
无人船路径规划方法及系统.pdf

文阁****23


1/10

2/10
3/10

4/10

5/10
6/10
7/10

8/10
9/10

10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
无人船路径规划方法及系统.pdf
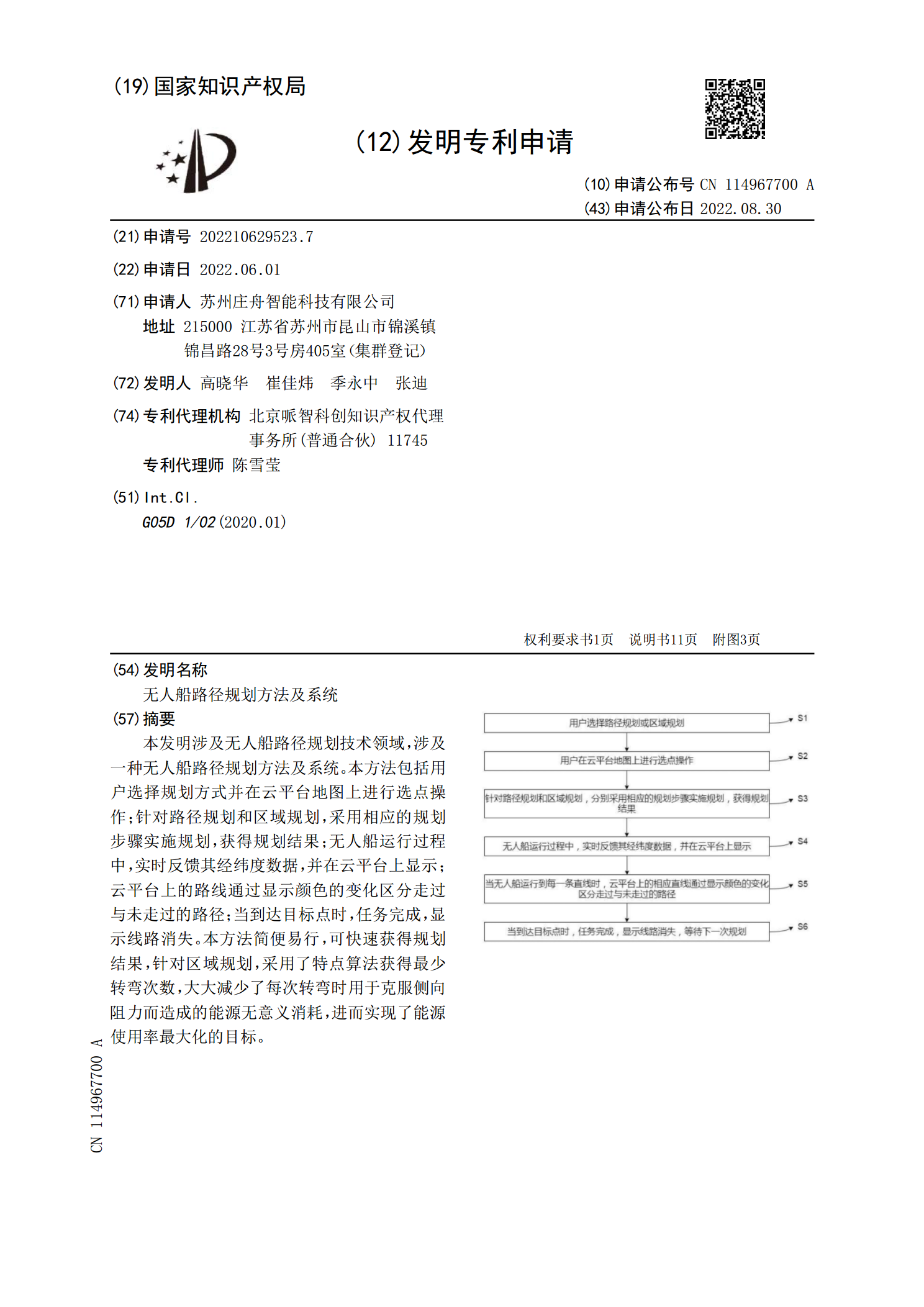
本发明涉及无人船路径规划技术领域,涉及一种无人船路径规划方法及系统。本方法包括用户选择规划方式并在云平台地图上进行选点操作;针对路径规划和区域规划,采用相应的规划步骤实施规划,获得规划结果;无人船运行过程中,实时反馈其经纬度数据,并在云平台上显示;云平台上的路线通过显示颜色的变化区分走过与未走过的路径;当到达目标点时,任务完成,显示线路消失。本方法简便易行,可快速获得规划结果,针对区域规划,采用了特点算法获得最少转弯次数,大大减少了每次转弯时用于克服侧向阻力而造成的能源无意义消耗,进而实现了能源使用率最大

无人船路径规划的研究.pptx
无人船路径规划的研究01添加章节标题无人船路径规划的背景和意义无人船的发展现状路径规划在无人船领域的应用价值研究目的和意义无人船路径规划的基本原理和方法路径规划的基本概念和分类无人船路径规划的算法原理无人船路径规划的关键技术无人船路径规划的算法实现和优化路径规划算法的实现过程算法优化策略和方法算法性能评估和测试无人船路径规划的实际应用和案例分析无人船路径规划在航道管理中的应用无人船路径规划在海洋资源开发中的应用无人船路径规划在环保监测中的应用案例分析和效果评估无人船路径规划的挑战和发展趋势无人船路径规划面

