
植保无人车支腿和植保无人车.pdf

是你****噩呀

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
植保无人车支腿和植保无人车.pdf
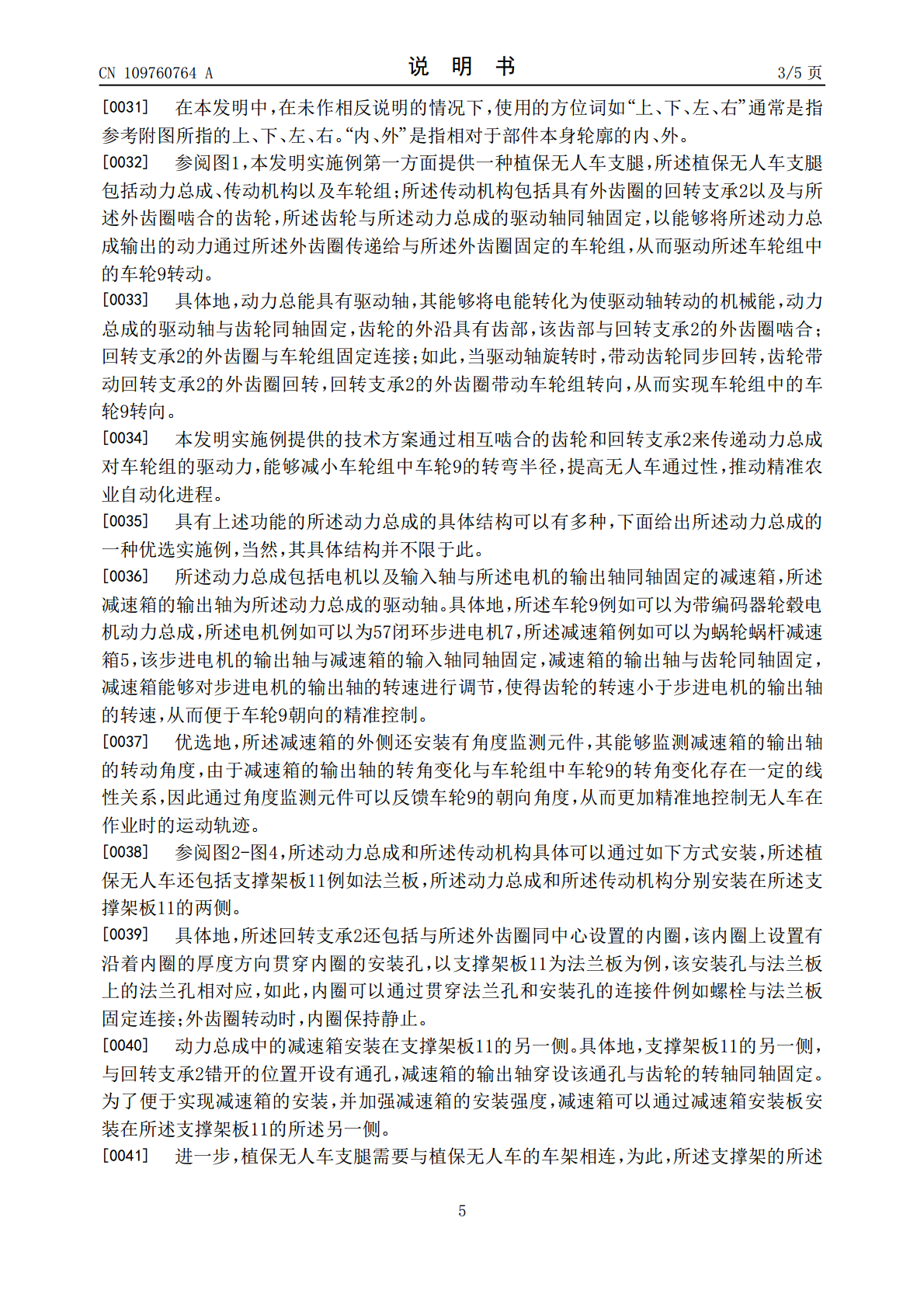
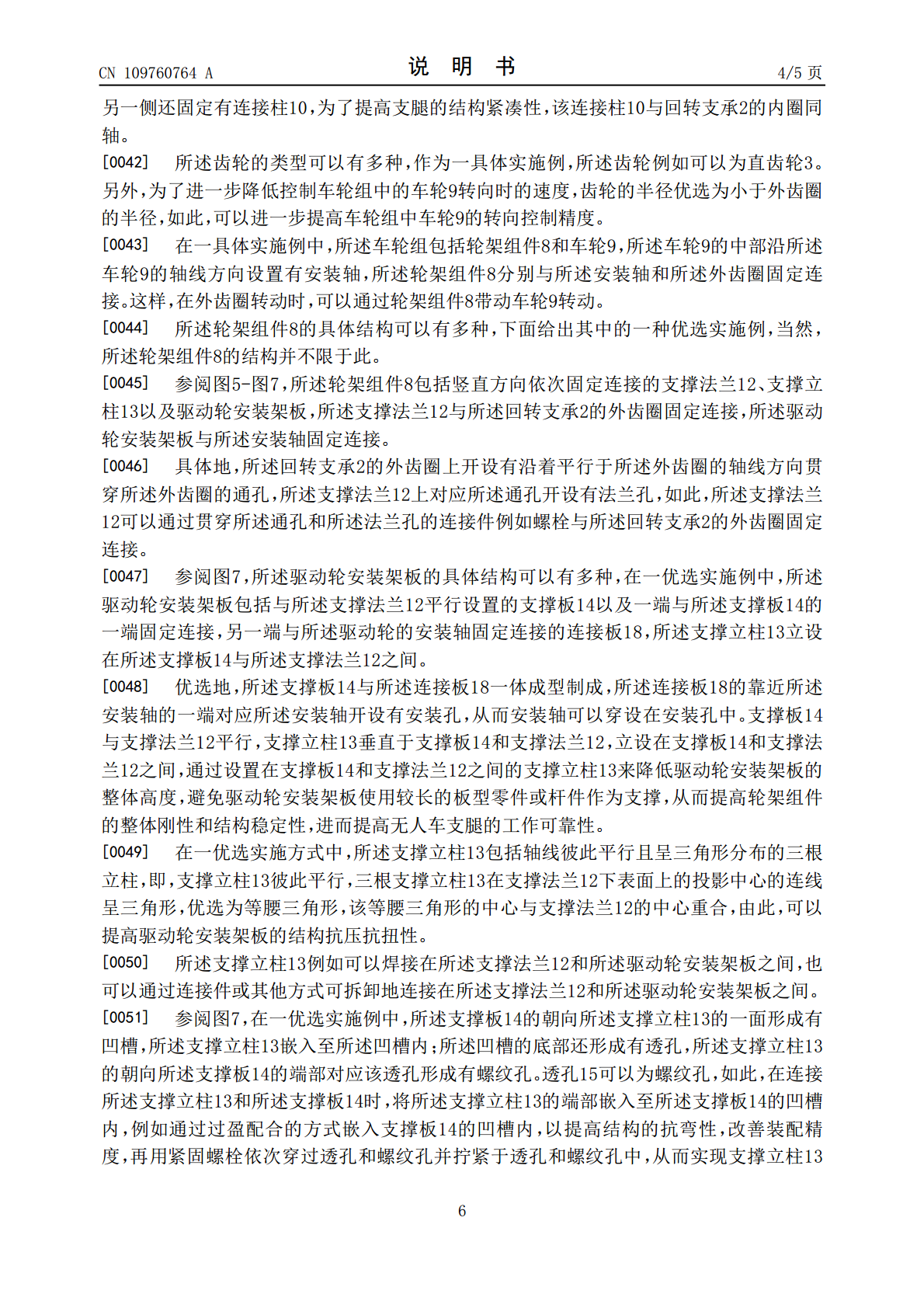
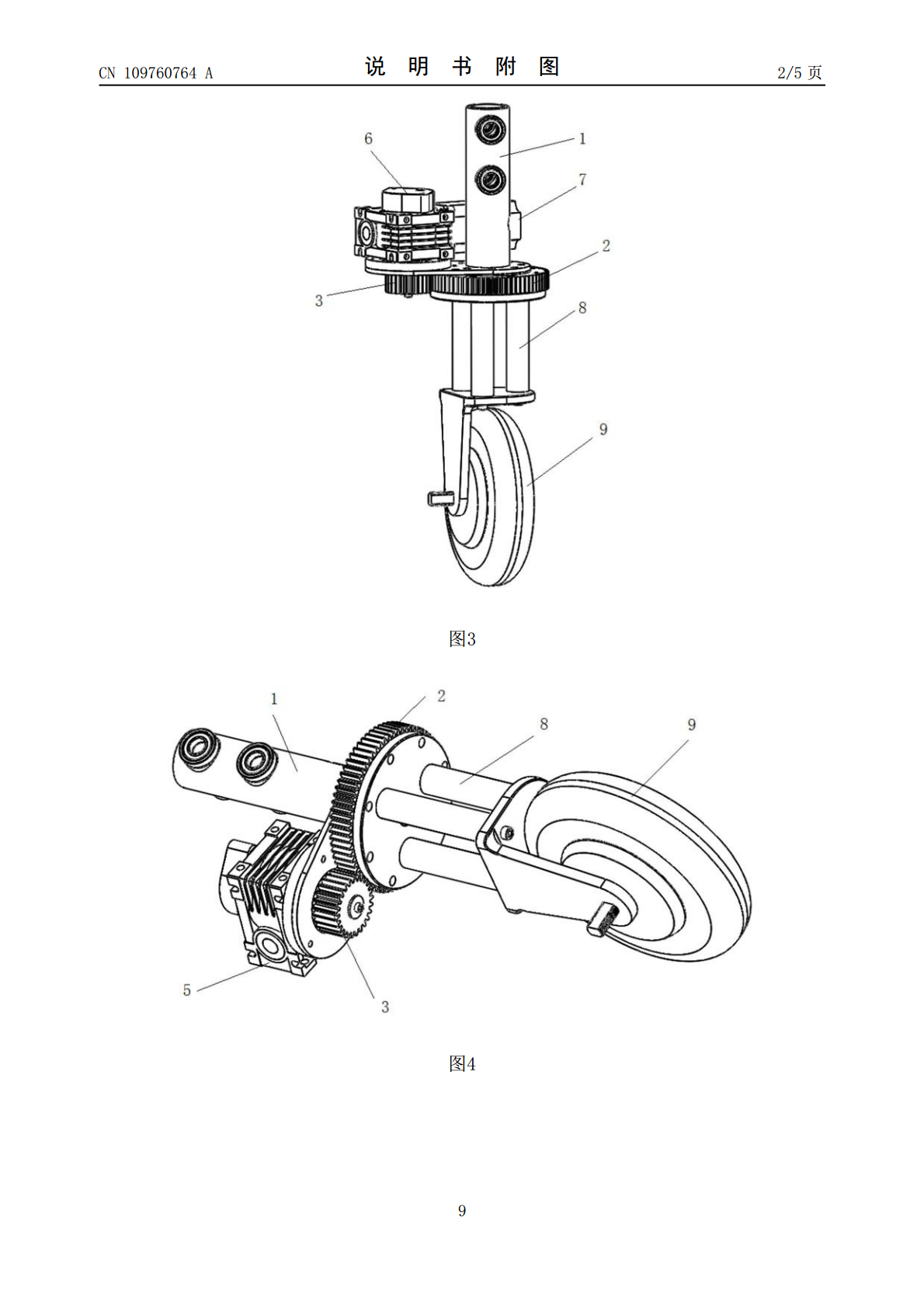
