
自动行驶方法、作业车辆以及自动行驶系统.pdf

是湛****21


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

自动行驶方法、作业车辆以及自动行驶系统.pdf
本发明提供能够与作业机无关地设定适当的设定行驶路线而进行适当的自动直行作业的自动行驶方法、作业车辆以及自动行驶系统。联合收割机(1)具备控制装置(40)和便携终端(50)。根据便携终端的控制装置(51),基准行驶路线设定部(60)设定表示联合收割机的自动直行作业的行驶方向的基准行驶路线(75),作业机信息取得部(61)取得与作业机相关的作业机信息,基准点设定部基于作业机信息设定作业机基准点(78)的位置,设定行驶路线设定部基于基准行驶路线(75)和作业机基准点设定与基准行驶路线平行的设定行驶路线(76)。
自动行驶方法、作业车辆以及自动行驶系统.pdf
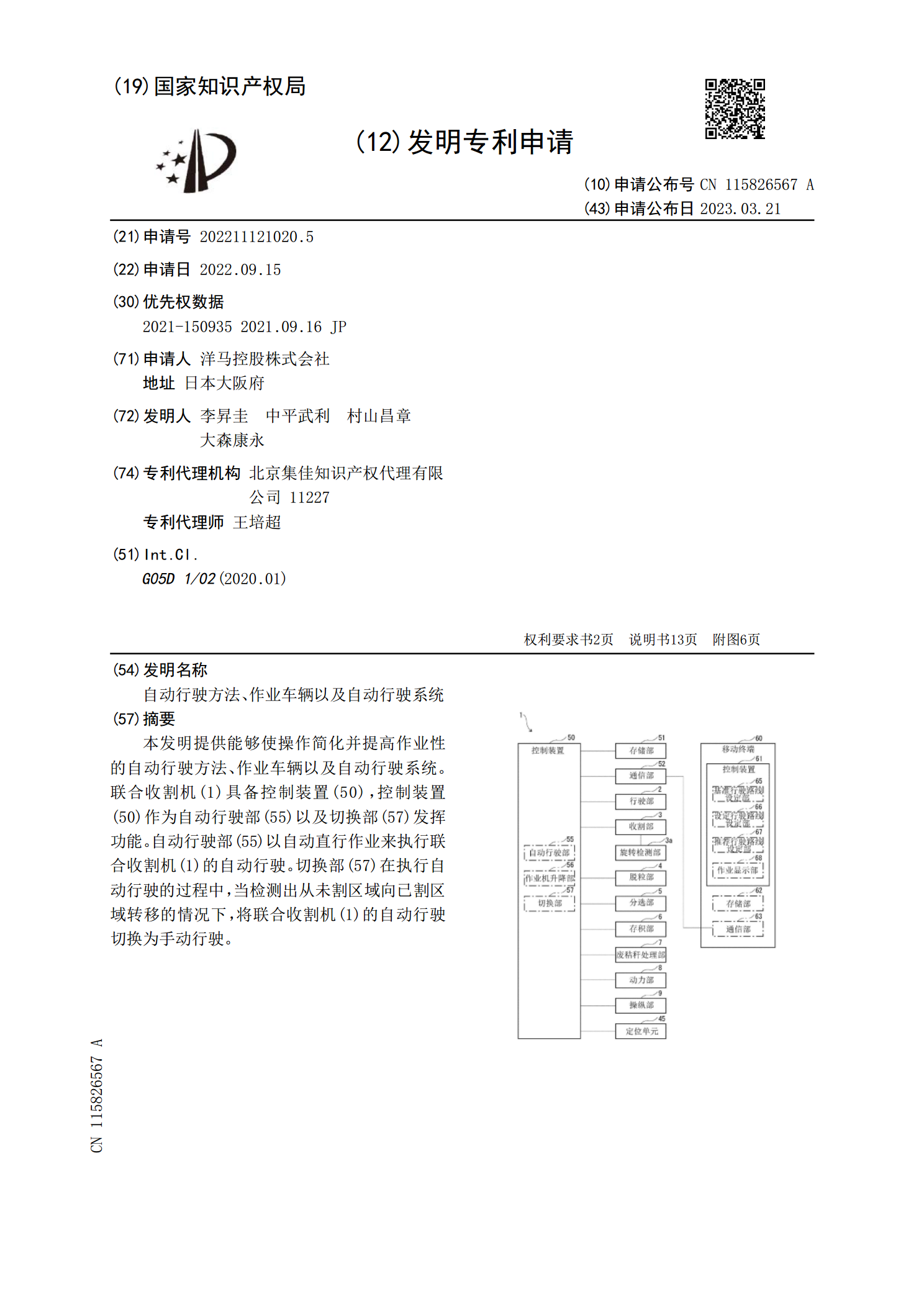
