
支腿式工程机械、支腿控制系统及方法.pdf

一吃****海逸


1/10

2/10

3/10
4/10

5/10
6/10
7/10
8/10

9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
支腿式工程机械、支腿控制系统及方法.pdf
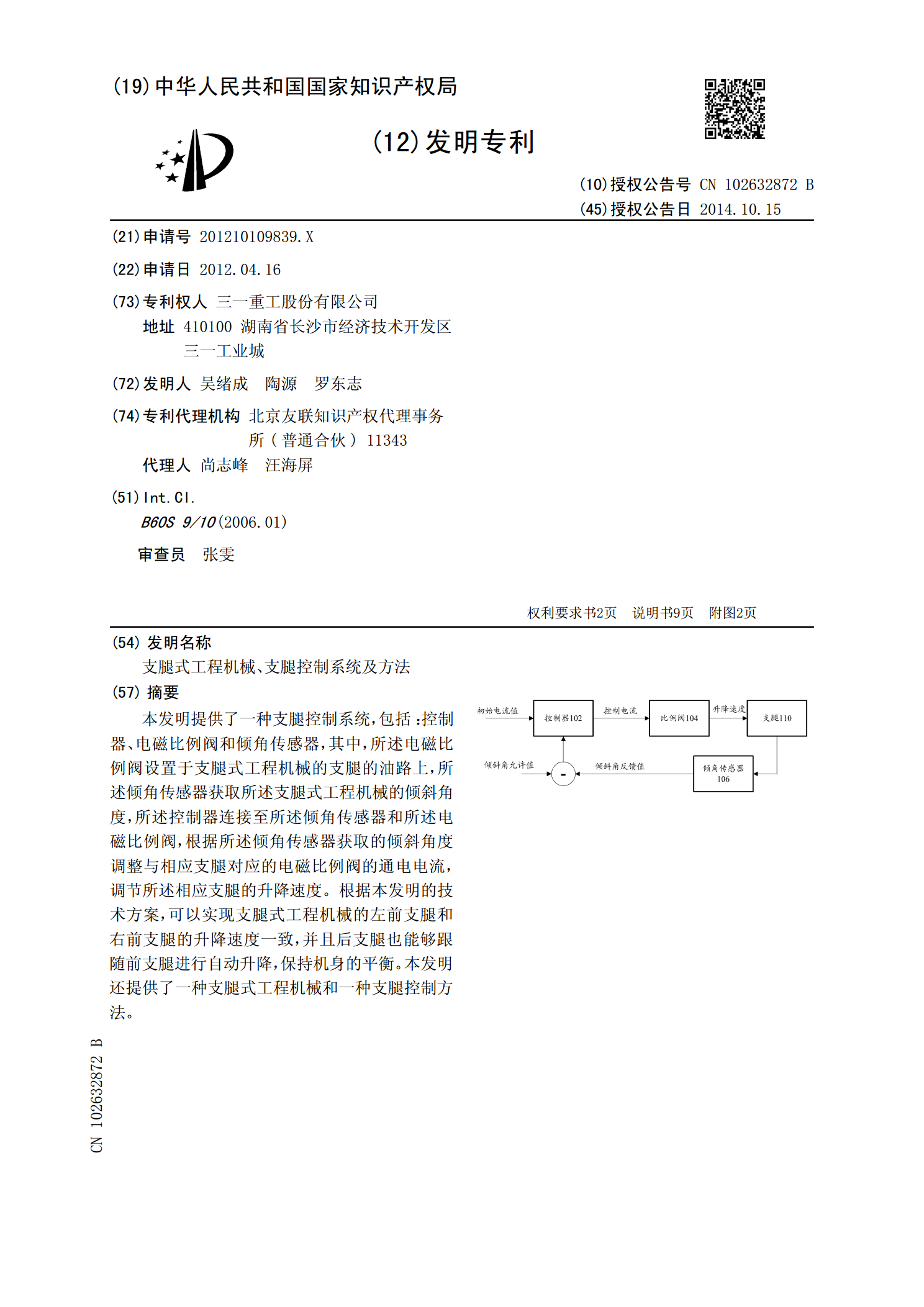
本发明提供了一种支腿控制系统,包括:控制器、电磁比例阀和倾角传感器,其中,所述电磁比例阀设置于支腿式工程机械的支腿的油路上,所述倾角传感器获取所述支腿式工程机械的倾斜角度,所述控制器连接至所述倾角传感器和所述电磁比例阀,根据所述倾角传感器获取的倾斜角度调整与相应支腿对应的电磁比例阀的通电电流,调节所述相应支腿的升降速度。