
底盘组件及其控制方法、搬运车、建筑机器人.pdf

Ja****44

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10

10/10
亲,该文档总共24页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
底盘组件及其控制方法、搬运车、建筑机器人.pdf
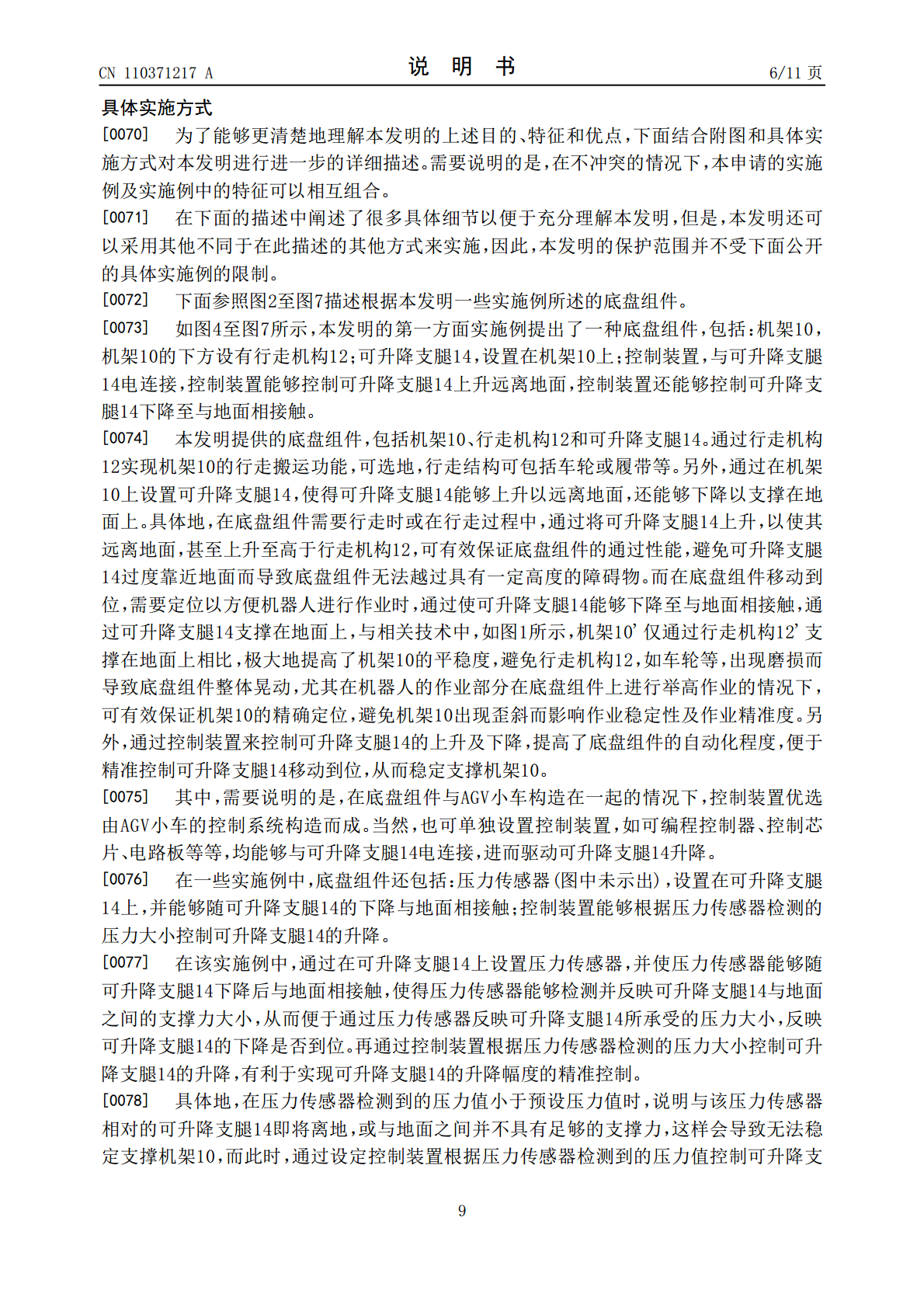
本发明提供了一种底盘组件及其控制方法、搬运车、建筑机器人。