
无人船轨迹追踪控制方法和装置.pdf

努力****振宇

1/10
2/10

3/10

4/10
5/10
6/10
7/10
8/10

9/10
10/10
亲,该文档总共28页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
无人船轨迹追踪控制方法和装置.pdf
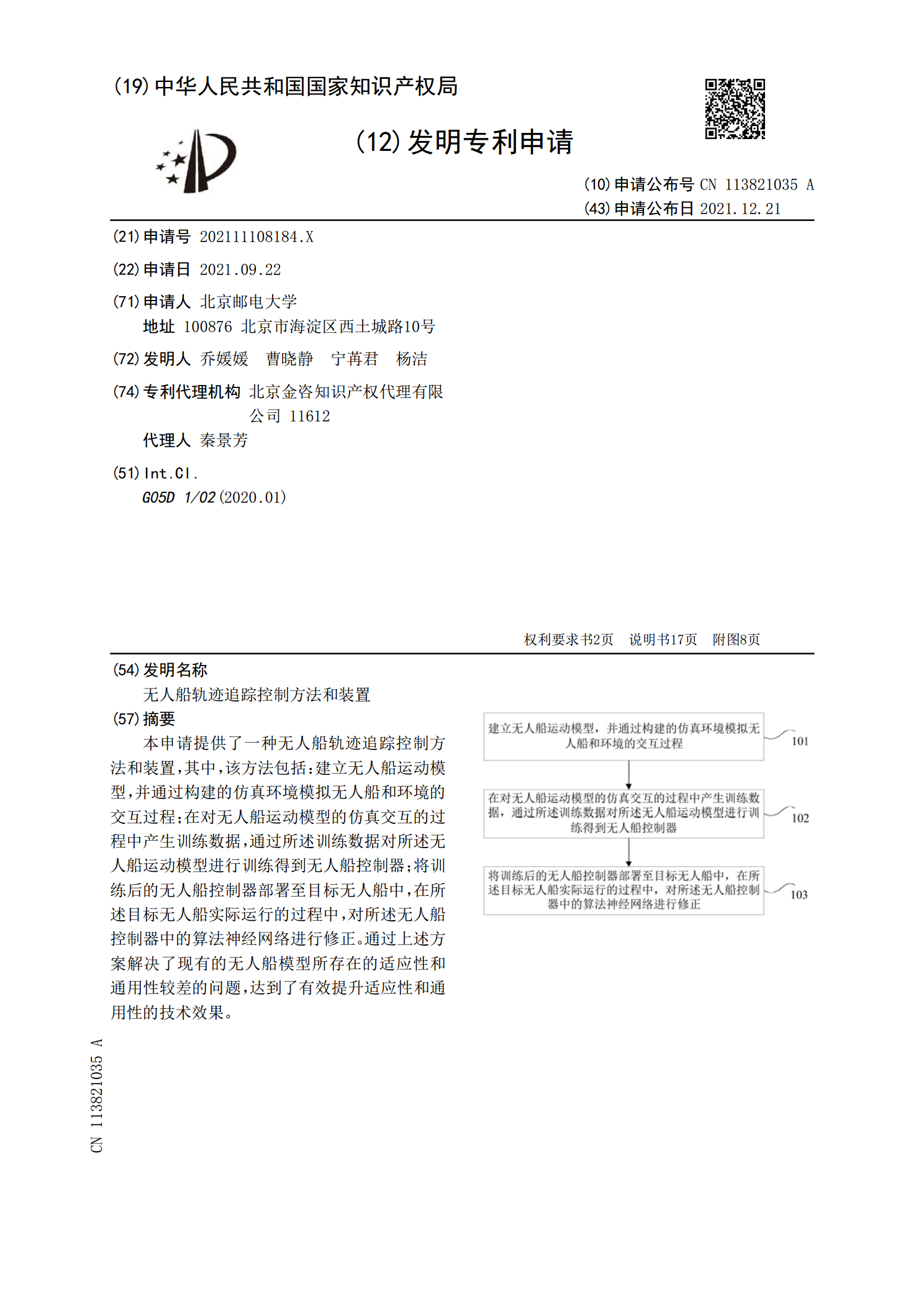
本申请提供了一种无人船轨迹追踪控制方法和装置,其中,该方法包括:建立无人船运动模型,并通过构建的仿真环境模拟无人船和环境的交互过程;在对无人船运动模型的仿真交互的过程中产生训练数据,通过所述训练数据对所述无人船运动模型进行训练得到无人船控制器;将训练后的无人船控制器部署至目标无人船中,在所述目标无人船实际运行的过程中,对所述无人船控制器中的算法神经网络进行修正。