
自动行驶系统.pdf

An****99

1/10
2/10

3/10

4/10
5/10
6/10
7/10
8/10

9/10
10/10
亲,该文档总共116页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
自动行驶车以及自动行驶系统.pdf
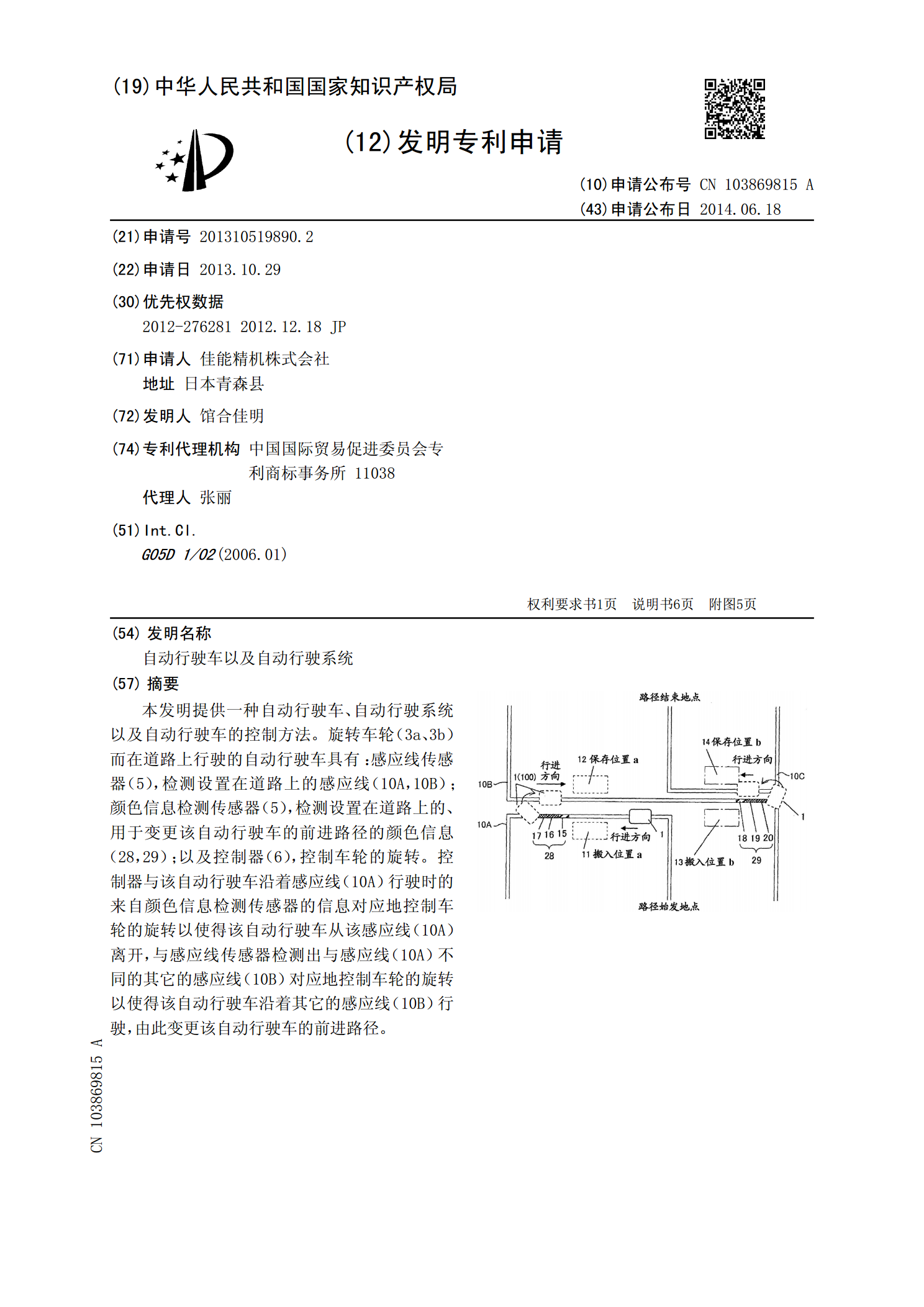
本发明提供一种自动行驶车、自动行驶系统以及自动行驶车的控制方法。旋转车轮(3a、3b)而在道路上行驶的自动行驶车具有:感应线传感器(5),检测设置在道路上的感应线(10A,10B);颜色信息检测传感器(5),检测设置在道路上的、用于变更该自动行驶车的前进路径的颜色信息(28,29);以及控制器(6),控制车轮的旋转。控制器与该自动行驶车沿着感应线(10A)行驶时的来自颜色信息检测传感器的信息对应地控制车轮的旋转以使得该自动行驶车从该感应线(10A)离开,与感应线传感器检测出与感应线(10A)不同的其它的感