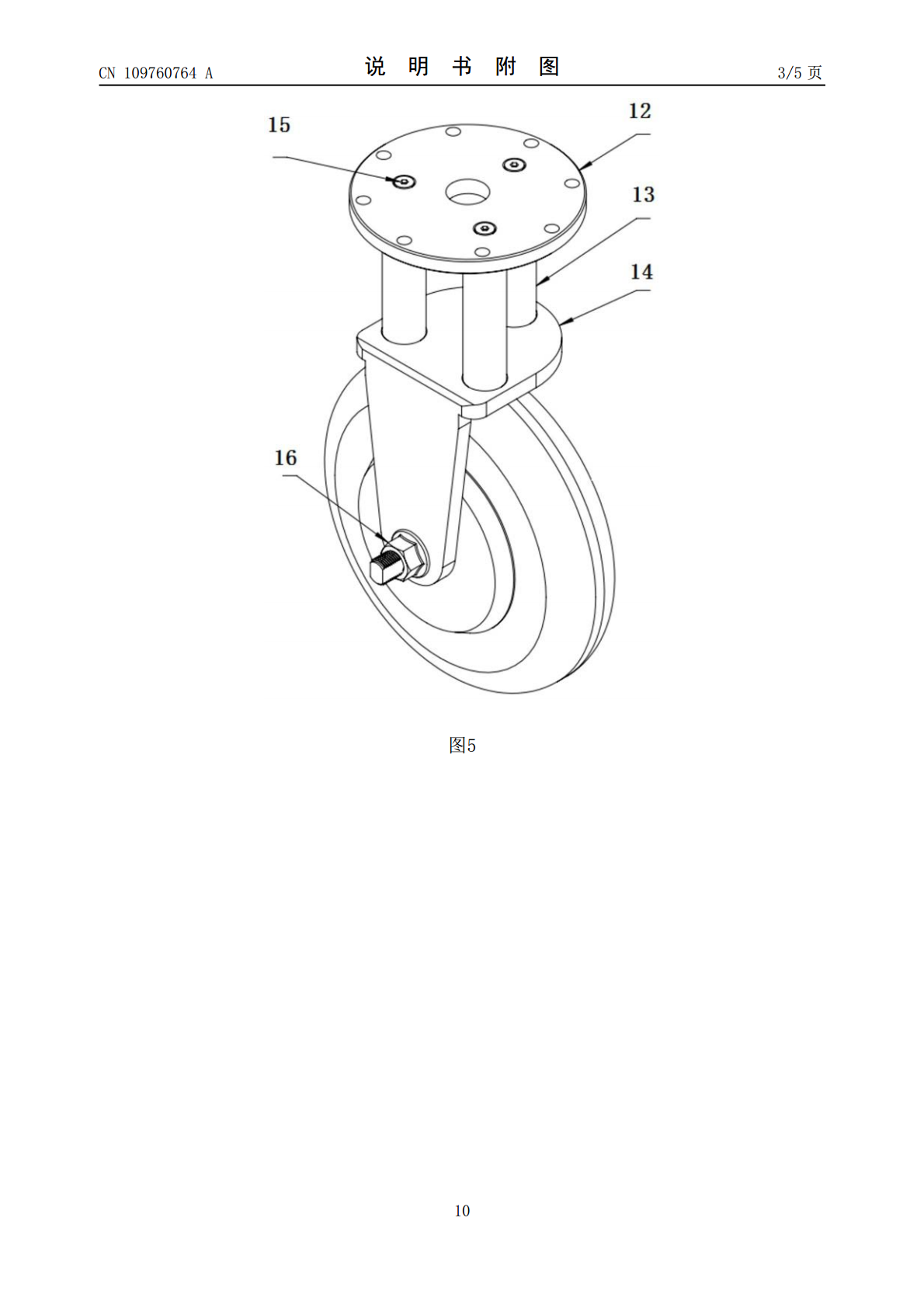
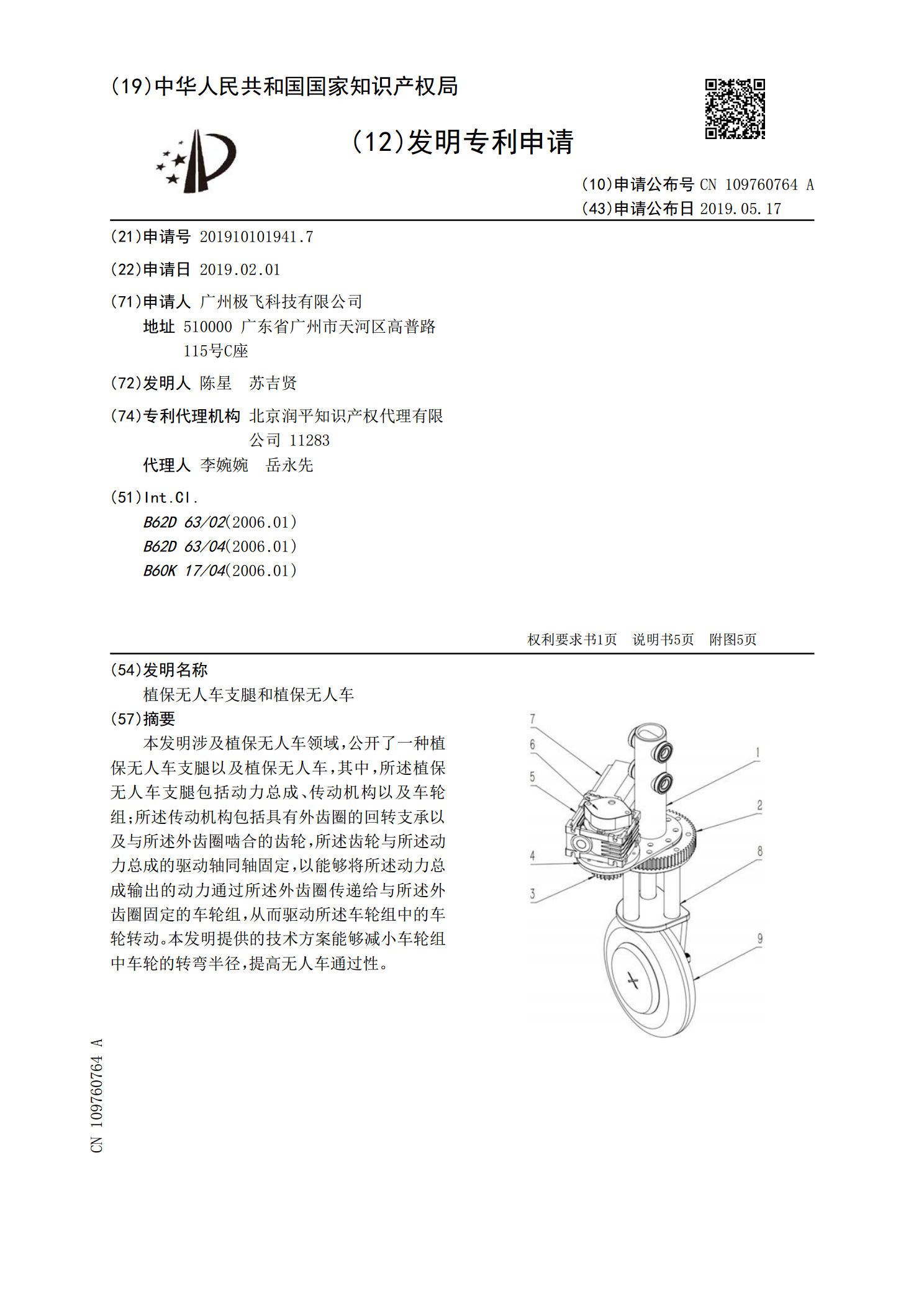
本发明涉及植保无人车领域,公开了一种植保无人车支腿以及植保无人车,其中,所述植保无人车支腿包括动力总成、传动机构以及车轮组;所述传动机构包括具有外齿圈的回转支承以及与所述外齿圈啮合的齿轮,所述齿轮与所述动力总成的驱动轴同轴固定,以能够将所述动力总成输出的动力通过所述