
一种车身姿态自调整控制系统.pdf

小新****ou


1/10
2/10
3/10
4/10
5/10
6/10

7/10
8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种车身姿态自调整控制系统.pdf
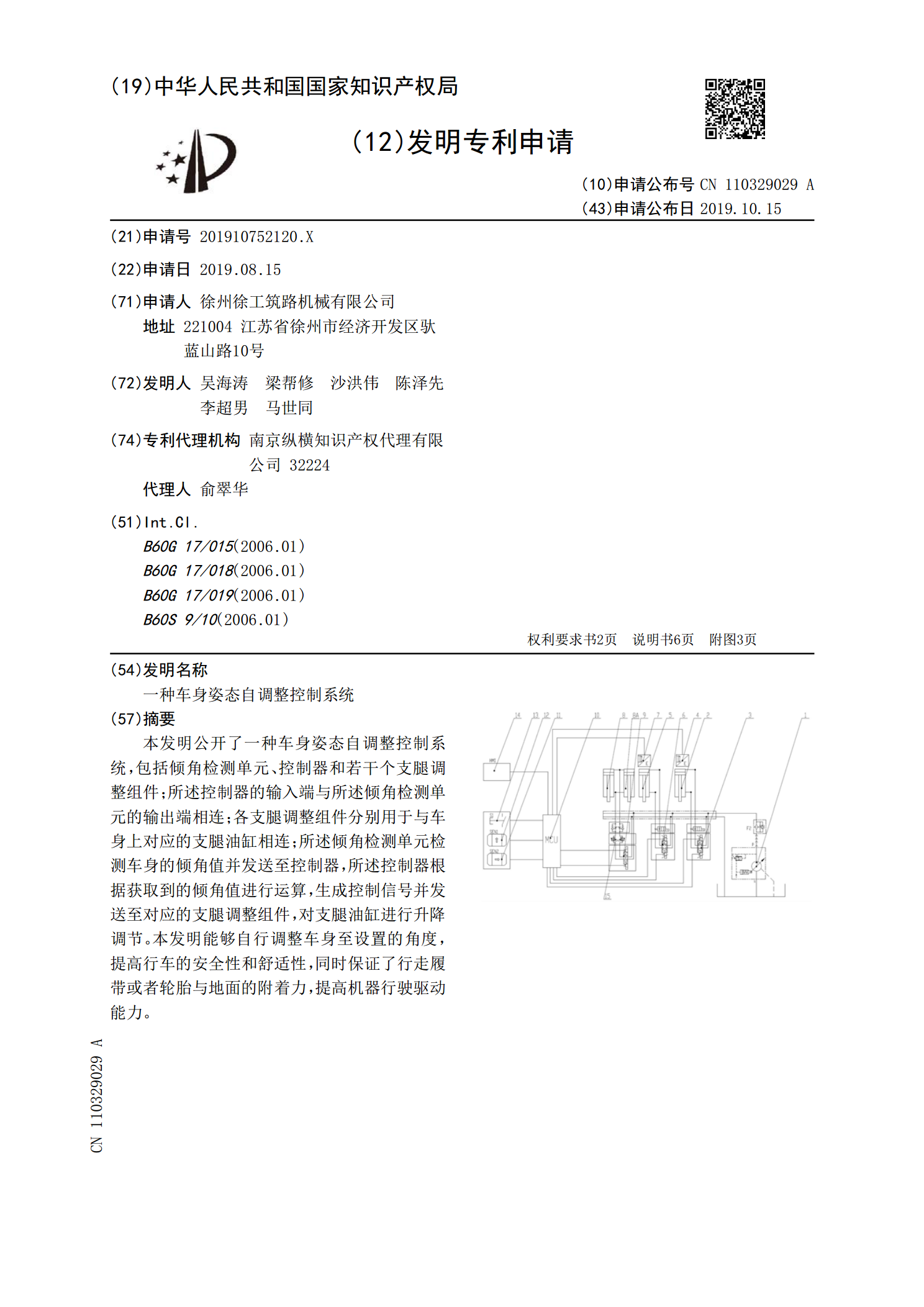
本发明公开了一种车身姿态自调整控制系统,包括倾角检测单元、控制器和若干个支腿调整组件;所述控制器的输入端与所述倾角检测单元的输出端相连;各支腿调整组件分别用于与车身上对应的支腿油缸相连;所述倾角检测单元检测车身的倾角值并发送至控制器,所述控制器根据获取到的倾角值进行运算,生成控制信号并发送至对应的支腿调整组件,对支腿油缸进行升降调节。本发明能够自行调整车身至设置的角度,提高行车的安全性和舒适性,同时保证了行走履带或者轮胎与地面的附着力,提高机器行驶驱动能力。