本发明提供能够使操作简化并提高作业性的自动行驶方法、作业车辆以及自动行驶系统。联合收割机(1)具备控制装置(50),控制装置(50)作为自动行驶部(55)以及切换部(57)发挥功能。自动行驶部(55)以自动直行作业来执行联合收割机(1)的自动行驶。切换部(57)在执行自动行驶的过程中,当检测出从未割区域向已割区域转移的情况下,将联合收割机(1)的自动行驶切换为手动行驶。
自动行驶方法、作业车辆以及自动行驶系统.pdf
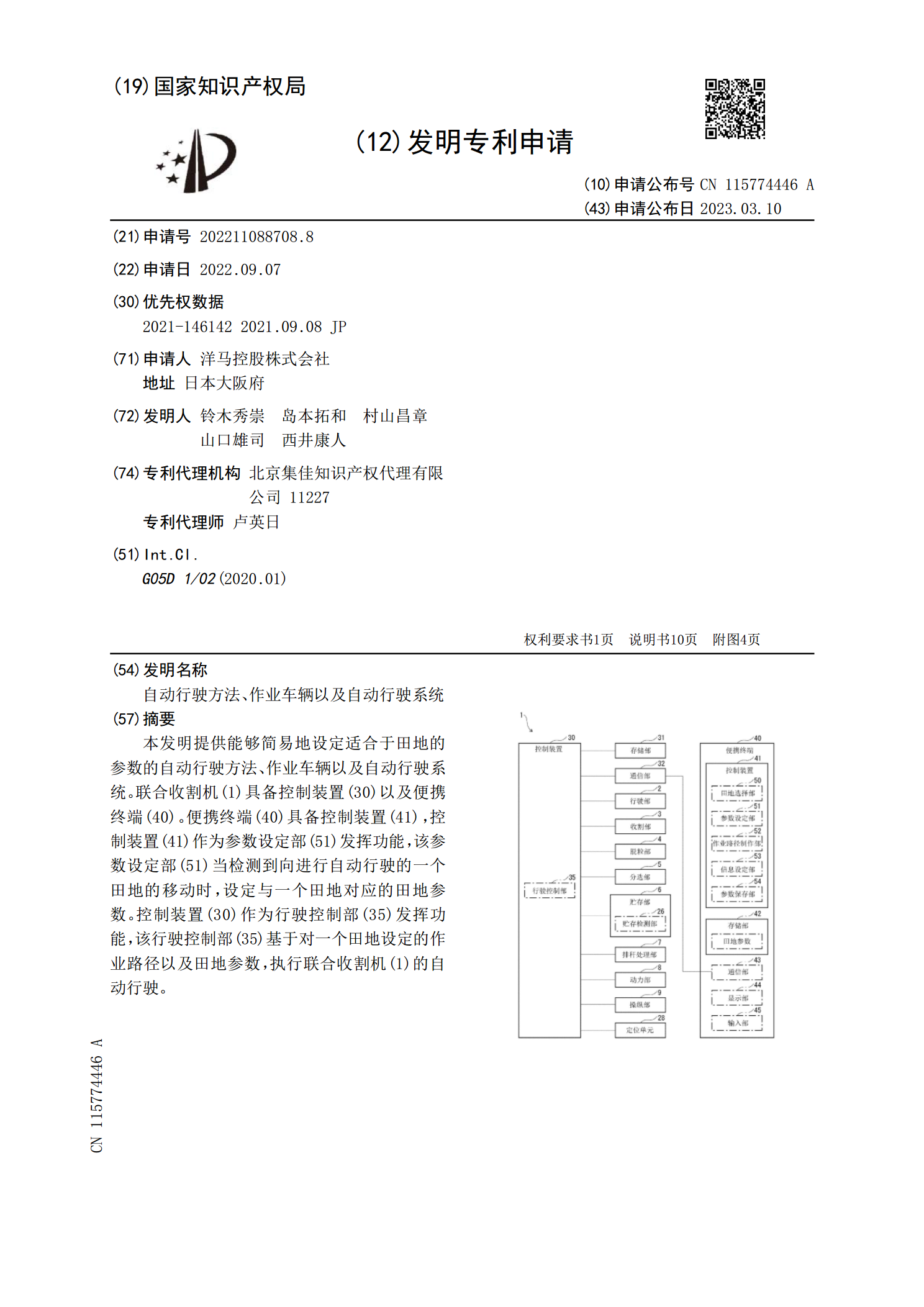
本发明提供能够简易地设定适合于田地的参数的自动行驶方法、作业车辆以及自动行驶系统。联合收割机(1)具备控制装置(30)以及便携终端(40)。便携终端(40)具备控制装置(41),控制装置(41)作为参数设定部(51)发挥功能,该参数设定部(51)当检测到向进行自动行驶的一个田地的移动时,设定与一个田地对应的田地参数。控制装置(30)作为行驶控制部(35)发挥功能,该行驶控制部(35)基于对一个田地设定的作业路径以及田地参数,执行联合收割机(1)的自动行驶。

自动行驶系统以及行驶指示方法.pdf