外齿圈传递给与所述外齿圈固定的车轮组,从而驱动所述车轮组中的车轮转动。本发明提供的技术方案能够减小车轮组中车轮的转弯半径,提高无人车通过性。
植保无人车.pdf
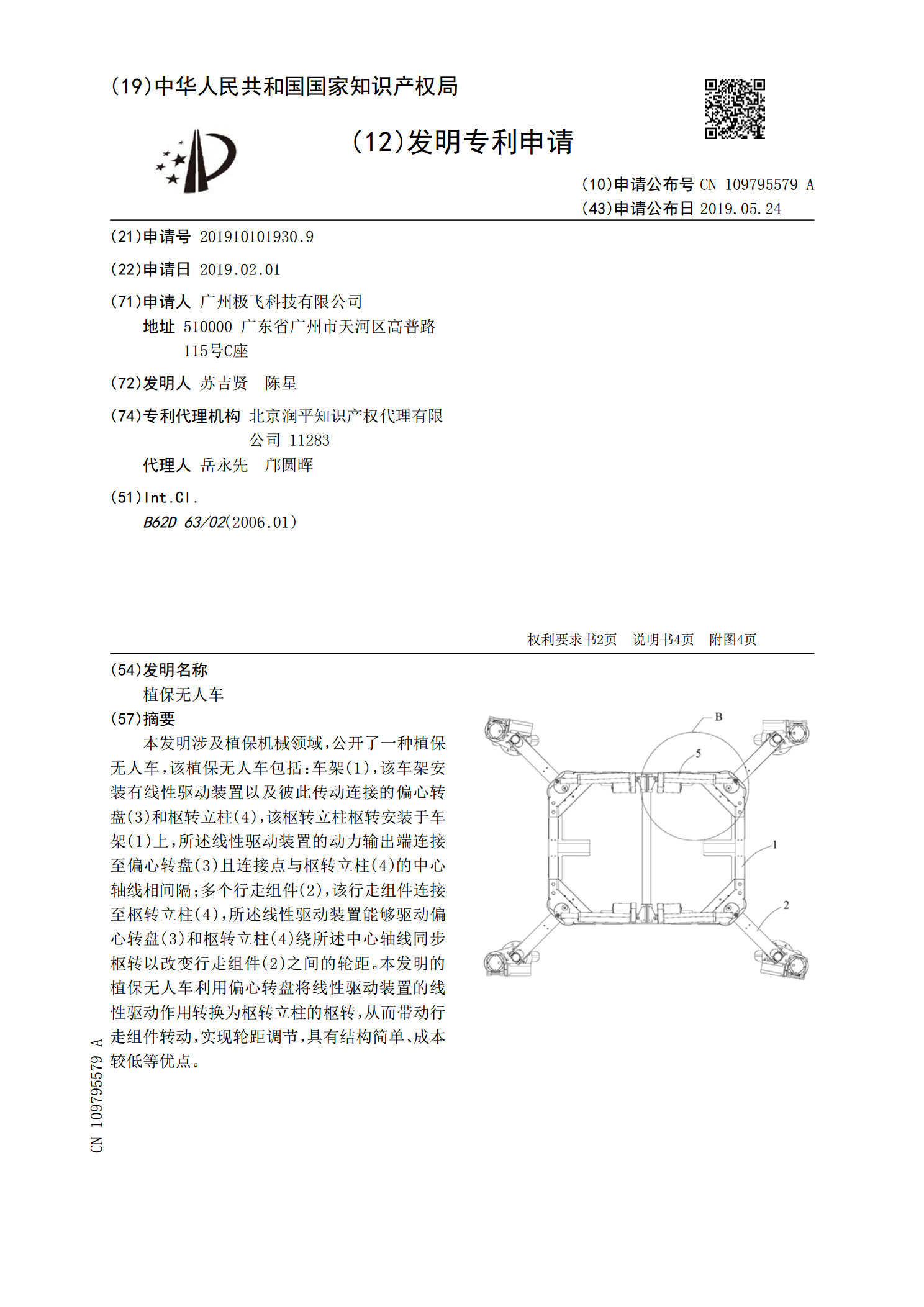
本发明涉及植保机械领域,公开了一种植保无人车,该植保无人车包括:车架(1),该车架安装有线性驱动装置以及彼此传动连接的偏心转盘(3)和枢转立柱(4),该枢转立柱枢转安装于车架(1)上,所述线性驱动