
无人船路径跟随控制方法综述.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

无人船路径跟随控制方法综述.docx
无人船路径跟随控制方法综述无人船路径跟随控制方法综述摘要:无人船路径跟随控制是无人船自主航行的关键技术之一,其主要目标是使无人船能够按照预定的航线自主航行,并能在遇到障碍物或变化的环境中做出相应的调整,以保证航行的安全和稳定。本论文将综述当前无人船路径跟随控制方法的研究现状和发展趋势,包括基于经典控制方法、模型预测控制方法、模糊控制方法和深度学习方法等。一、引言无人船是指没有船员操控的船只,其自主航行技术已经取得了长足的发展。路径跟随控制是无人船自主航行的核心技术,主要包括路径规划和路径跟随两个方面。路径
无人船任意路径的追踪控制方法.pdf
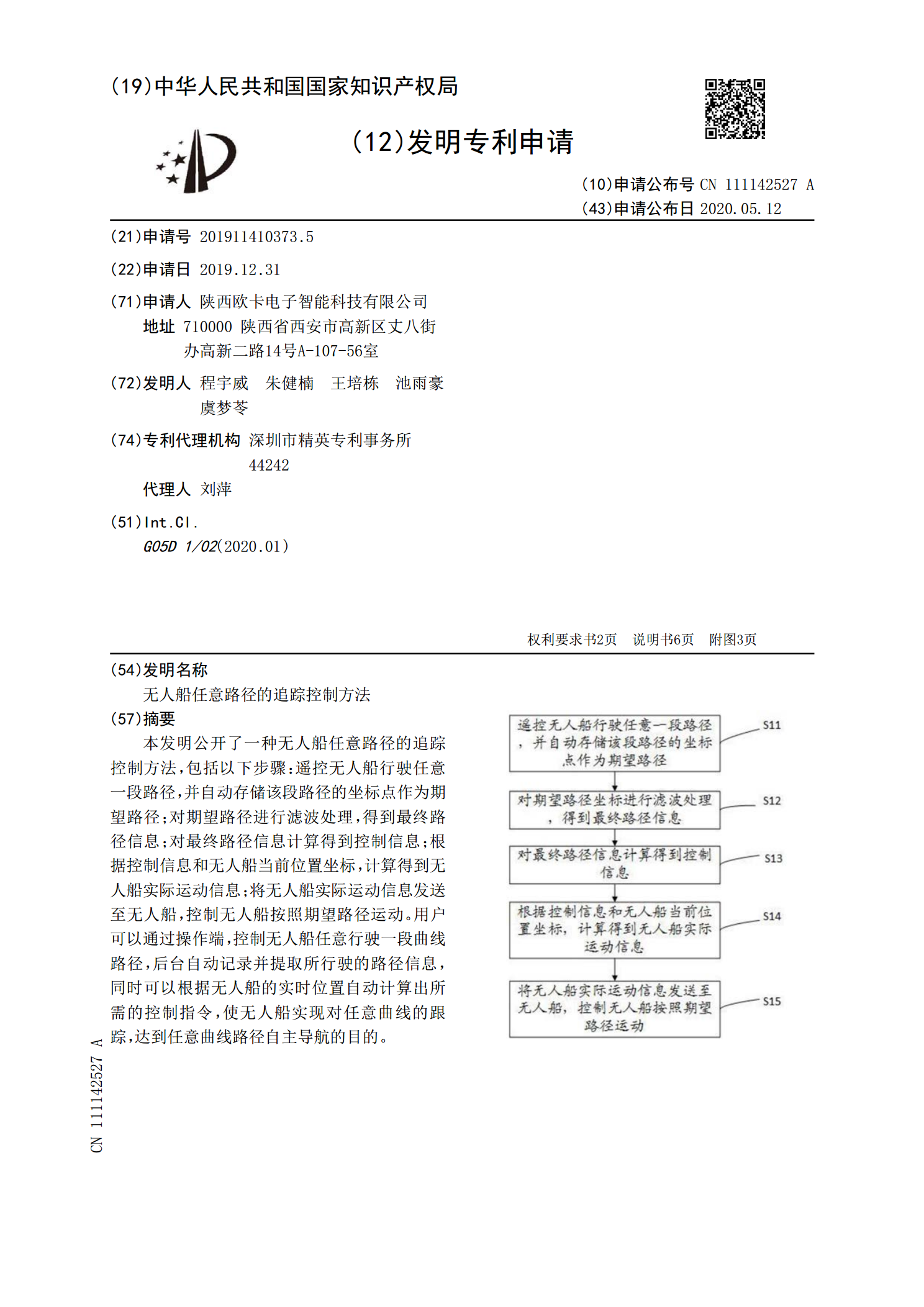
本发明公开了一种无人船任意路径的追踪控制方法,包括以下步骤:遥控无人船行驶任意一段路径,并自动存储该段路径的坐标点作为期望路径;对期望路径进行滤波处理,得到最终路径信息;对最终路径信息计算得到控制信息;根据控制信息和无人船当前位置坐标,计算得到无人船实际运动信息;将无人船实际运动信息发送至无人船,控制无人船按照期望路径运动。用户可以通过操作端,控制无人船任意行驶一段曲线路径,后台自动记录并提取所行驶的路径信息,同时可以根据无人船的实时位置自动计算出所需的控制指令,使无人船实现对任意曲线的跟踪,达到任意曲线