其中,底盘组件包括:机架,机架的下方设有行走机构;可升降支腿,设置在机架上;控制装置,与可升降支腿电连接,控制装置能够控制可升降支腿上升远离地面,控制装置还能够控制可升降支腿下降至与地面相接触。通过将可升降支腿上升,以使其远离地面,可有效保证底盘组件的通过性能,避免可升降支腿过度靠近地面而导致底盘组件无法越过具有一定高度的障碍物。而通过使可升降支腿能够下降至与地面相接触,通过可升降支腿支撑在地面上,与仅通过行走机构支撑在地面上相比,极大地提高了机架
一种机器人底盘及其控制方法.pdf
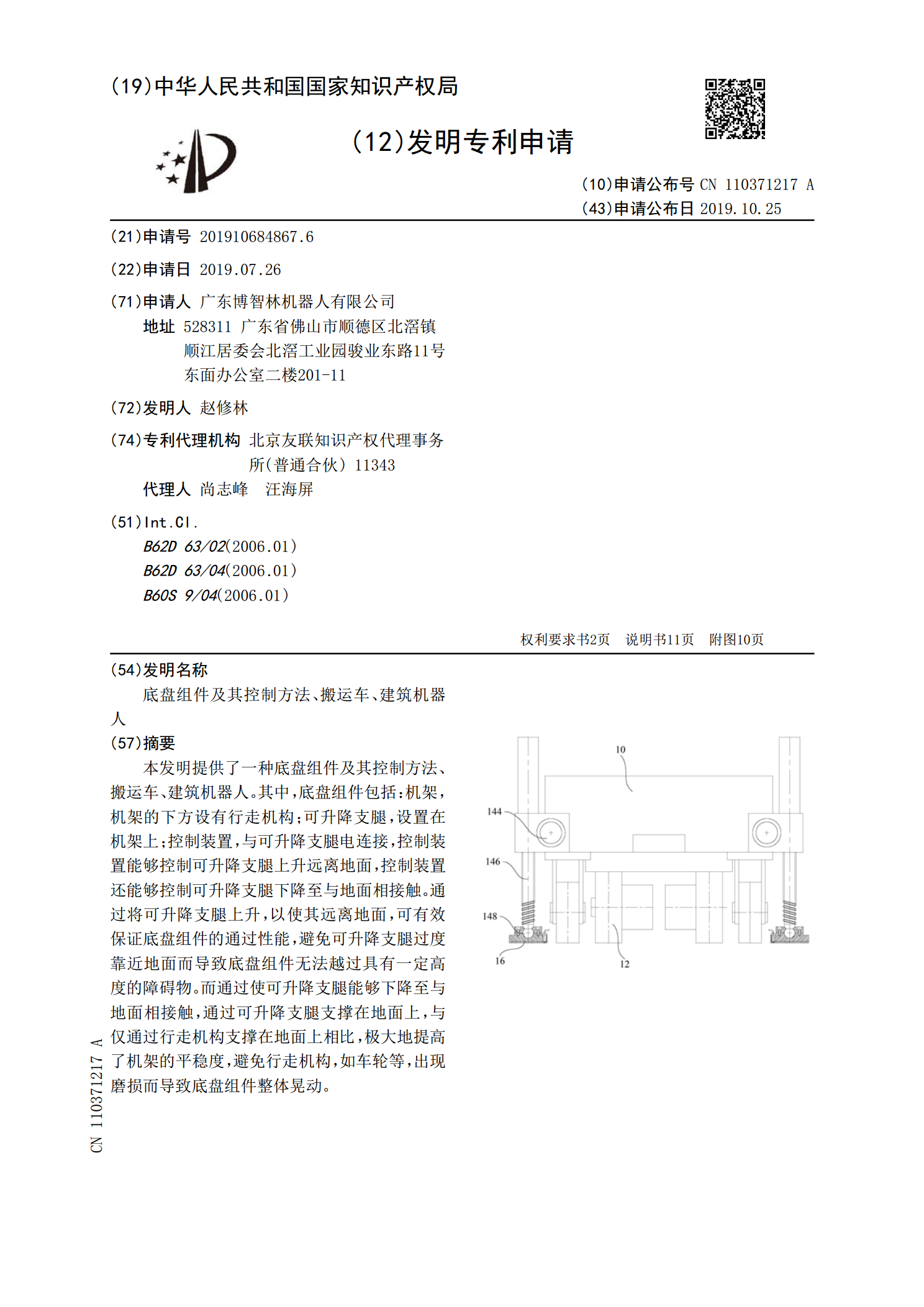