装置的动力输出端连接至偏心转盘(3)且连接点与枢转立柱(4)的中心轴线相间隔;多个行走组件(2),该行走组件连接至枢转立柱(4),所述线性驱动装置能够驱动偏心转盘(3)和枢转立柱(4)绕所述中心轴线同步枢转以改变行走组件(2)之间的轮距。本发明的植保无人车利用偏心转盘将线性驱动装置的线性驱动作用转换为枢转立柱的枢
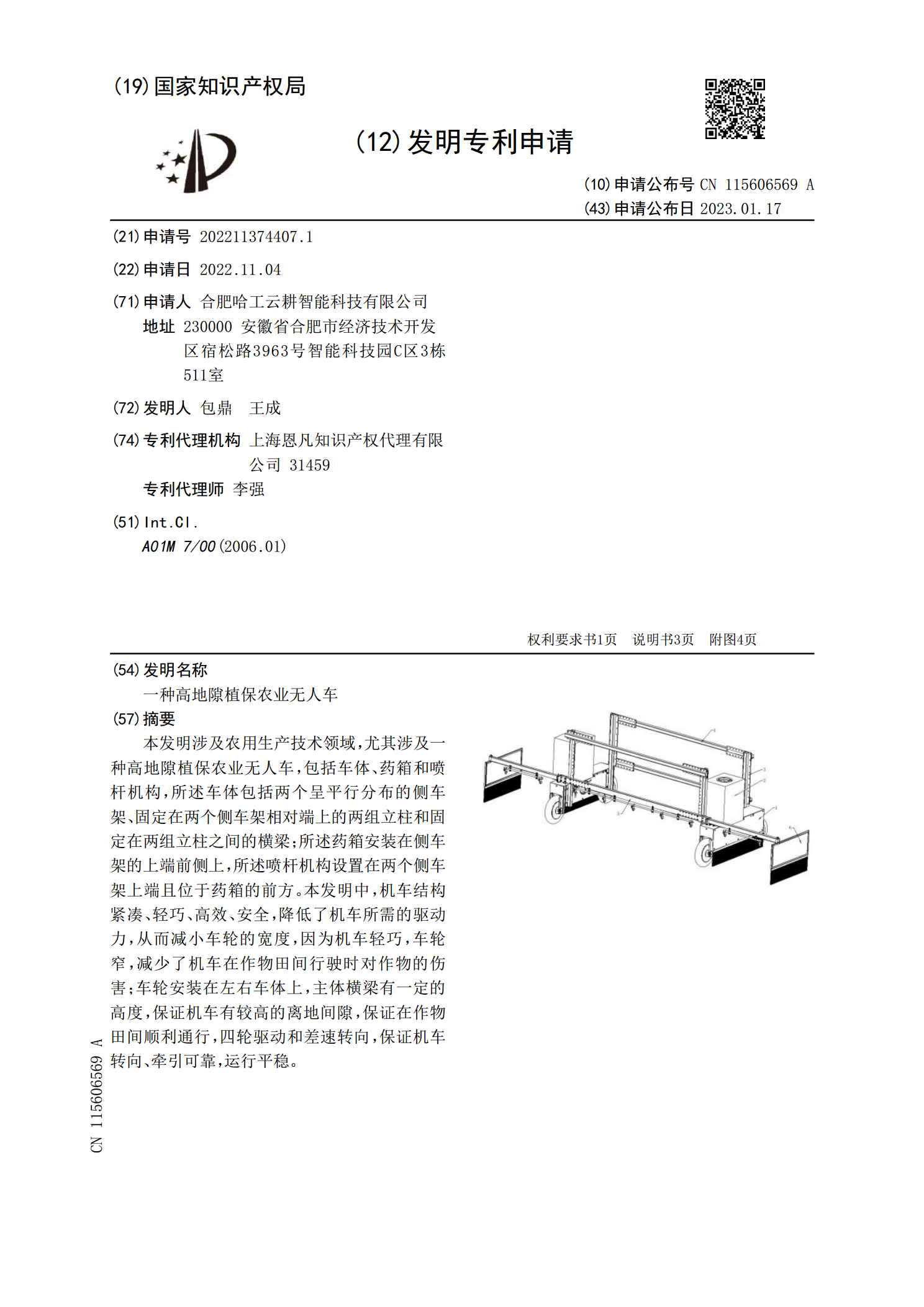
一种高地隙植保农业无人车.pdf
