
高地隙植保机的调平控制方法及系统.pdf

戊午****jj


1/10
2/10

3/10

4/10

5/10

6/10

7/10
8/10

9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
高地隙植保机的调平控制方法及系统.pdf
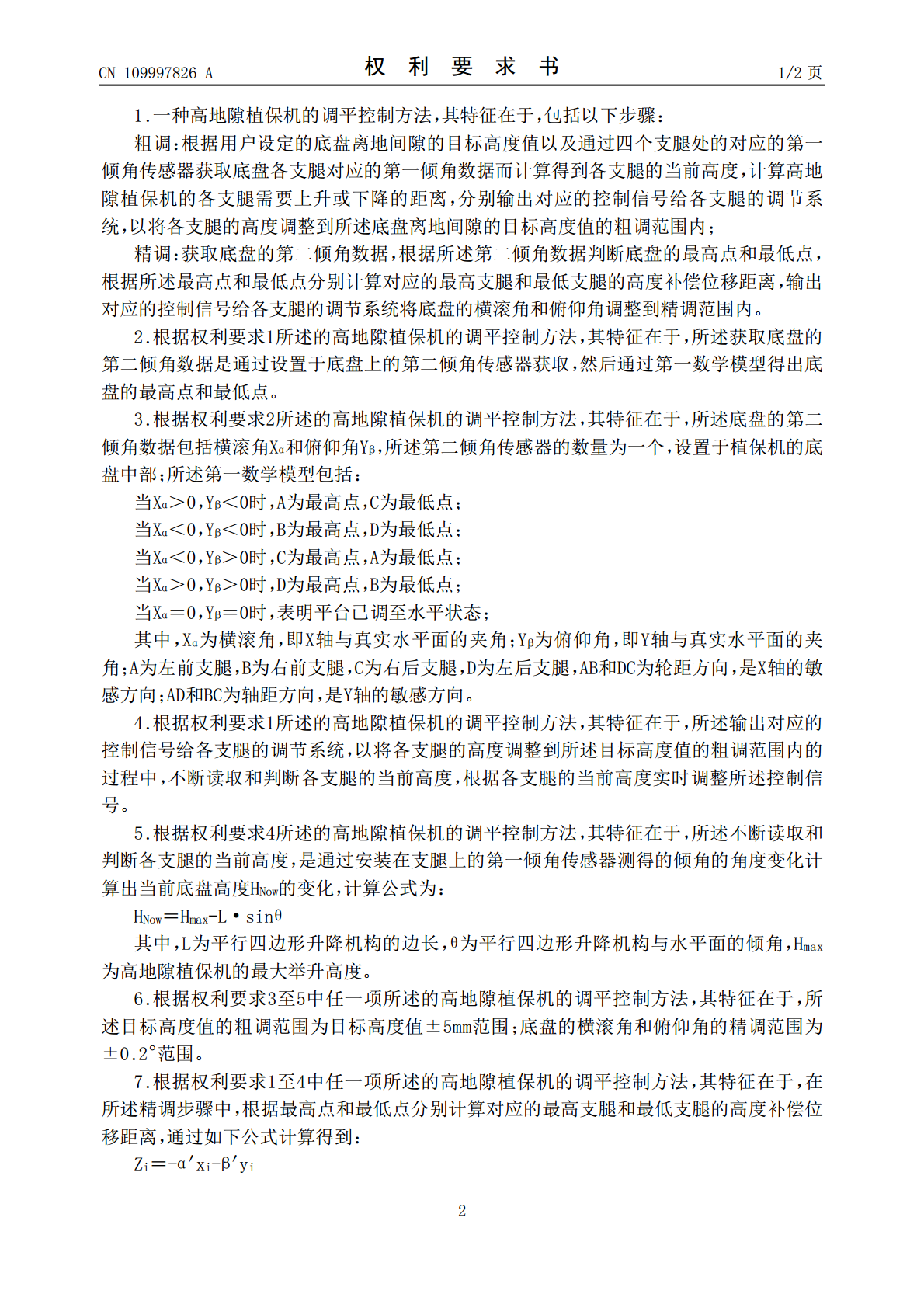
本发明公开了一种高地隙植保机的调平控制方法及系统,该方法包括以下步骤:粗调:根据用户设定的底盘离地间隙的目标高度值计算高地隙植保机的各支腿需要上升或下