本发明公开了一种机器人底盘及其控制方法,涉及机器人技术领域,包括:底盘和滚动装置,底盘包括底盘支架、两个脚踏装置和脚踏感应装置,底盘支架上部还设有脚踏支撑部,脚踏装置设置在脚踏支撑部上,脚踏感应装置设置在脚踏装置和脚踏支撑部之间;滚动装置包括主动轮和辅助轮,主动轮可转动设置在底盘支架左右两侧,第一辅助轮和第二辅助轮分别可转动设置在底盘支架前后两侧,机器人底盘还包括辅助轮感应装置,辅助轮感应装置用于感测第一辅助轮和第二辅助轮的压力信息;本发明通过辅助轮的设计大大提高了机器人底盘的稳定性和安全性,同时在辅助轮
机器人承重底盘组件及机器人.pdf
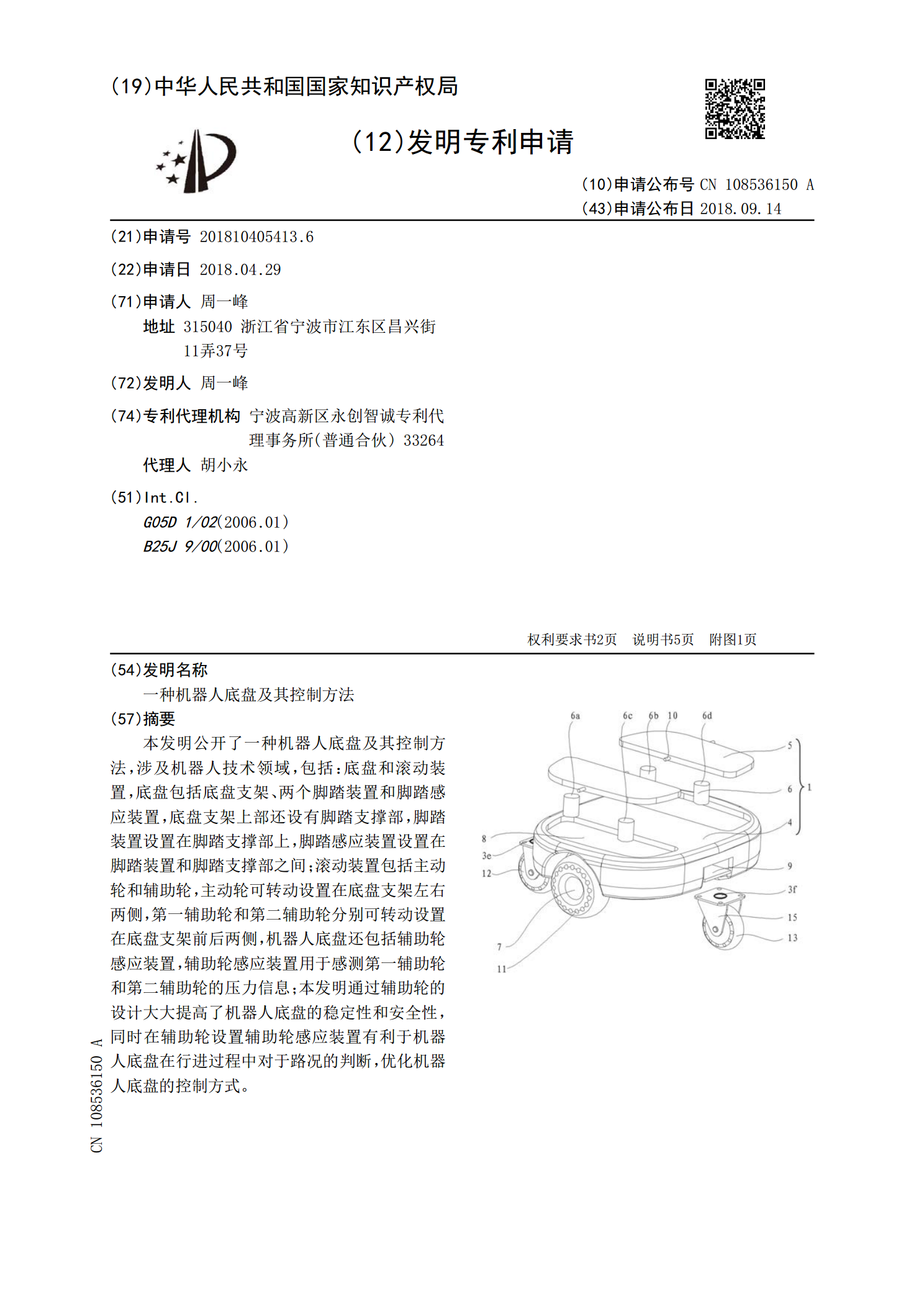
