
无人船任意路径的追踪控制方法.pdf

猫巷****盟主

1/10
2/10
3/10
4/10

5/10
6/10

7/10
8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
无人船任意路径的追踪控制方法.pdf
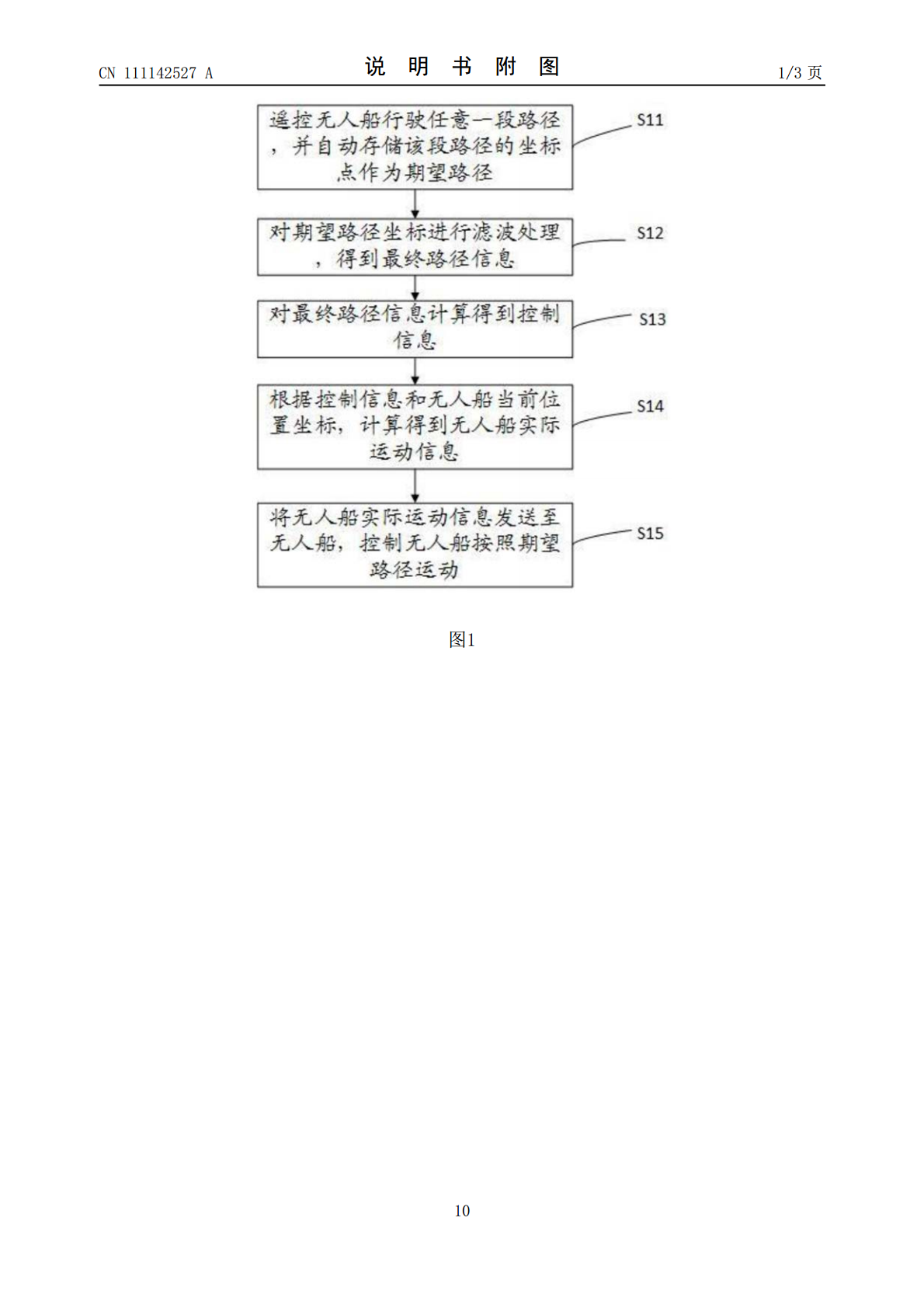
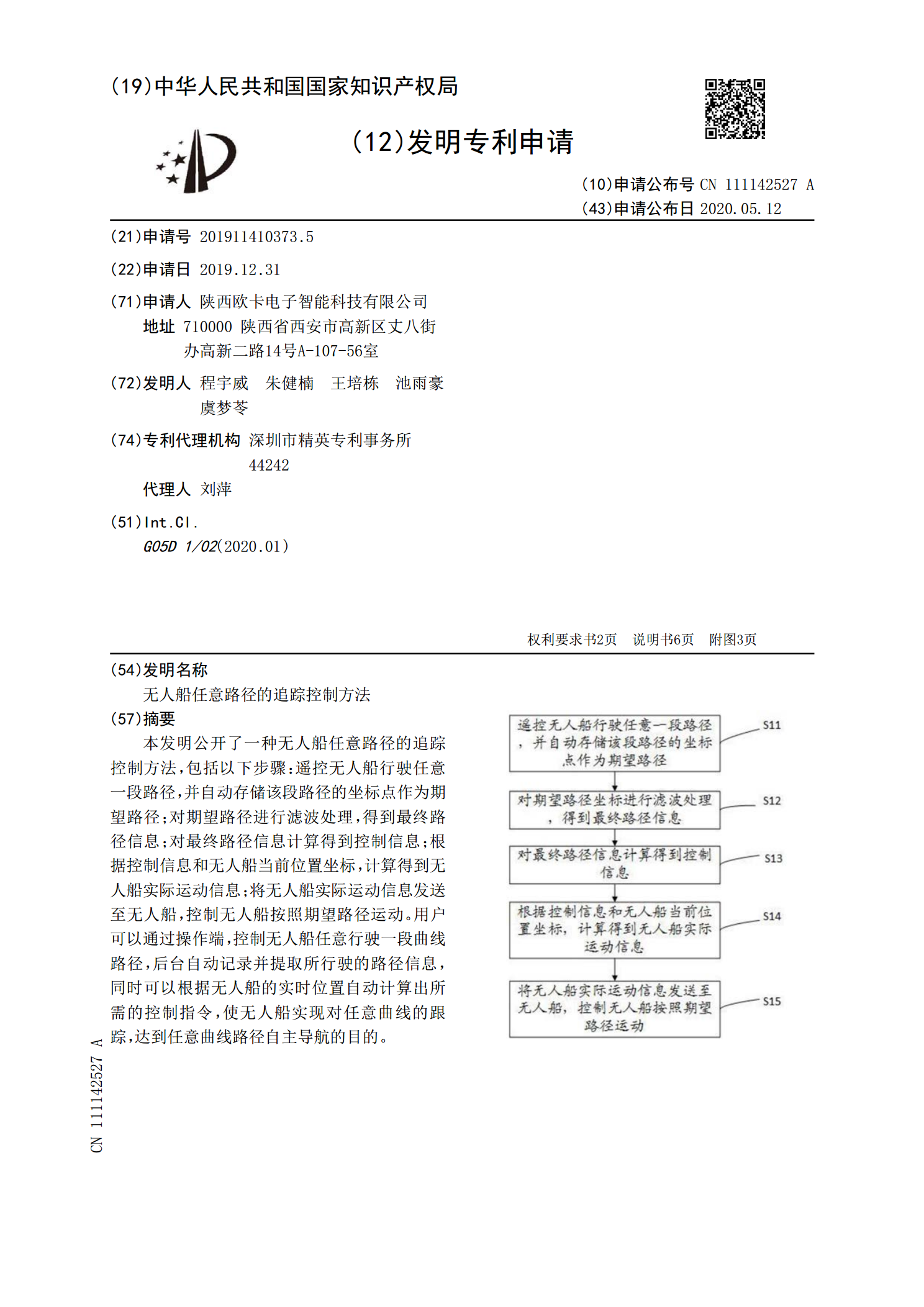
本发明公开了一种无人船任意路径的追踪控制方法,包括以下步骤:遥控无人船行驶任意一段路径,并自动存储该段路径的坐标点作为期望路径;对期望路径进行滤波处理,得到最终路径信息;对最终路径信息计算得到控制信息;根据控制信