降的距离,分别输出对应的控制信号给各支腿的调节系统,以将各支腿的高度调整到底盘离地间隙的目标高度值的粗调范围内;精调:获取底盘的倾角数据,根据倾角数据判断底盘的最高点和最低点,根据最高点和最低点分别计算对应的最高支腿和最低支腿的高度补偿位移距离,输出对应的控制信号给各支腿的调节系统将底盘的横滚角和俯仰角调整到精调范围内。本发明得出底盘调平后的平均水平误差≤±
一种高地隙植保机的底盘结构及其调平方法.pdf
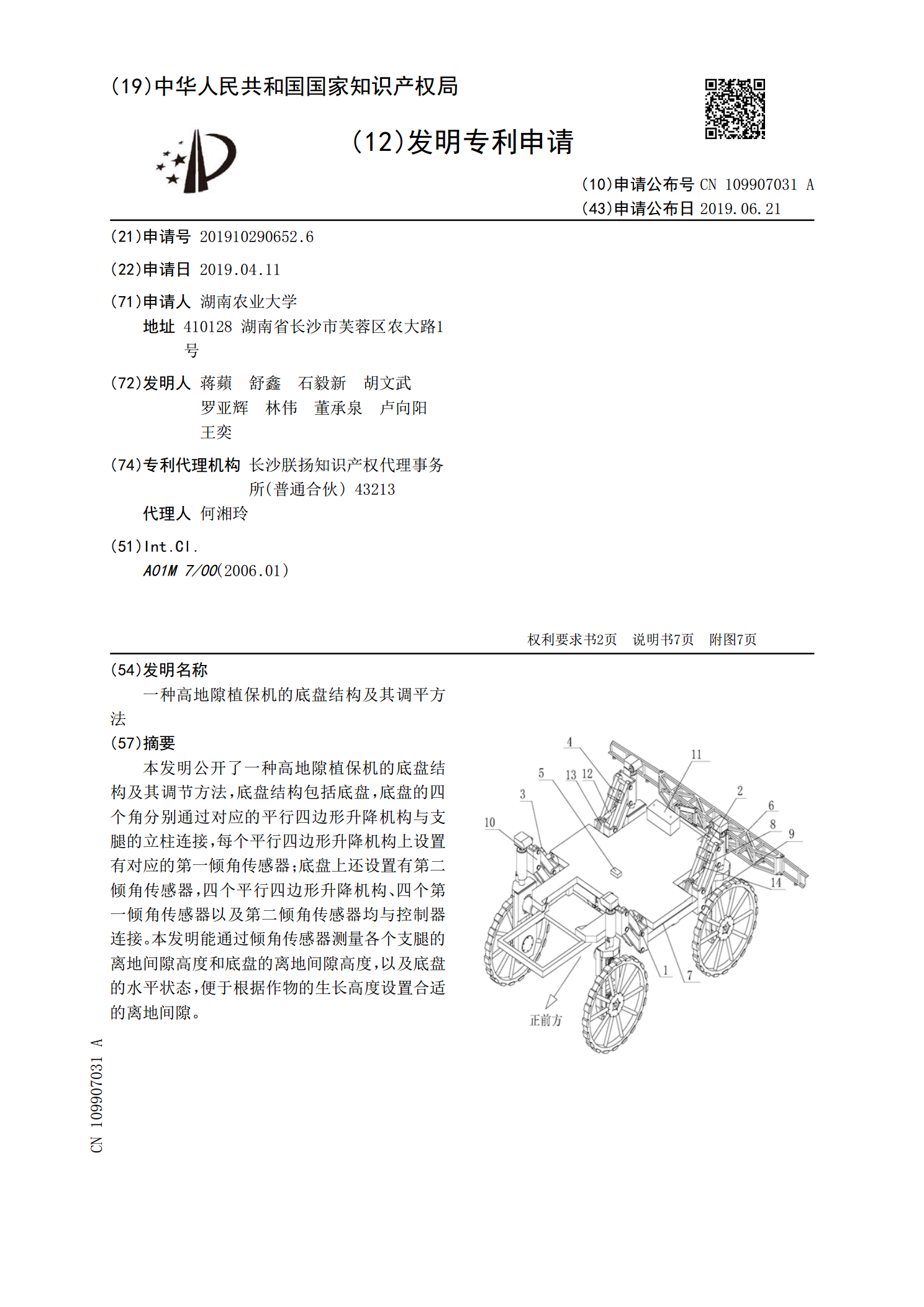