本发明公开一种机器人承重底盘组件及机器人,机器人承重底盘组件包括:底盘,底盘具有安装区;滚轮,连接于安装区,用以驱动机器人承重底盘组件移动;支撑板,安装于底盘并与安装区对应,用以与底盘共同支撑滚轮。本发明机器人承重底盘组件通过在底盘的安装区设置支撑板,使得支撑板能和底盘共同支撑滚轮,从而减少了轮组对底盘的作用压强,避免底盘损坏,提高了底盘的稳定性,从而提高机器人承重底盘组件整体的稳定性。
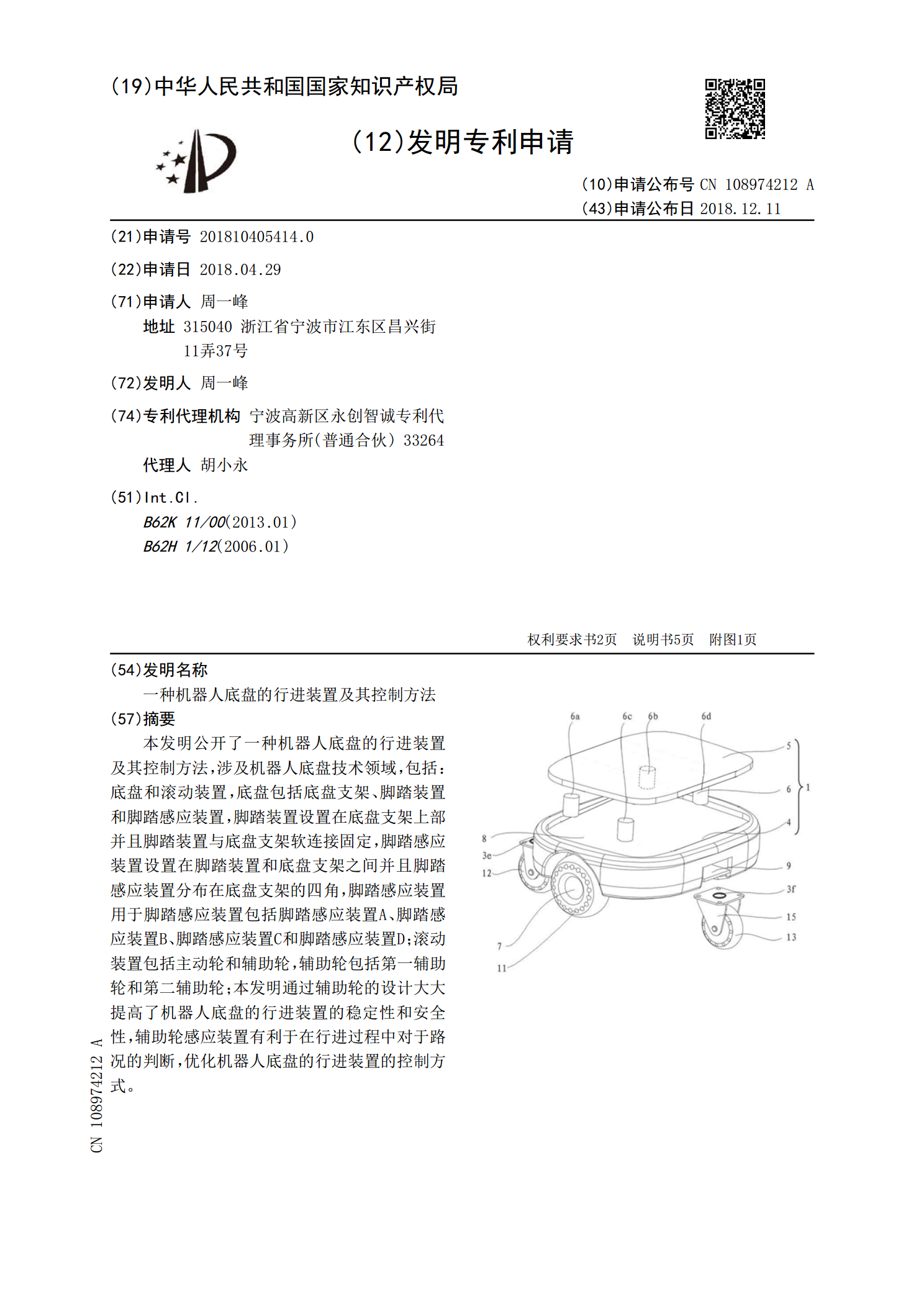
一种机器人底盘的行进装置及其控制方法.pdf