息和无人船当前位置坐标,计算得到无人船实际运动信息;将无人船实际运动信息发送至无人船,控制无人船按照期望路径运动。用户可以通过操作端,控制无人船任意行驶一段曲线路径,后台自动记录并提取所行驶的路径信息,同时可以根据无人船的实时位置自动计算出所需的控制指令,使无人船实现对任意曲线的跟踪,达到任意曲线
无人船轨迹追踪控制方法和装置.pdf
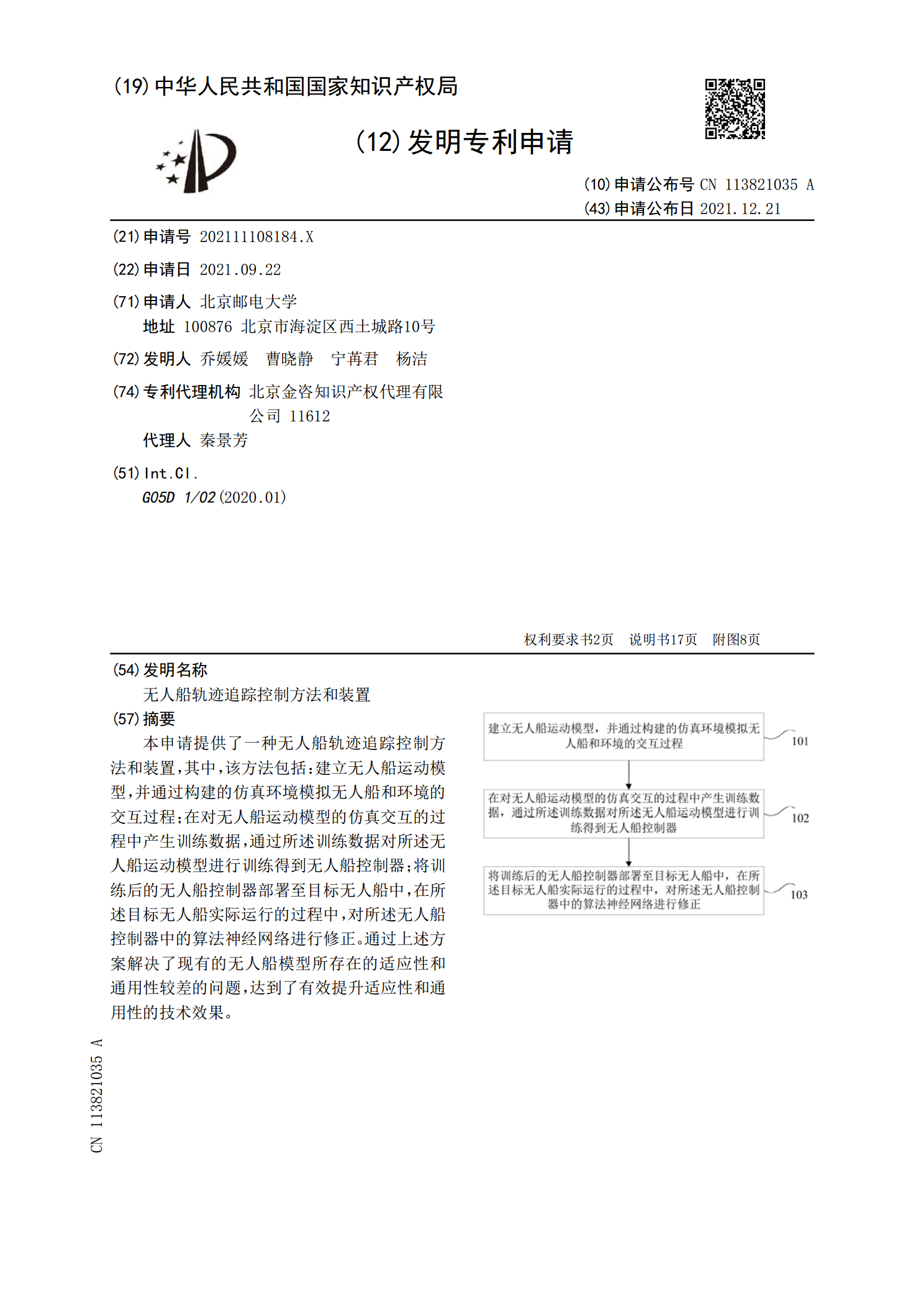
本申请提供了一种无人船轨迹追踪控制方法和装置,其中,该方法包括:建立无人船运动模型,并通过构建的仿真环境模拟无人船和环境的交互过程;在对无人船运动模型的仿真交互的过程中产生训练数据,通过所述训练数据对所述无人船运动模型进行训练得到无人船控制器