根据本发明的技术方案,可以实现支腿式工程机械的左前支腿和右前支腿的升降速度一致,并且后支腿也能够跟随前支腿进行自动升降,保持机身的平衡。本发明还提供了一种支腿式工程机械和一种支腿控制方法。
支腿反力传感器和支腿式工程机械.pdf
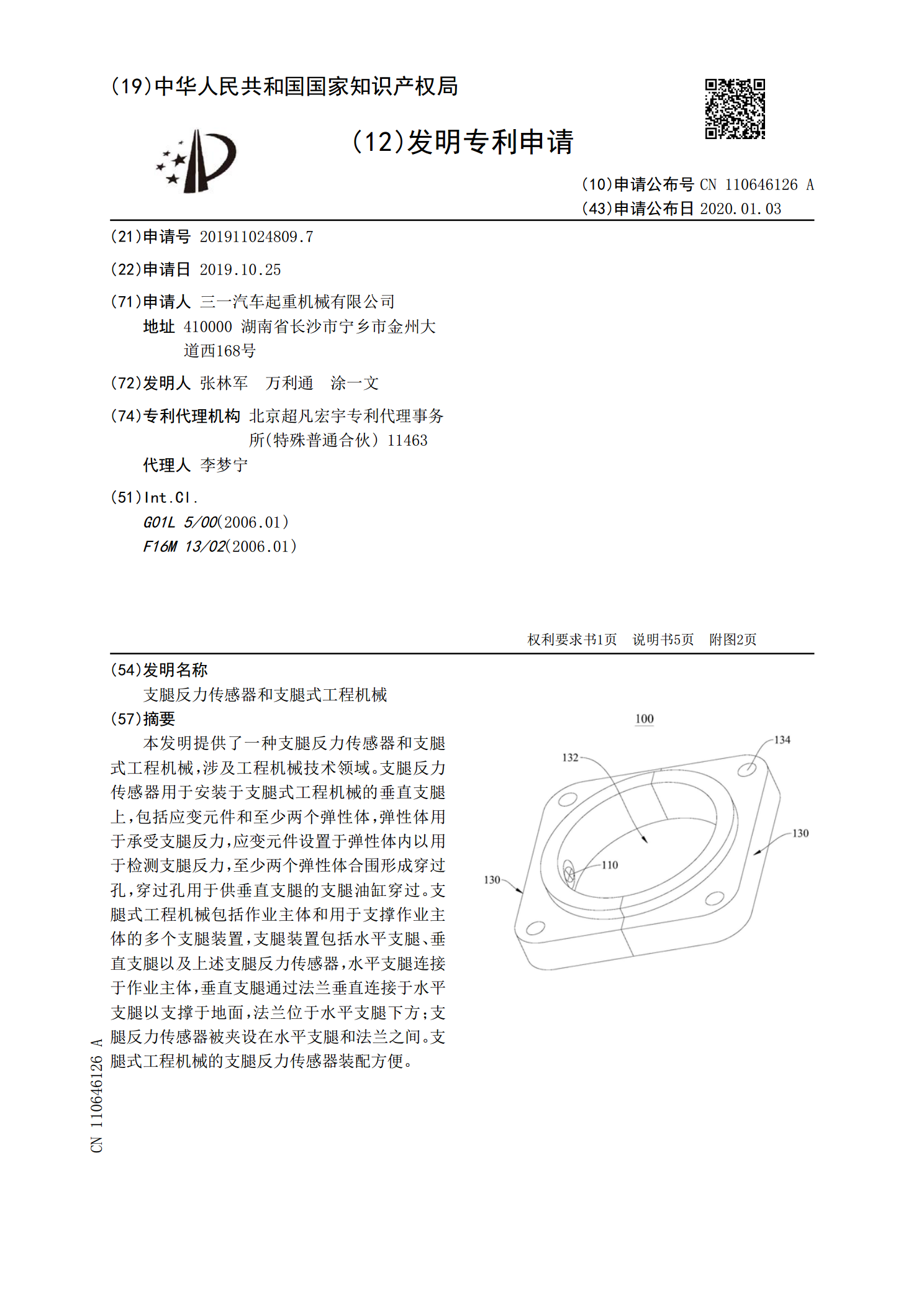
本发明提供了一种支腿反力传感器和支腿式工程机械,涉及工程机械技术领域。支腿反力传感器用于安装于支腿式工程机械的垂直支腿上,包括应变元件和至少两个弹性体,弹性体用于承受支腿反力,应变元件设置于弹性体内以用于检测支腿反力,至少两个弹性体合围形成穿过孔,穿过孔用于供垂直支腿的支腿油缸穿过。支腿式工程机械包括作业主体和用于支撑作业主体的多个支腿装置,支腿装置包括水平支腿、垂直支腿以及上述支腿反力传感器,水平支腿连接于作业主体,垂直支腿通过法兰垂直连接于水平支腿以支撑于地面,法兰位于水平支腿下方;支腿反力传感器被夹