本发明公开了一种高地隙植保机的底盘结构及其调节方法,底盘结构包括底盘,底盘的四个角分别通过对应的平行四边形升降机构与支腿的立柱连接,每个平行四边形升降机构上设置有对应的第一倾角传感器;底盘上还设置有第二倾角传感器,四个平行四边形升降机构、四个第一倾角传感器以及第二倾角传感器均与控制器连接。本发明能通过倾角传感器测量各个支腿的离地间隙高度和底盘的离地间隙高度,以及底盘的水平状态,便于根据作物的生长高度设置合适的离地间隙。
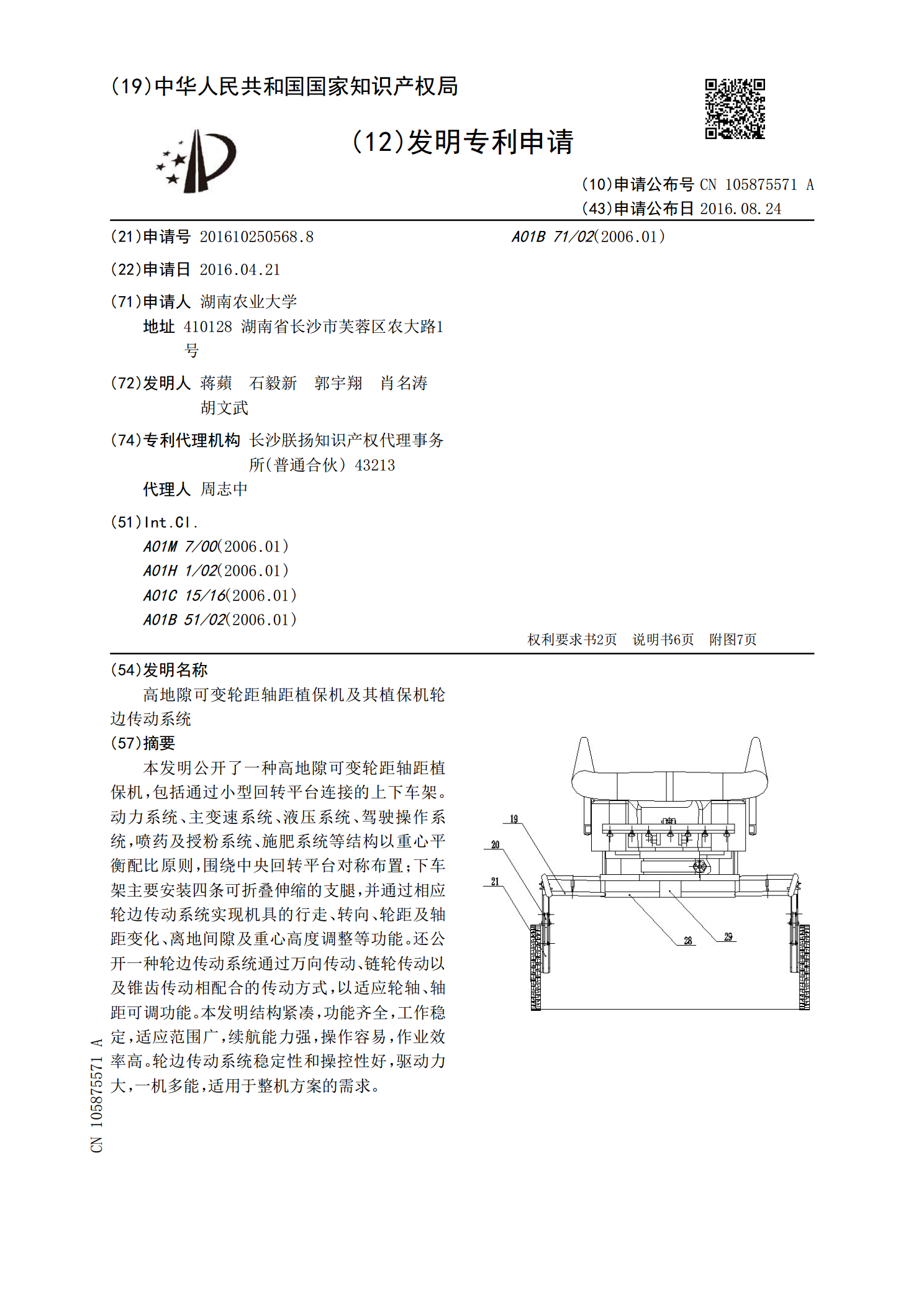
高地隙可变轮距轴距植保机及其植保机轮边传动系统.pdf