本发明公开了一种机器人底盘的行进装置及其控制方法,涉及机器人底盘技术领域,包括:底盘和滚动装置,底盘包括底盘支架、脚踏装置和脚踏感应装置,脚踏装置设置在底盘支架上部并且脚踏装置与底盘支架软连接固定,脚踏感应装置设置在脚踏装置和底盘支架之间并且脚踏感应装置分布在底盘支架的四角,脚踏感应装置用于脚踏感应装置包括脚踏感应装置A、脚踏感应装置B、脚踏感应装置C和脚踏感应装置D;滚动装置包括主动轮和辅助轮,辅助轮包括第一辅助轮和第二辅助轮;本发明通过辅助轮的设计大大提高了机器人底盘的行进装置的稳定性和安全性,辅助轮
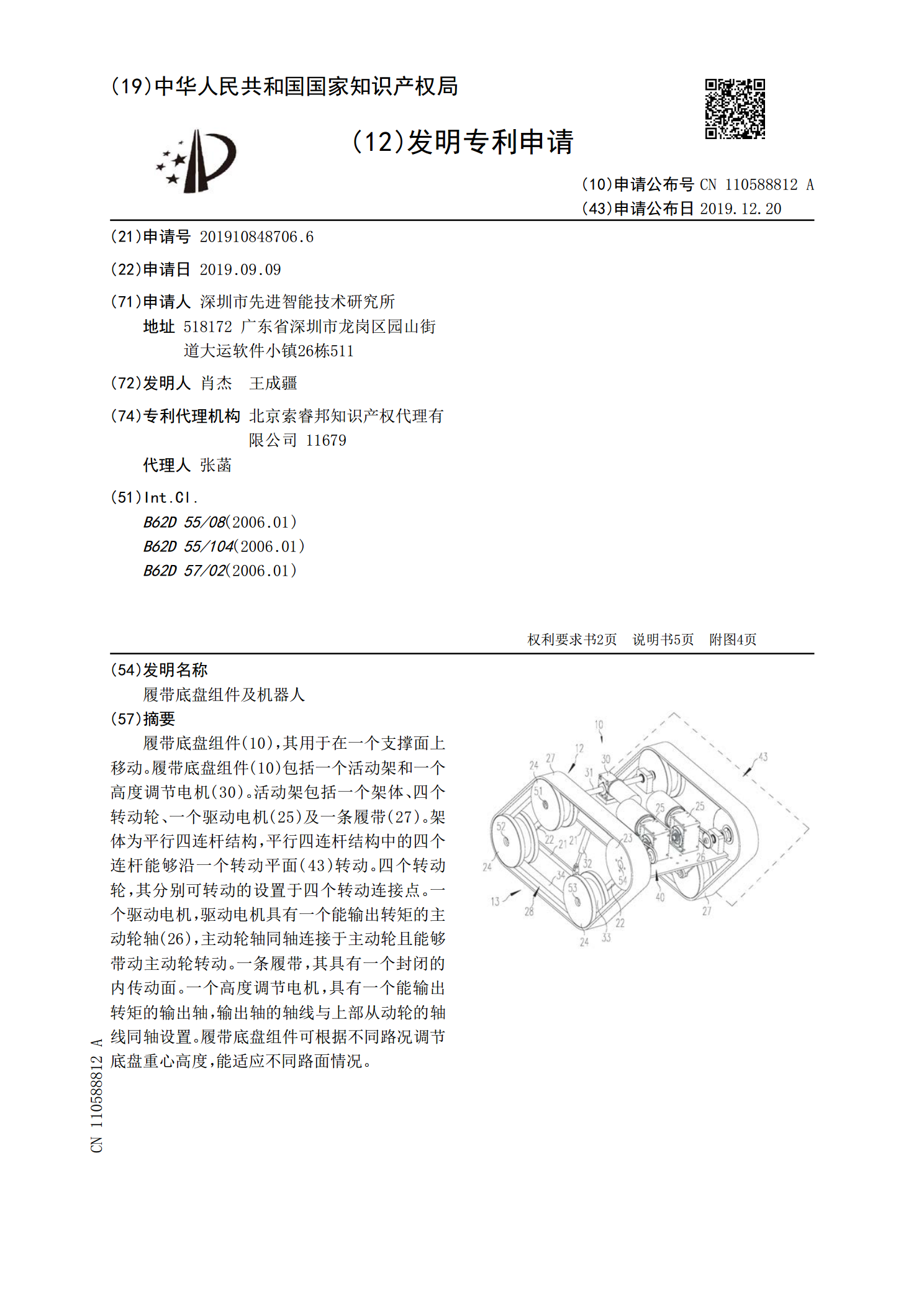
履带底盘组件及机器人.pdf
履带底盘组件(10),其用于在一个支撑面上移动。履带底盘组件(10)包括一个活动架和一个高度调节电机(30)。活动架包括一个架体、四个转动轮、一个驱动电机(25)及一条履带(27)。架体为平行四连杆结构,平行四连杆结构中的四个连杆能够沿一个转动平面(43)转动。四个转动轮,其分别可转动的设置于四个转动连接点。一个驱动电机,驱动电机具有一个能输出转矩的主动轮轴(26),主动轮轴同轴连接于主动轮且能够带动主动轮转动。一条履带,其具有一个封闭的内传动面。一个高度调节电机,具有一个能输出转矩的输出轴,输出轴的轴线