通过上述方案解决了现有的无人船模型所存在的适应性和通用性较差的问题,达到了有效提升适应性和通用性的技术效果。
无人船任意路径的追踪控制方法.pdf
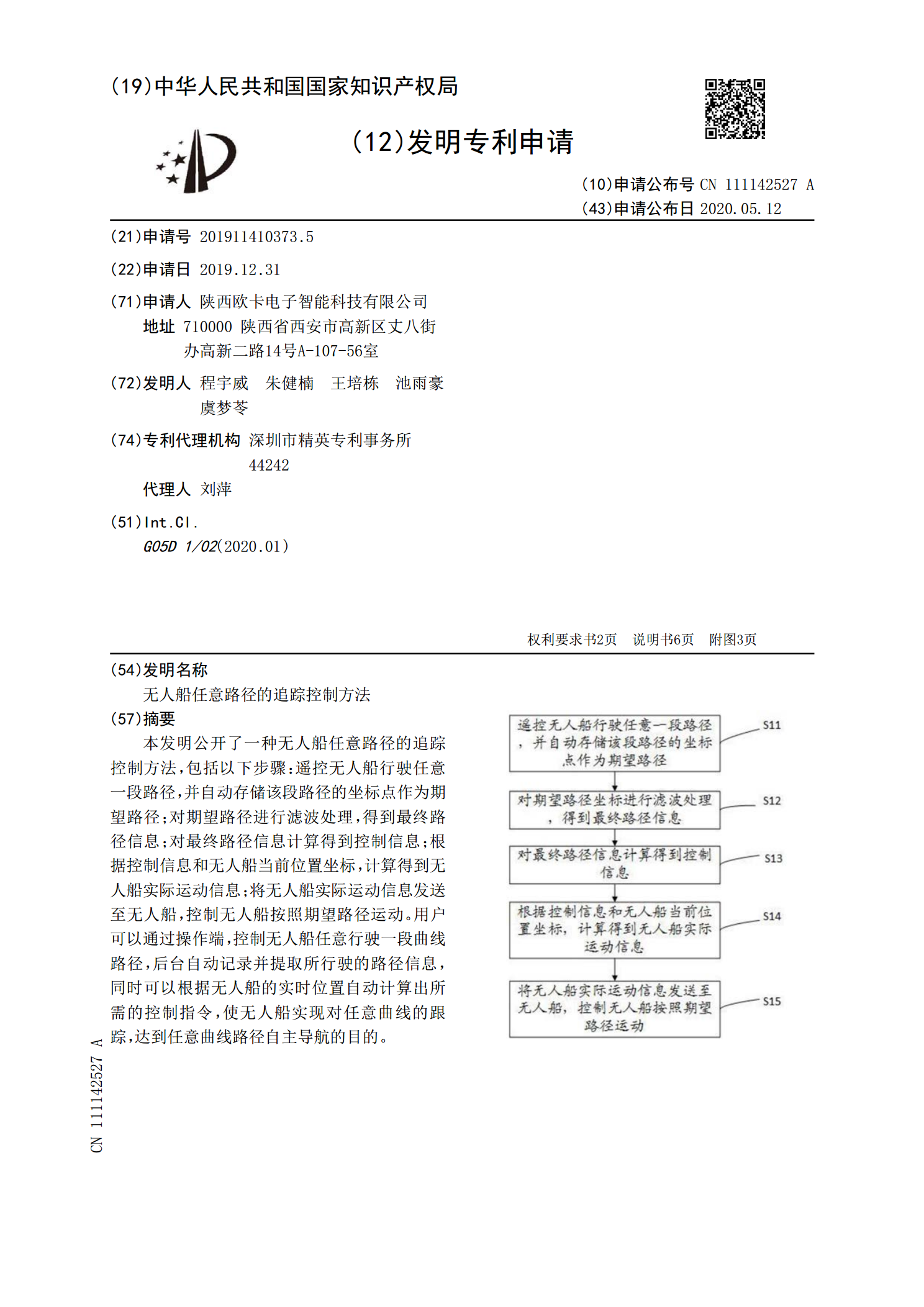
本发明公开了一种无人船任意路径的追踪控制方法,包括以下步骤:遥控无人船行驶任意一段路径,并自动存储该段路径的坐标点作为期望路径;对期望路径进行滤波处理,得到最终路径信息;对最终路径信息计算得到控制信息;根据控制信息和无人船当前位置坐标,计算得到无人船实际运动信息;将无人船实际运动信息发送至无人船,控制无人船按照期望路径运动。用户可以通过操作端,控制无人船任意行驶一段曲线路径,后台自动记录并提取所行驶的路径信息,同时可以根据无人船的实时位置自动计算出所需的控制指令,使无人船实现对任意曲线的跟踪,达到任意曲线