本发明涉及农用生产技术领域,尤其涉及一种高地隙植保农业无人车,包括车体、药箱和喷杆机构,所述车体包括两个呈平行分布的侧车架、固定在两个侧车架相对端上的两组立柱和固定在两组立柱之间的横梁;所述药箱安装在侧车架的上端前侧上,所述喷杆机构设置在两个侧车架上端且位于药箱的前方。本发明中,机车结构紧凑、轻巧、高效、安全,降低了机车所需的驱动力,从而减小车轮的宽度,因为机车轻巧,车轮窄,减少了机车在作物田间行驶时对作物的伤害;车轮安装在左右车体上,主体横梁有一定的高度,保证机车有较高的离地间隙,保证在作物田间顺利通行
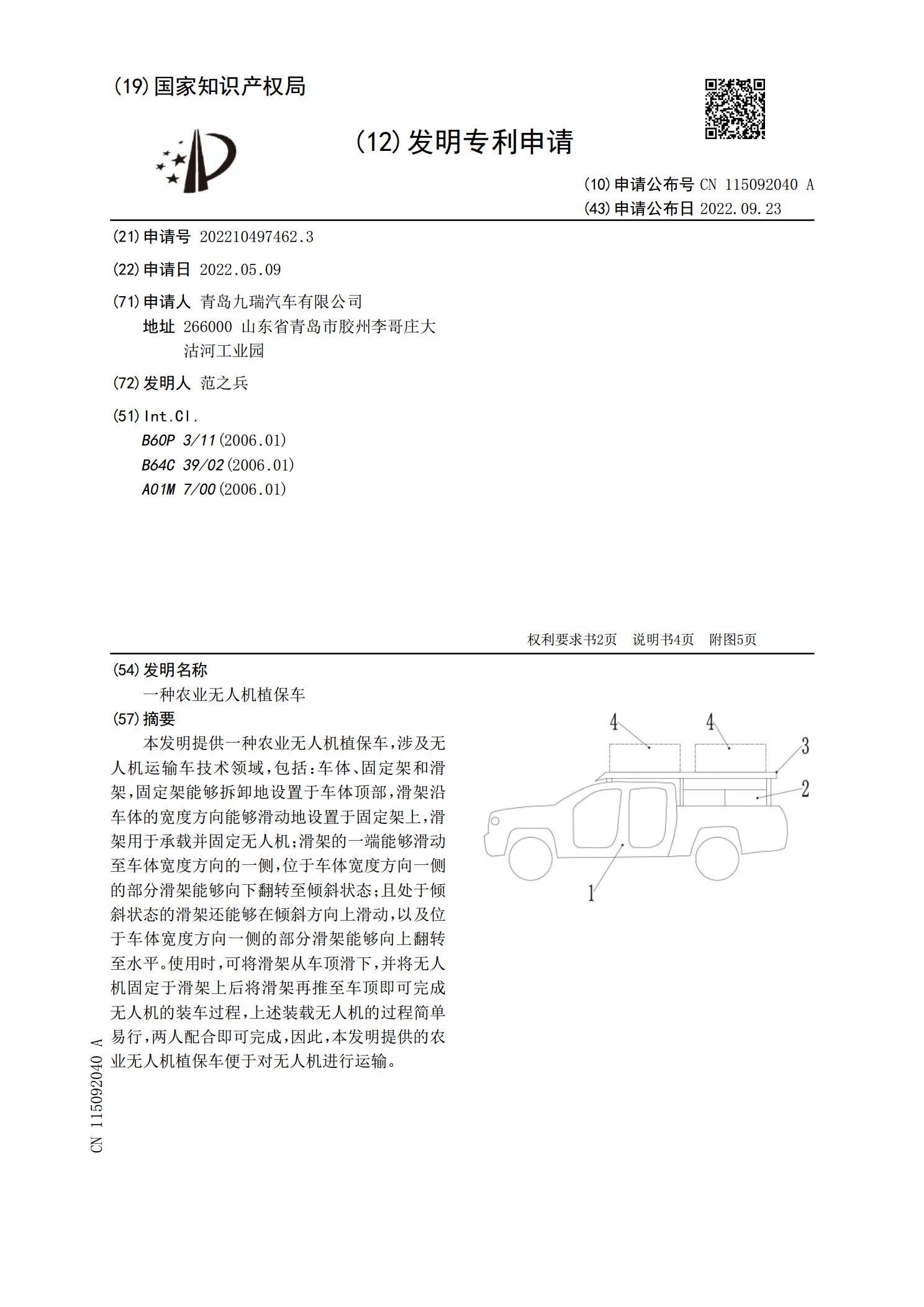
一种农业无人机植保车.pdf
本发明提供一种农业无人机植保车,涉及无人机运输车技术领域,包括:车体、固定架和滑架,固定架能够拆卸地设置于车体顶部,滑架沿车体的宽度方向能够滑动地设置于固定架上,滑架用于承载并固定无人机;滑架的一端能够滑动至车体宽度方向的一侧,位于车体宽度方向一侧的部分滑架能够向