一种丘陵山地拖拉机车身姿态调整装置及调整方法.pdf
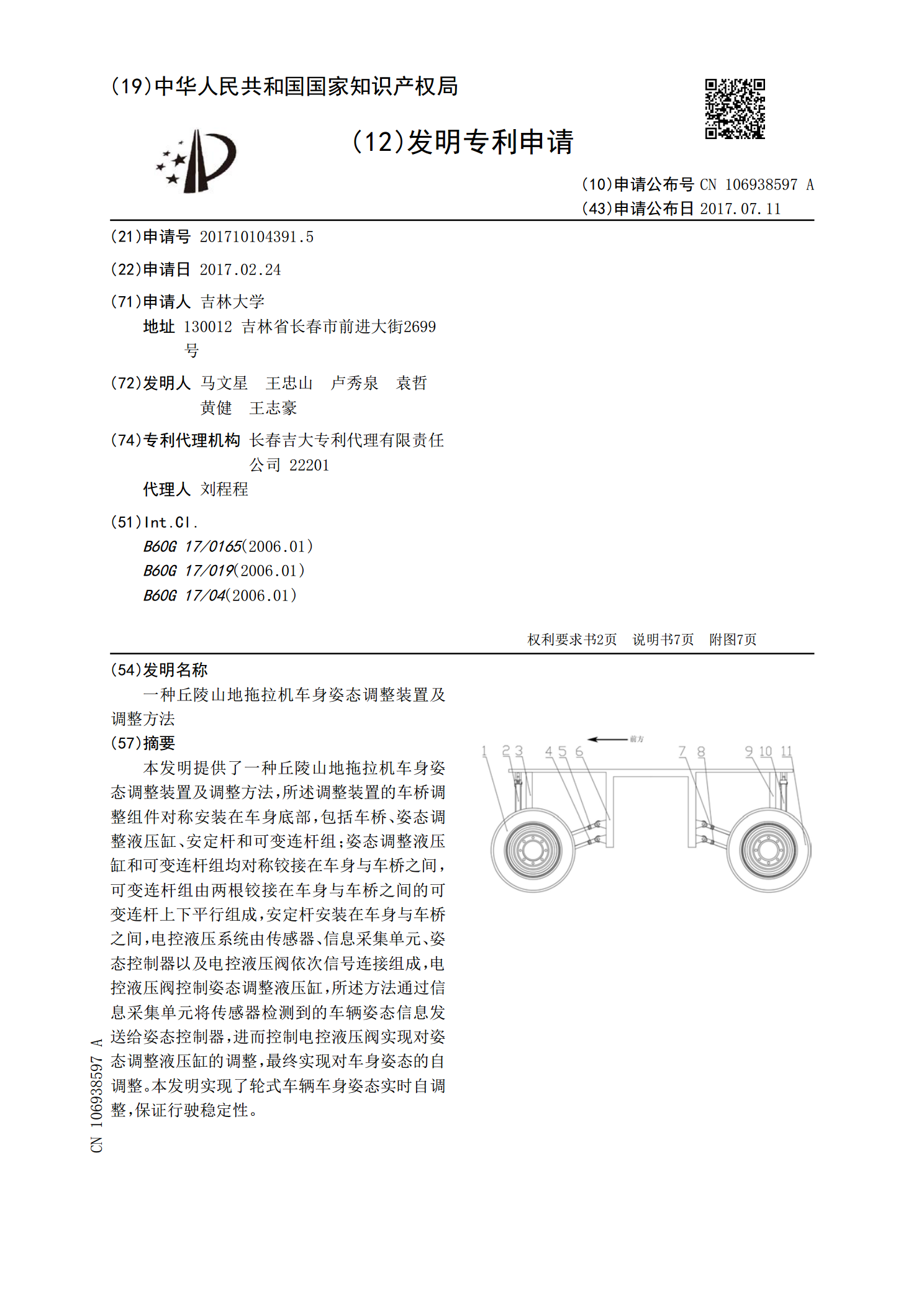
本发明提供了一种丘陵山地拖拉机车身姿态调整装置及调整方法,所述调整装置的车桥调整组件对称安装在车身底部,包括车桥、姿态调整液压缸、安定杆和可变连杆组;姿态调整液压缸和可变连杆组均对称铰接在车身与车桥之间,可变连杆组由两根铰接在车身与车桥之间的可变连杆上下平行组成,安定杆安装在车身与车桥之间,电控液压系统由传感器、信息采集单元、姿态控制器以及电控液压阀依次信号连接组成,电控液压阀控制姿态调整液压缸,所述方法通过信息采集单元将传感器检测到的车辆姿态信息发送给姿态控制器,进而控制电控液压阀实现对姿态调整液压缸的

一种轮式护理机器人姿态调整控制系统.pdf