支腿升降控制系统和方法、及工程机械.pdf
本发明公开了一种支腿升降控制系统和方法、及工程机械,涉及控制技术领域,其中,系统包括:长度传感器,用于检测工程机械的每个支腿的伸长量;控制器,用于根据每个支腿的伸长量控制每个支腿的升降速度。本发明实施例根据支腿的伸长量来控制支腿的升降速度,可以使得工程机械整机平稳升降,减小支腿之间、支腿与工程机械本身之间的冲撞。
用于支腿受力传感器标定的方法、装置及支腿式工程机械.pdf
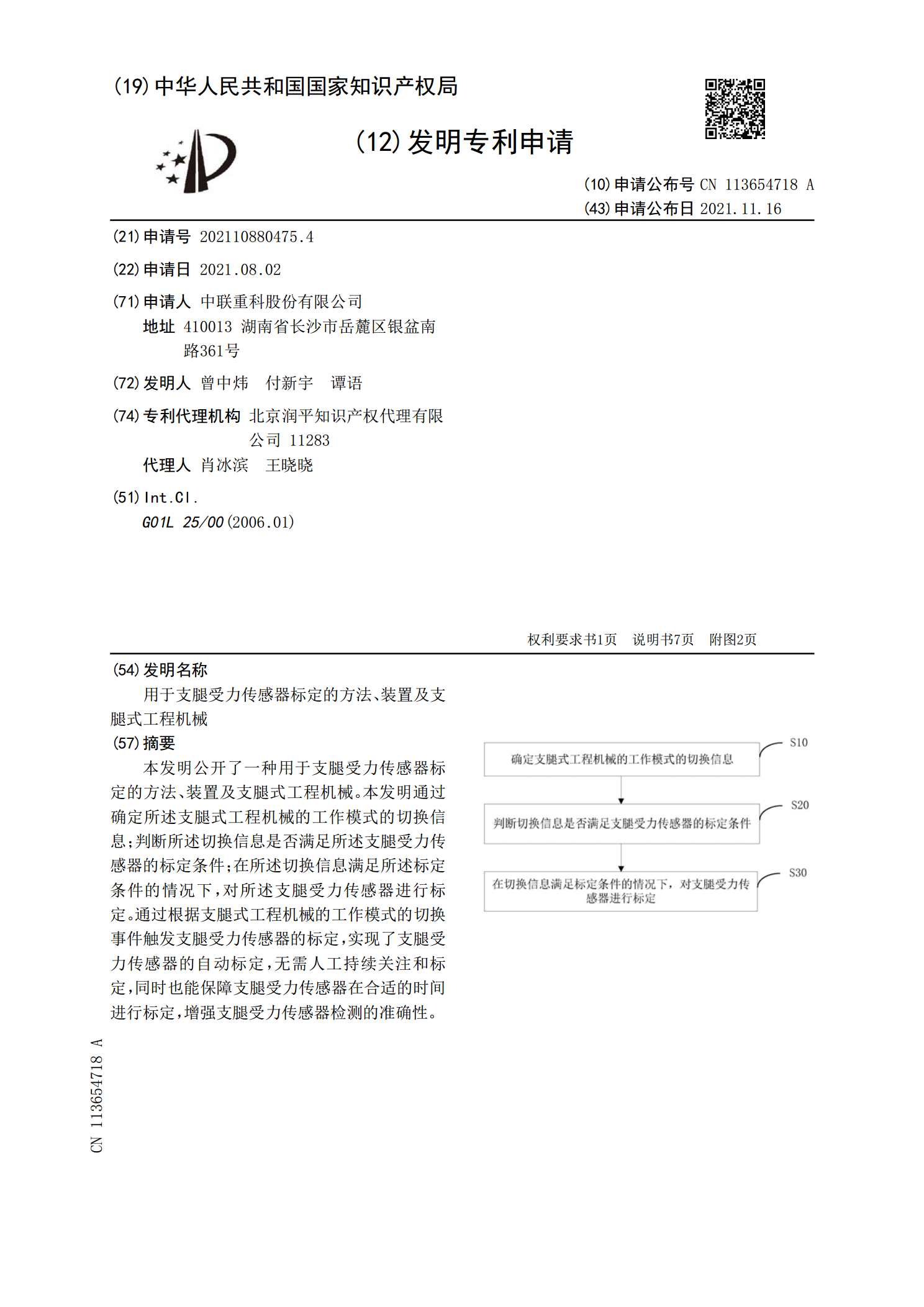
本发明公开了一种用于支腿受力传感器标定的方法、装置及支腿式工程机械。本发明通过确定所述支腿式工程机械的工作模式的切换信息;判断所述切换信息是否满足所述支腿受力传感器的标定条件;在所述切换信息满足所述标定条件的情况下,对所述支腿受力传感器进行标定。