两侧的转向节可拆卸地连接有两个前轮;所述前轮包括有壳体,所述壳体内一侧安装有锂电池,壳体内另一侧安装有自平衡控制电路板,所述轮毂电机、锂电池分别与自平衡控制电路板电连接;转向节上外周成型有导轨,导轨上滑动安装有锁紧电机,所述锁紧电机的输出轴同轴连接有螺杆,转向节上固定安装有侧移推杆,所述侧移推杆的端部固定连接有环形的铁块,铁块的中间安装有霍尔传感器,所述推杆配合口内固定连接有永磁铁;按下所述控制开关后,可将前轮取下作为自平衡独轮车使用;