能够针对每个行驶路线指定适当的行驶参数。自动行驶系统(10a)包括管理服务器(16)及AGV(20),管理服务器控制AGV。管理服务器在有输送请求时,确定能够使用的AGV,并且确定从等待场所到装载场所的行驶路线,确定与行驶路线相应的行驶参数表,向对象的AGV发送包含行驶路线和行驶参数表的行驶指示。AGV使用与货物的载荷及行驶的速度对应的行驶参数,按照行驶路线行驶。同样地,从装载场所行驶到输送目的地,进而从输送目的地行驶到等待场所。但是,针对每个行驶路线,将行驶路线和与其对应的行驶参数表发送到对象的AGV。
自动行驶方法、农业用材料补给方法、自动行驶系统以及自动行驶程序.pdf
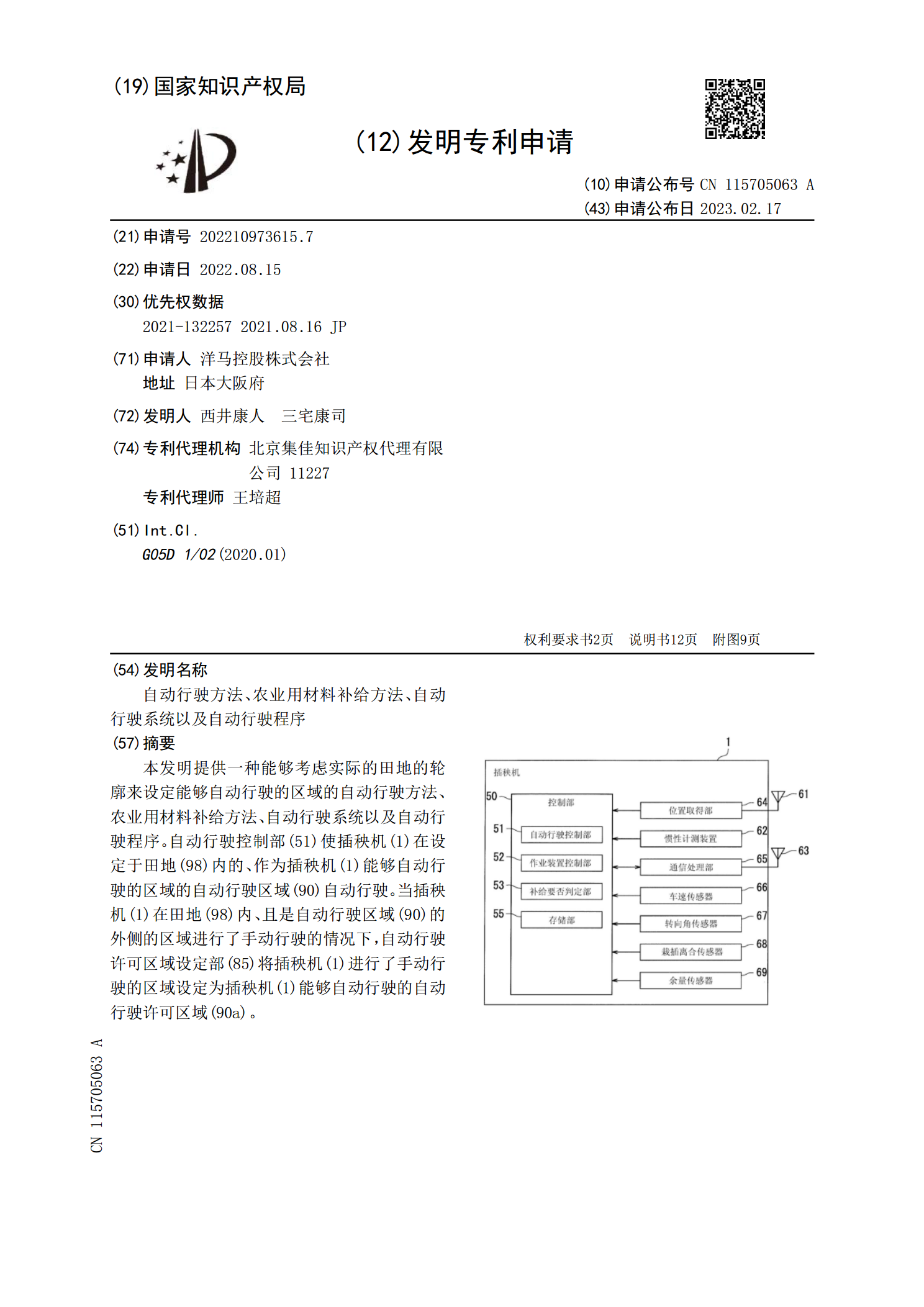
本发明提供一种能够考虑实际的田地的轮廓来设定能够自动行驶的区域的自动行驶方法、农业用材料补给方法、自动行驶系统以及自动行驶程序。自动行驶控制部(51)使插秧机(1)在设定于田地(98)内的、作为插秧机(1)能够自动行驶的区域的自动行驶区域(90)自动行驶。当插秧机(1)在田地(98)内、且是自动行驶区域(90)的外侧的区域进行了手动行驶的情况下,自动行驶许可区域设定部(85)将插秧机(1)进行了手动行驶的区域设定为插秧机(1)能够自动行驶的自动行驶许可区域(90a)。