轨迹追踪方法、装置及系统.pdf
本公开是关于一种轨迹追踪方法、装置及系统。该方法应用于第一跟随终端,包括:获取目标轨迹图;获取所述第一跟随终端的当前位置;确定所述目标轨迹图上的参考位置与所述第一跟随终端的当前位置之间的距离是否大于或等于第一预设阈值;若所述参考位置与所述当前位置之间的距离大于或等于第一预设阈值,展示第一提示信息。该技术方案中,若行进过程中跟随用户无法通过查看目标轨迹图修正行进路线时,第一跟随终端可以实时确定当前位置与目标路线的偏移程度,并在偏移较大时显示第一提示信息,便于跟随用户及时调整路线,提高了用户出行的安全性,进而

针对多域协调的水下无人船路径规划及轨迹追踪研究.docx
针对多域协调的水下无人船路径规划及轨迹追踪研究针对多域协调的水下无人船路径规划及轨迹追踪研究摘要:水下无人船作为一种新兴的水下探测工具,在海洋资源开发、环境监测、搜索救援等领域具有广阔的应用前景。然而,水下无人船的路径规划和轨迹追踪问题是实现其自主导航和避障能力的关键。尤其在多域协调的情况下,路径规划和轨迹追踪更显复杂和有挑战性。本文基于多域协调的水下无人船路径规划和轨迹追踪问题展开研究,提出了一种综合考虑环境特征和任务要求的路径规划和轨迹追踪方法,通过实验验证了该方法的有效性和性能。1.引言水下无人船是
无人矿车的轨迹跟踪控制方法、装置、设备及存储介质.pdf
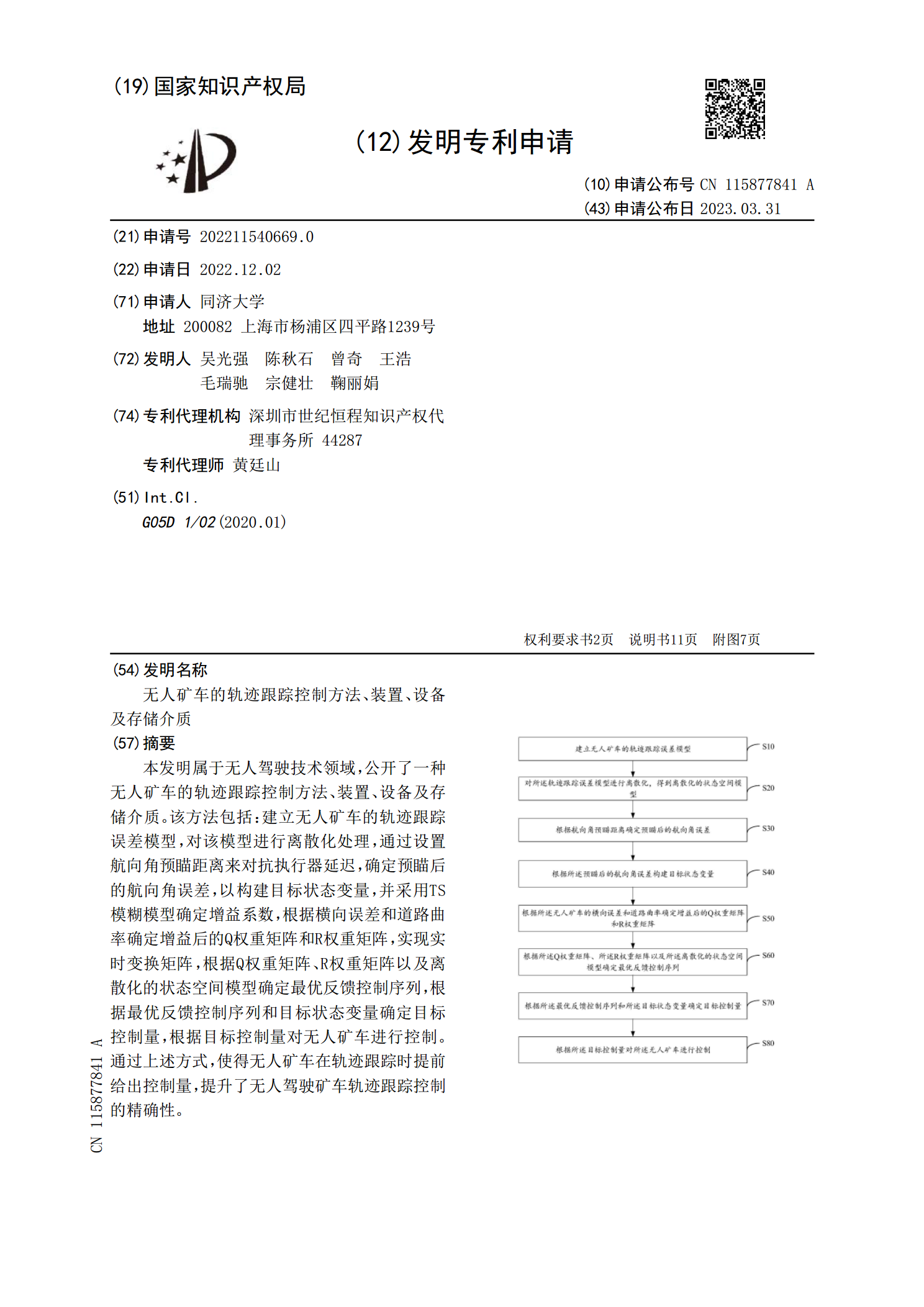
本发明属于无人驾驶技术领域,公开了一种无人矿车的轨迹跟踪控制方法、装置、设备及存储介质。该方法包括:建立无人矿车的轨迹跟踪误差模型,对该模型进行离散化处理,通过设置航向角预瞄距离来对抗执行器延迟,确定预瞄后的航向角误差,以构建目标状态变量,并采用TS模糊模型确定增益系数,根据横向误差和道路曲率确定增益后的Q权重矩阵和R权重矩阵,实现实时变换矩阵,根据Q权重矩阵、R权重矩阵以及离散化的状态空间模型确定最优反馈控制序列,根据最优反馈控制序列和目标状态变量确定目标控制量,根据目标控制量对无人矿车进行控制。通过上