本发明公开了一种轮式护理机器人姿态调整控制系统,旨在提供一种可以利用安卓系统和IOS系统客户端软件控制轮式护理机器人的站姿,坐姿,躺姿三种姿态的调整系统,包括机械结构和电气控制系统。其技术方案的要点是,客户端软件发出指令到电气控制系统,电气控制系统操纵与电气控制系统相连接的机械结构动作,实现轮式护理机器人三种姿态的调整。本发明适用于下肢残障人士和腿脚活动不便的老年人。
一种卫星姿态调整工装.pdf
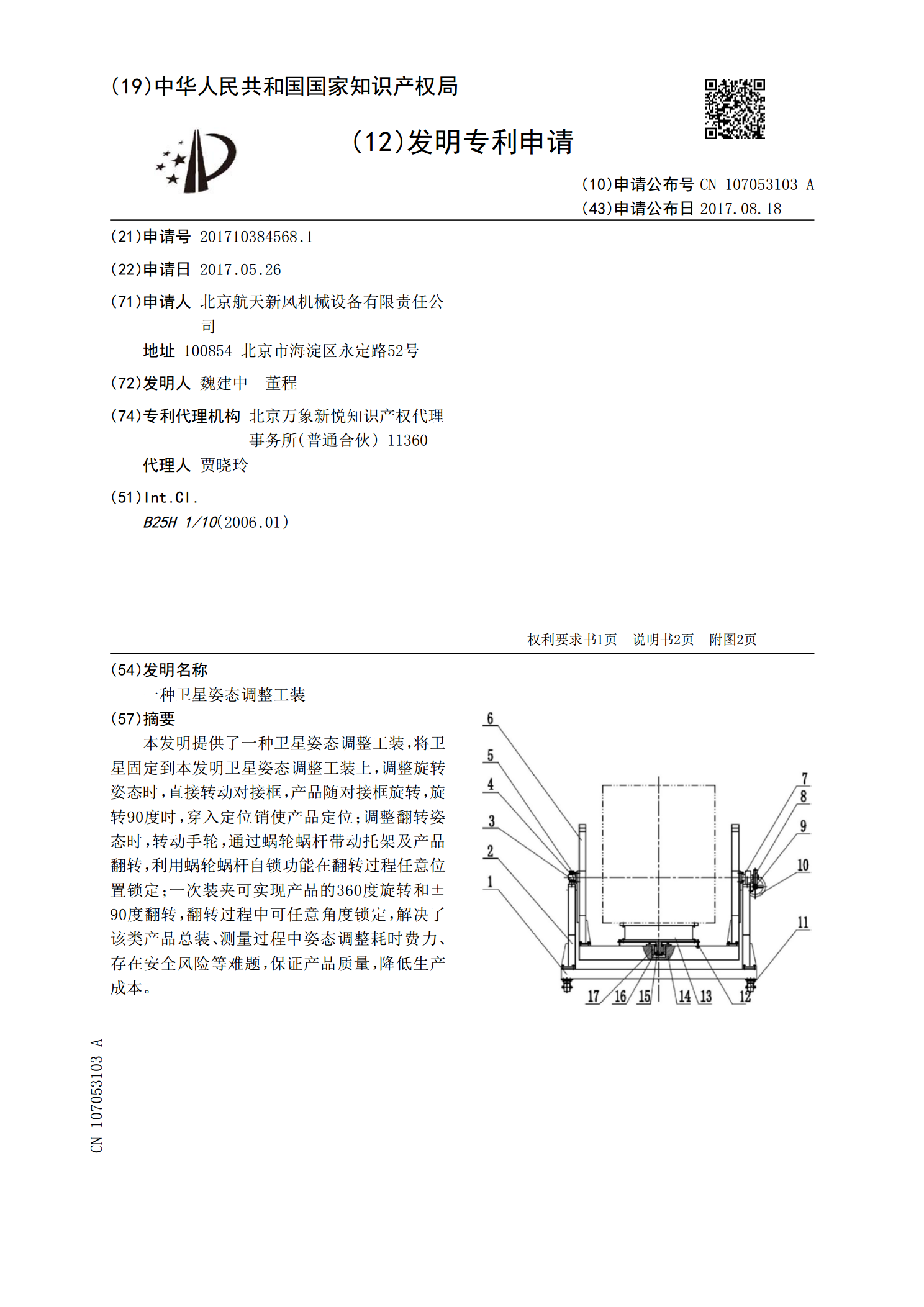
本发明提供了一种卫星姿态调整工装,将卫星固定到本发明卫星姿态调整工装上,调整旋转姿态时,直接转动对接框,产品随对接框旋转,旋转90度时,穿入定位销使产品定位;调整翻转姿态时,转动手轮,通过蜗轮蜗杆带动托架及产品翻转,利用蜗轮蜗杆自锁功能在翻转过程任意位置锁定;一次装夹可实现产品的360度旋