自动行驶系统.pdf
本发明提供一种容易避免收割部的通过范围与已收割区域的重叠范围的宽度比较宽的情形的自动行驶系统。该自动行驶系统对联合收割机(1)的自动行驶进行管理,该联合收割机(1)具有梳理田地的直立谷秆的多个分禾器(5)和收割田地的直立谷秆的收割部,其中,所述自动行驶系统具备对用于沿着行方向的自动行驶的目标行驶路径(LA)进行计算的路径计算部,路径计算部构成为,以在联合收割机(1)沿着目标行驶路径(LA)行驶时满足规定条件的方式计算目标行驶路径(LA),规定条件如下:多个分禾器(5)中的从左端起的第规定个数的分禾器(53
自动行驶方法、作业车辆以及自动行驶系统.pdf
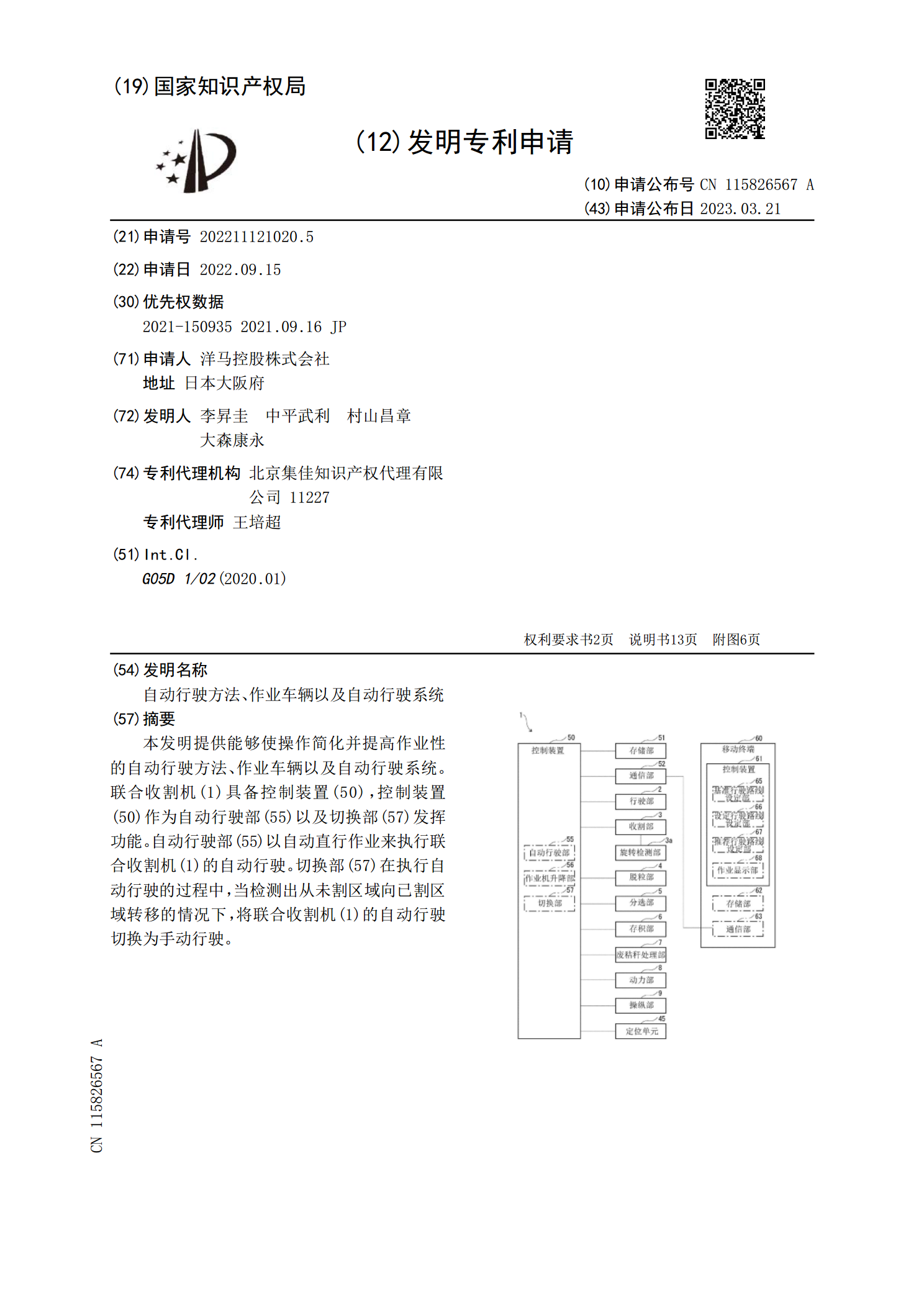
本发明提供能够使操作简化并提高作业性的自动行驶方法、作业车辆以及自动行驶系统。联合收割机(1)具备控制装置(50),控制装置(50)作为自动行驶部(55)以及切换部(57)发挥功能。自动行驶部(55)以自动直行作业来执行联合收割机(1)的自动行驶。切换部(57)在执行自动行驶的过程中,当检测出从未割区域向已割区域转移的情况下,将联合收割机(1)的自动行驶切换为手动行驶。