本发明公开了一种高地隙可变轮距轴距植保机,包括通过小型回转平台连接的上下车架。动力系统、主变速系统、液压系统、驾驶操作系统,喷药及授粉系统、施肥系统等结构以重心平衡配比原则,围绕中央回转平台对称布置;下车架主要安装四条可折叠伸缩的支腿,并通过相应轮边传动系统实现机具的行走、转向、轮距及轴距变化、离地间隙及重心高度调整等功能。还公开一种轮边传动系统通过万向传动、链轮传动以及锥齿传动相配合的传动方式,以适应轮轴、轴距可调功能。本发明结构紧凑,功能齐全,工作稳定,适应范围广,续航能力强,操作容易,作业效率高。轮
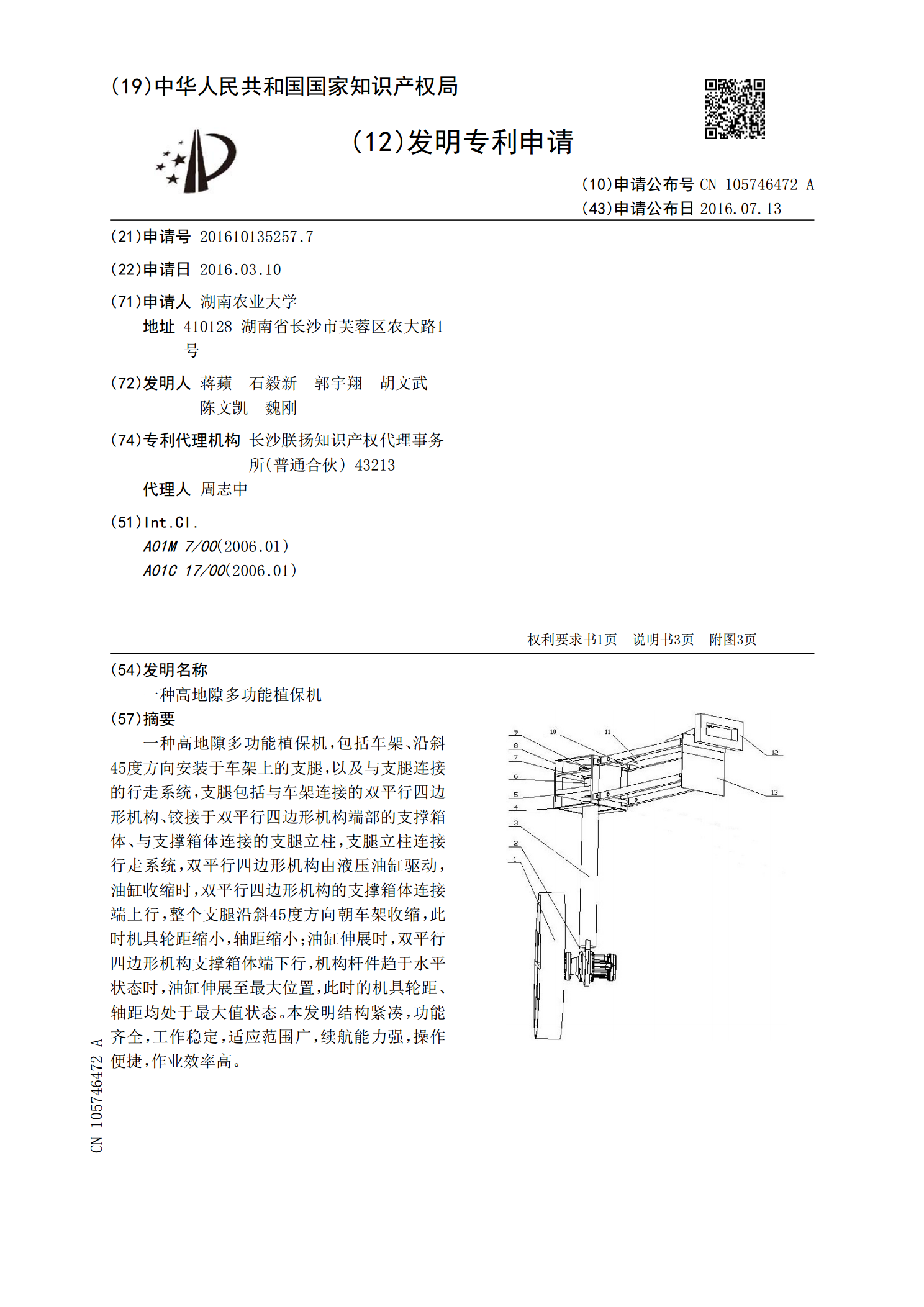