时变大漂角欠驱动无人船路径跟随控制研究的开题报告.docx
时变大漂角欠驱动无人船路径跟随控制研究的开题报告一、研究背景和意义大漂角欠驱动无人船是一种新型的水面无人船,其本质是一种具有运动约束的非完整力学系统。该系统具有非线性、强耦合等特点,因此其控制问题十分复杂。而无人船的路径跟随控制是无人船自主导航和自主控制的关键技术之一。因此,开展大漂角欠驱动无人船路径跟随控制研究具有重要的理论与应用价值,可以为航行控制提供实际指导和技术支持。二、研究内容和目标1.研究内容本文主要研究大漂角欠驱动无人船的路径跟随控制问题,具体包括以下几个方面:(1)通过对大漂角欠驱动无人船
无人船路径规划方法及系统.pdf
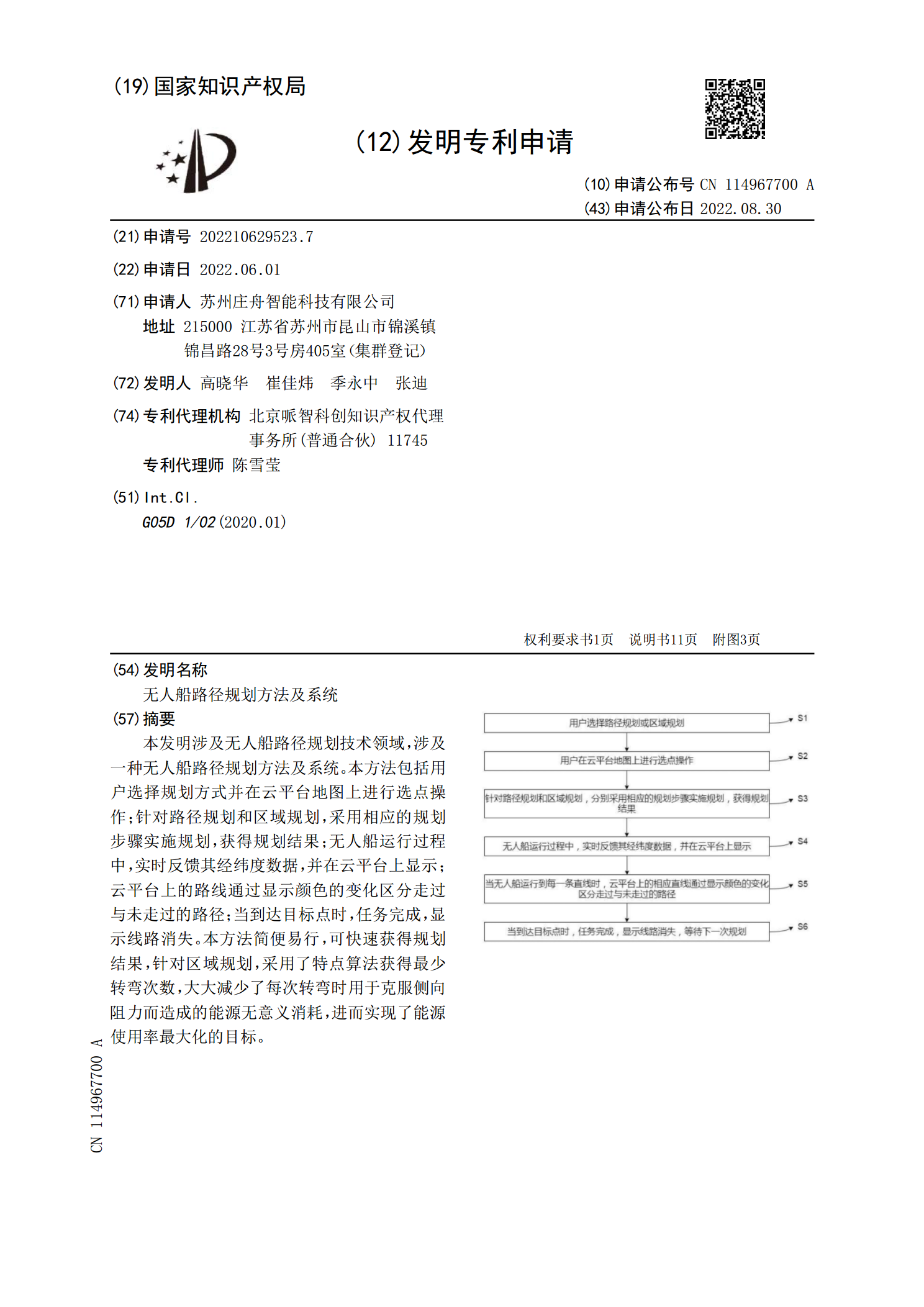
本发明涉及无人船路径规划技术领域,涉及一种无人船路径规划方法及系统。本方法包括用户选择规划方式并在云平台地图上进行选点操作;针对路径规划和区域规划,采用相应的规划步骤实施规划,获得规划结果;无人船运行过程中,实时反馈其经纬度数据,并在云平台上显示;云平台上的路线通过显示颜色的变化区分走过与未走过的路径;当到达目标点时,任务完成,显示线路消失。本方法简便易行,可快速获得规划结果,针对区域规划,采用了特点算法获得最少转弯次数,大大减少了每次转弯时用于克服侧向阻力而造成的能源无意义消耗,进而实现了能源使用率最大

无人驾驶汽车的路径规划与跟随控制算法研究.docx
无人驾驶汽车的路径规划与跟随控制算法研究无人驾驶汽车的路径规划与跟随控制算法研究摘要:随着科技的不断发展,无人驾驶汽车正逐渐成为未来交通领域的热门研究方向。路径规划与跟随控制算法是无人驾驶汽车实现自主导航的核心技术。本论文将对路径规划和跟随控制算法进行深入研究,并探讨各种路径规划和跟随控制算法在无人驾驶汽车领域的应用。第一章:引言1.1无人驾驶汽车的背景1.2研究目的和意义第二章:路径规划算法的研究进展2.1路径规划算法的基本原理2.2最短路径算法2.3A*算法2.4Dijkstra算法2.5RRT算法2