通过根据支腿式工程机械的工作模式的切换事件触发支腿受力传感器的标定,实现了支腿受力传感器的自动标定,无需人工持续关注和标定,同时也能保障支腿受力传感器在合适的时间进行标定,增强支腿受力传感器检测的准确性。
支腿结构及具有该支腿结构的工程机械.pdf
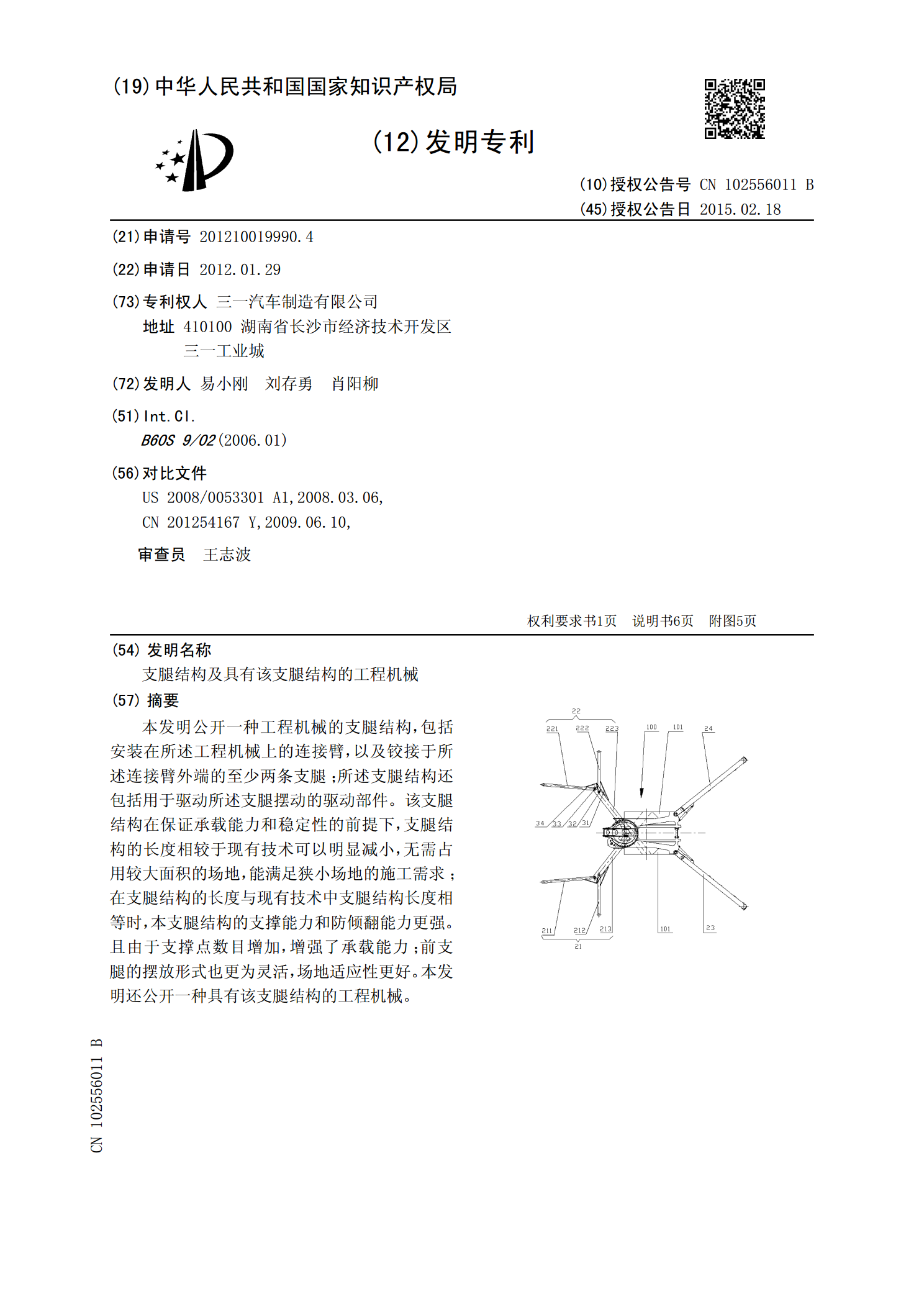
本发明公开一种工程机械的支腿结构,包括安装在所述工程机械上的连接臂,以及铰接于所述连接臂外端的至少两条支腿;所述支腿结构还包括用于驱动所述支腿摆动的驱动部件。该支腿结构在保证承载能力和稳定性的前提下,支腿结构的长度相较于现有技术可以明显减小,无需占用较大面积的场地,能满足狭小场地的施工需求;在支腿结构的长度与现有技术中支腿结构长度相等时,本支腿结构的支撑能力和防倾翻能力更强。且由于支撑点数目增加,增强了承载能力;前支腿的摆放形式也更为灵活,场地适应性更好。本发明还公开一种具有该支腿结构的工程机械。