一种高地隙多功能植保机.pdf
一种高地隙多功能植保机,包括车架、沿斜45度方向安装于车架上的支腿,以及与支腿连接的行走系统,支腿包括与车架连接的双平行四边形机构、铰接于双平行四边形机构端部的支撑箱体、与支撑箱体连接的支腿立柱,支腿立柱连接行走系统,双平行四边形机构由液压油缸驱动,油缸收缩时,双平行四边形机构的支撑箱体连接端上行,整个支腿沿斜45度方向朝车架收缩,此时机具轮距缩小,轴距缩小;油缸伸展时,双平行四边形机构支撑箱体端下行,机构杆件趋于水平状态时,油缸伸展至最大位置,此时的机具轮距、轴距均处于最大值状态。本发明结构紧凑,功能齐
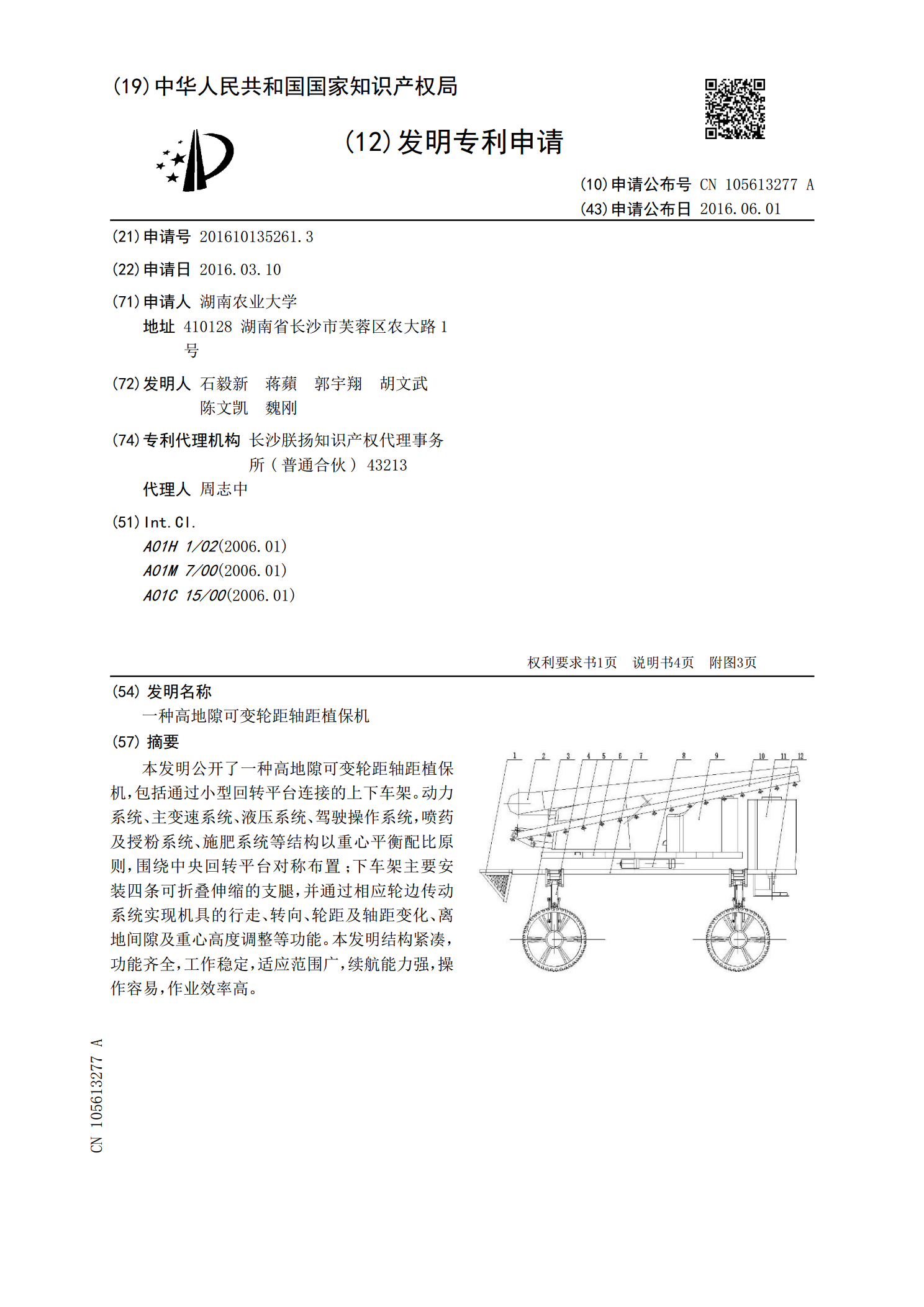
一种高地隙可变轮距轴距植保机.pdf
本发明公开了一种高地隙可变轮距轴距植保机,包括通过小型回转平台连接的上下车架。动力系统、主变速系统、液压系统、驾驶操作系统,喷药及授粉系统、施肥系统等结构以重心平衡配比原则,围绕中央回转平台对称布置;下车架主要安装四条可折叠伸缩的支腿,并通过相应轮边传动系统实现机具的行走、转向、轮距及轴距变化、离地间隙及重心高度调整等功能。本发明结构紧凑,功能齐全,工作稳定,适应范围广,续航能力强,操作容易,作业效率高。