转和±90度翻转,翻转过程中可任意角度锁定,解决了该类产品总装、测量过程中姿态调整耗时费力、存在安全风险等难题,保证产品质量,降低生产成本。
一种卫星姿态调整工装.pdf
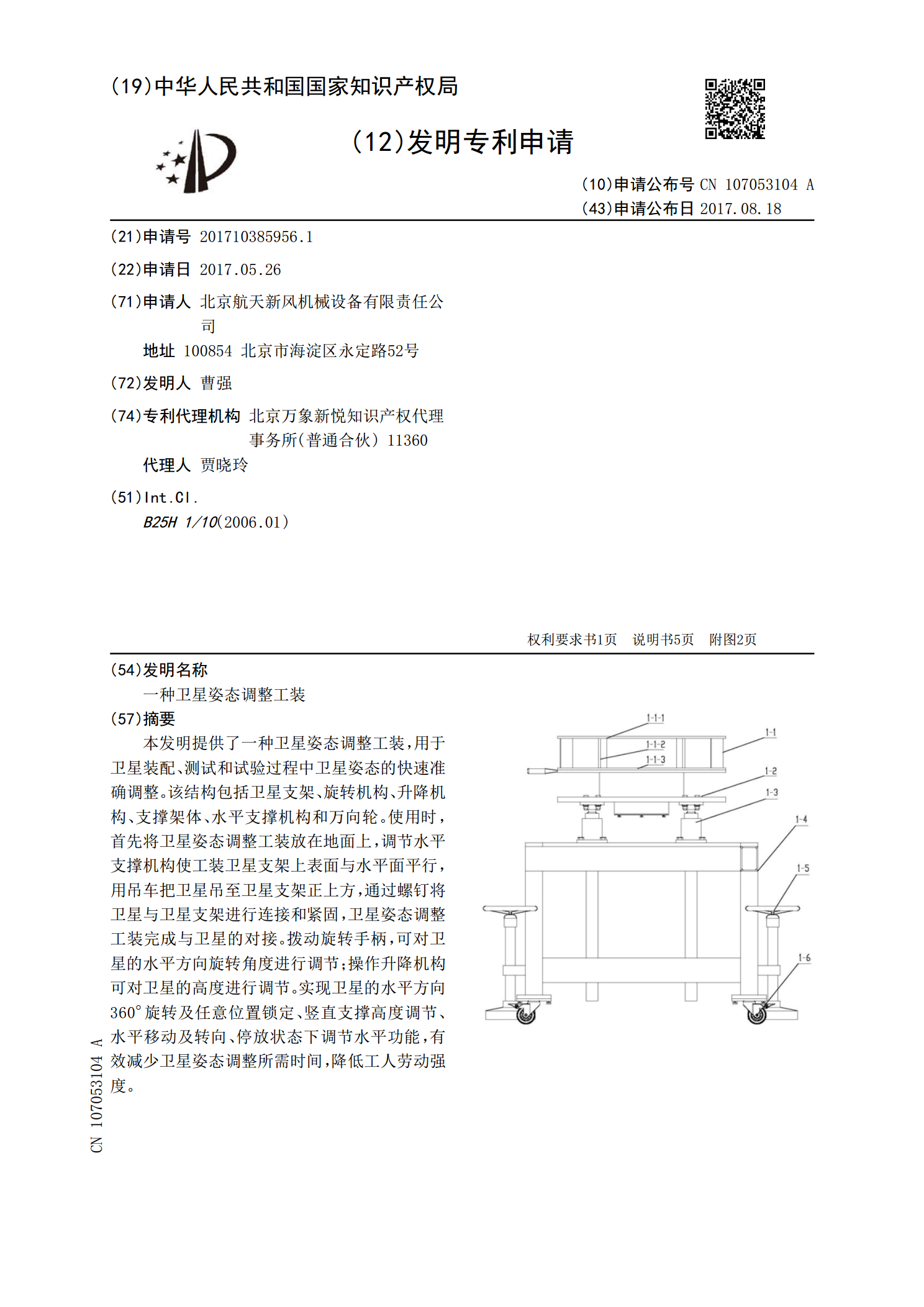
本发明提供了一种卫星姿态调整工装,用于卫星装配、测试和试验过程中卫星姿态的快速准确调整。该结构包括卫星支架、旋转机构、升降机构、支撑架体、水平支撑机构和万向轮。使用时,首先将卫星姿态调整工装放在地面上,调节水平支撑机构使工装卫星支架上表面与水平面平行,用吊车把卫星吊至卫星支架正上方,通过螺钉将卫星与卫星支架进行连接和紧固,卫星姿态调整工装完成与卫星的对接。拨动旋转手柄,可对卫星的水平方向旋转角度进行调节;操作升降机构可对卫星的高度进行调节。实现卫星的水平方向360°旋转及任意位置锁定、竖直支撑高度调节、水