下翻转至倾斜状态;且处于倾斜状态的滑架还能够在倾斜方向上滑动,以及位于车体宽度方向一侧的部分滑架能够向上翻转至水平。使用时,可将滑架从车顶滑下,并将无人机固定于滑架上后将滑架再推至车顶即可完成无人机的装车过程,上述装载无人机的过程简单易行,两人配
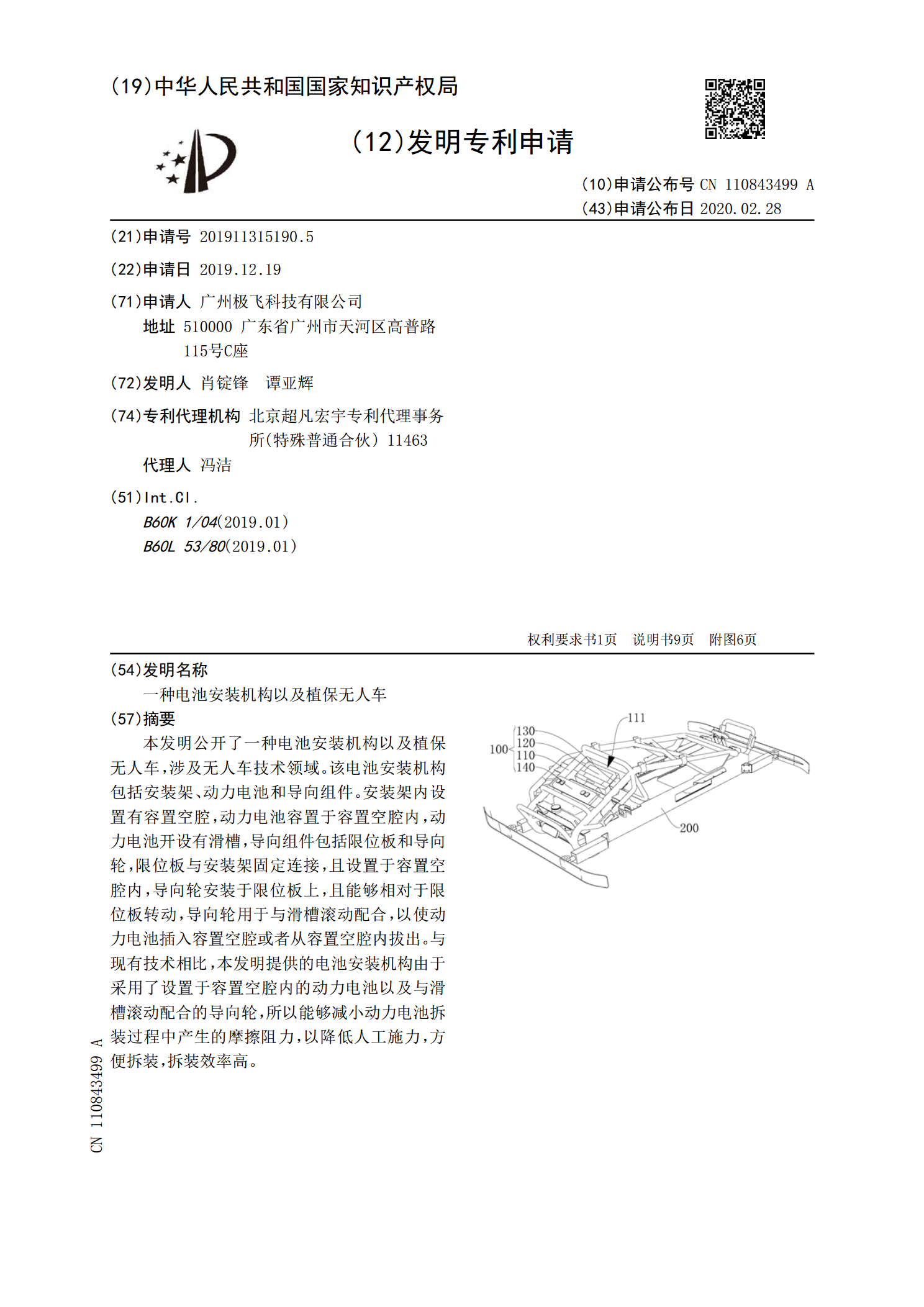
一种电池安装机构以及植保无人车.pdf
本发明公开了一种电池安装机构以及植保无人车,涉及无人车技术领域。该电池安装机构包括安装架、动力电池和导向组件。安装架内设置有容置空腔,动力电池容置于容置空腔内,动力电池开设有滑槽,导向组件包括限位板和导向轮,限位板与安装架固定连接,且设置于容置空腔内,导向轮安装于限位板上,且能够相对于限位板转动,导向轮用于与滑槽滚动配合,以使动力电池插入容置空腔或者从容置空腔内拔出。与现有技术相比,本发明提供的电池安装机构由于采用了设置于容置空腔内的动力电池以及与滑槽滚动配合的导向轮,所以能够减小动力电池拆装过程中产生的