基于深度学习的无人船移动路径自动规划方法.docx
基于深度学习的无人船移动路径自动规划方法一、引言随着技术的不断发展,无人船的应用范围和使用环境也不断扩大。无人船被广泛应用于水域监测、水下勘测、环境调查等领域。在无人船的应用过程中,路径规划是关键问题之一。传统的路径规划方法受限于环境和控制器的精度等因素,无法达到理想的效果。本文基于深度学习,提出了一种基于神经网络的无人船移动路径自动规划方法,利用自主学习的方式,提高了路径规划的精度和速度。二、研究背景与现状无人船移动路径规划在很多领域都有广泛的应用,例如船舶自动驾驶、水质监测等。传统的路径规划方法通常采

无人船路径跟随控制方法综述.docx
无人船路径跟随控制方法综述无人船路径跟随控制方法综述摘要:无人船路径跟随控制是无人船自主航行的关键技术之一,其主要目标是使无人船能够按照预定的航线自主航行,并能在遇到障碍物或变化的环境中做出相应的调整,以保证航行的安全和稳定。本论文将综述当前无人船路径跟随控制方法的研究现状和发展趋势,包括基于经典控制方法、模型预测控制方法、模糊控制方法和深度学习方法等。一、引言无人船是指没有船员操控的船只,其自主航行技术已经取得了长足的发展。路径跟随控制是无人船自主航行的核心技术,主要包括路径规划和路径跟随两个方面。路径
无人船任意路径的追踪控制方法.pdf
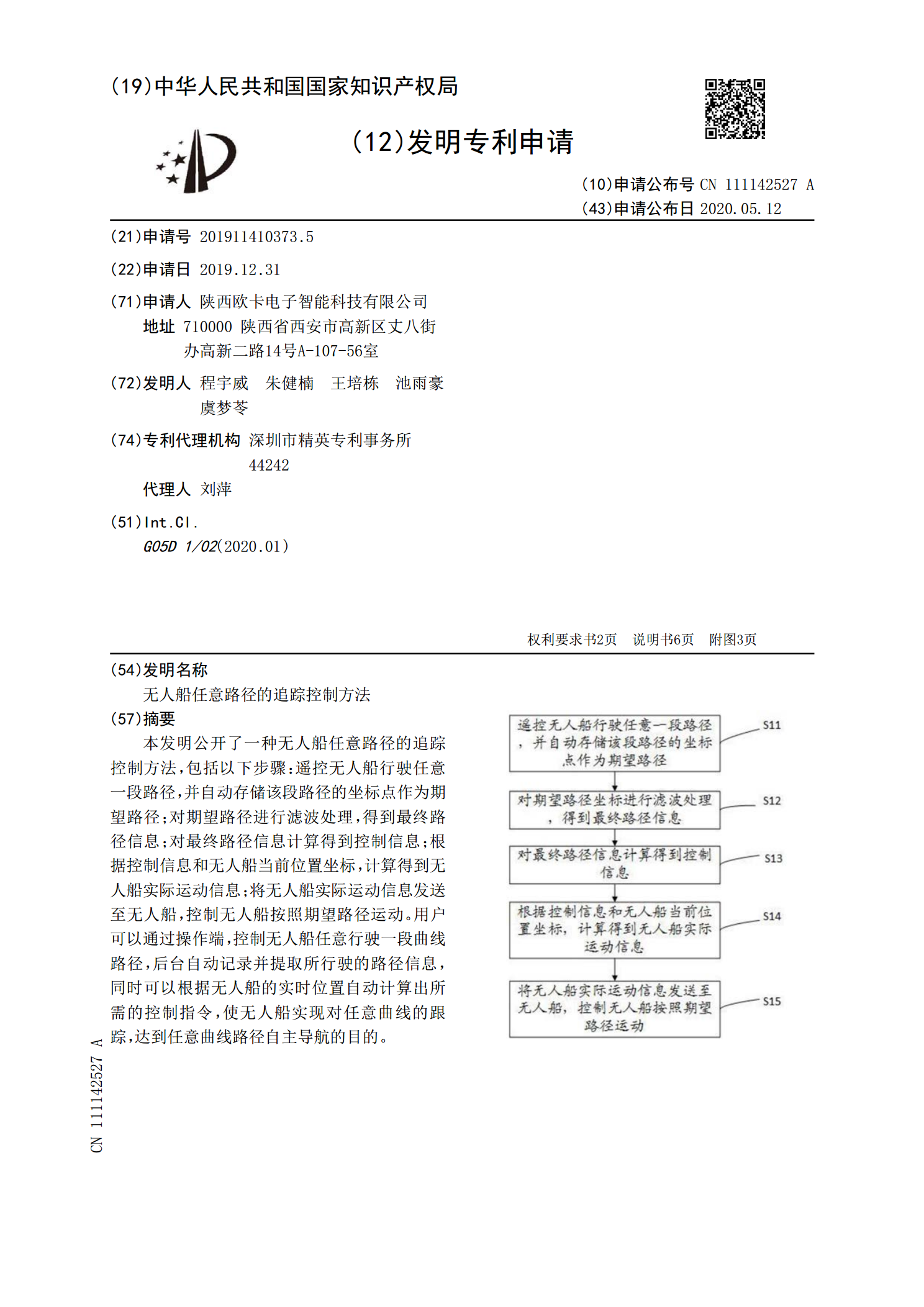
本发明公开了一种无人船任意路径的追踪控制方法,包括以下步骤:遥控无人船行驶任意一段路径,并自动存储该段路径的坐标点作为期望路径;对期望路径进行滤波处理,得到最终路径信息;对最终路径信息计算得到控制信息;根据控制信息和无人船当前位置坐标,计算得到无人船实际运动信息;将无人船实际运动信息发送至无人船,控制无人船按照期望路径运动。用户可以通过操作端,控制无人船任意行驶一段曲线路径,后台自动记录并提取所行驶的路径信息,同时可以根据无人船的实时位置自动计算出所需的控制指令,使无人船实现对任意曲线的跟踪,达到任意曲线