自动行驶方法、作业车辆以及自动行驶系统.pdf
本发明提供能够与作业机无关地设定适当的设定行驶路线而进行适当的自动直行作业的自动行驶方法、作业车辆以及自动行驶系统。联合收割机(1)具备控制装置(40)和便携终端(50)。根据便携终端的控制装置(51),基准行驶路线设定部(60)设定表示联合收割机的自动直行作业的行驶方向的基准行驶路线(75),作业机信息取得部(61)取得与作业机相关的作业机信息,基准点设定部基于作业机信息设定作业机基准点(78)的位置,设定行驶路线设定部基于基准行驶路线(75)和作业机基准点设定与基准行驶路线平行的设定行驶路线(76)。
自动行驶方法、作业车辆以及自动行驶系统.pdf
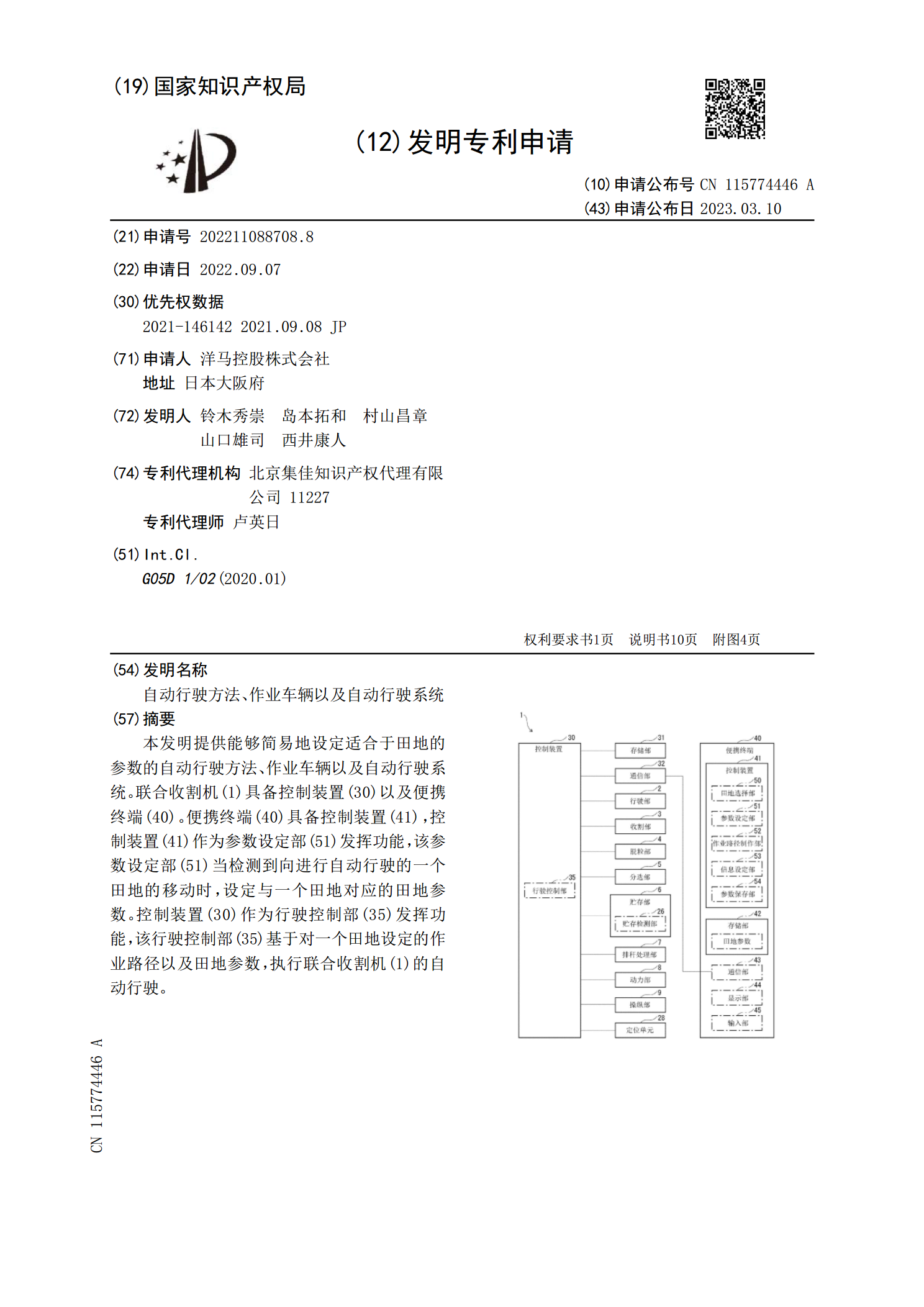
本发明提供能够简易地设定适合于田地的参数的自动行驶方法、作业车辆以及自动行驶系统。联合收割机(1)具备控制装置(30)以及便携终端(40)。便携终端(40)具备控制装置(41),控制装置(41)作为参数设定部(51)发挥功能,该参数设定部(51)当检测到向进行自动行驶的一个田地的移动时,设定与一个田地对应的田地参数。控制装置(30)作为行驶控制部(35)发挥功能,该行驶控制部(35)基于对一个田地设定的作业路径以及田地参数,执行联合收割机(1)的自动行驶。