;将训练后的无人船控制器部署至目标无人船中,在所述目标无人船实际运行的过程中,对所述无人船控制器中的算法神经网络进行修正。通过上述方案解决了现有的无人船模型所存在的适应性和通用性较差的问题,达到了有效提升适应性和通用性的技术效果。

无人船路径跟随控制方法综述.docx
无人船路径跟随控制方法综述无人船路径跟随控制方法综述摘要:无人船路径跟随控制是无人船自主航行的关键技术之一,其主要目标是使无人船能够按照预定的航线自主航行,并能在遇到障碍物或变化的环境中做出相应的调整,以保证航行的安全和稳定。本论文将综述当前无人船路径跟随控制方法的研究现状和发展趋势,包括基于经典控制方法、模型预测控制方法、模糊控制方法和深度学习方法等。一、引言无人船是指没有船员操控的船只,其自主航行技术已经取得了长足的发展。路径跟随控制是无人船自主航行的核心技术,主要包括路径规划和路径跟随两个方面。路径
无人船路径规划方法及系统.pdf
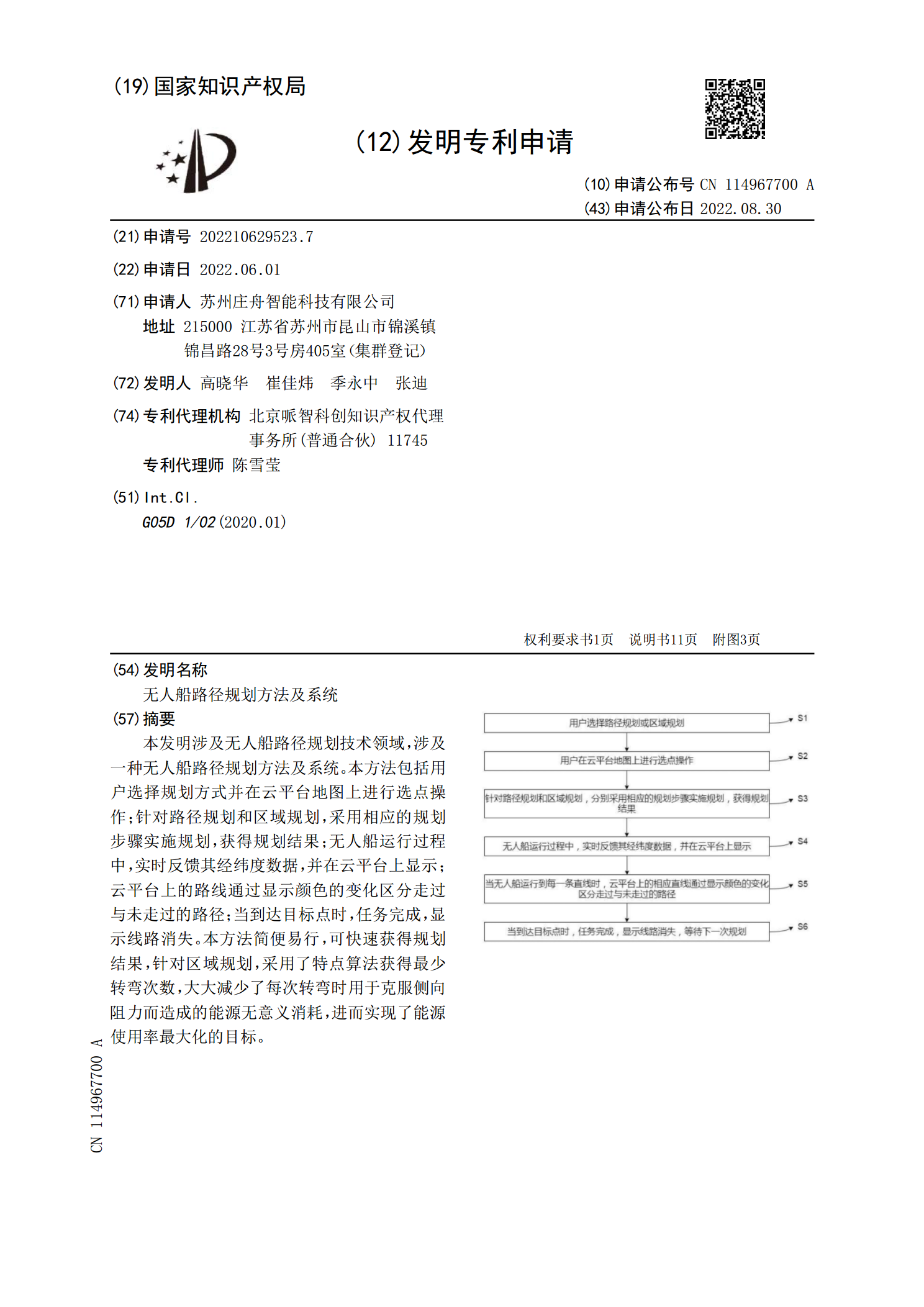
本发明涉及无人船路径规划技术领域,涉及一种无人船路径规划方法及系统。本方法包括用户选择规划方式并在云平台地图上进行选点操作;针对路径规划和区域规划,采用相应的规划步骤实施规划,获得规划结果;无人船运行过程中,实时反馈其经纬度数据,并在云平台上显示;云平台上的路线通过显示颜色的变化区分走过与未走过的路径;当到达目标点时,任务完成,显示线路消失。本方法简便易行,可快速获得规划结果,针对区域规划,采用了特点算法获得最少转弯次数,大大减少了每次转弯时用于克服侧向阻力而造成的能源无意义消耗,进而实现了能源使用率最大

针对多域协调的水下无人船路径规划及轨迹追踪研究.docx
针对多域协调的水下无人船路径规划及轨迹追踪研究针对多域协调的水下无人船路径规划及轨迹追踪研究摘要:水下无人船作为一种新兴的水下探测工具,在海洋资源开发、环境监测、搜索救援等领域具有广阔的应用前景。然而,水下无人船的路径规划和轨迹追踪问题是实现其自主导航和避障能力的关键。尤其在多域协调的情况下,路径规划和轨迹追踪更显复杂和有挑战性。本文基于多域协调的水下无人船路径规划和轨迹追踪问题展开研究,提出了一种综合考虑环境特征和任务要求的路径规划和轨迹追踪方法,通过实验验证了该方法的有效性和性能。1.引言水下无人船是