
一种机器人底盘及其控制方法.pdf

运升****魔王

1/9
2/9
3/9
4/9
5/9
6/9
7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种机器人底盘及其控制方法.pdf
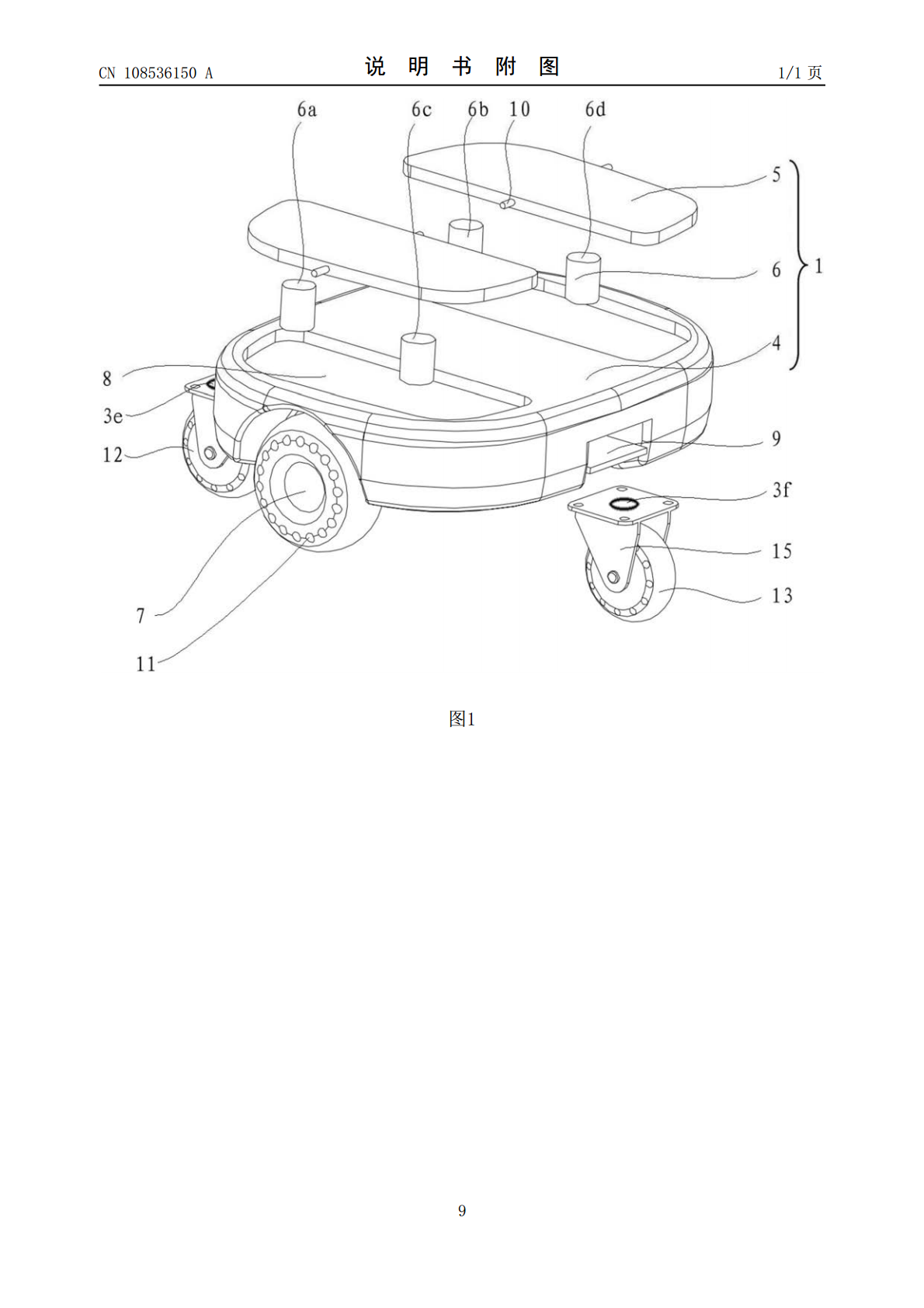
本发明公开了一种机器人底盘及其控制方法,涉及机器人技术领域,包括:底盘和滚动装置,底盘包括底盘支架、两个脚踏装置和脚踏感应装置,底盘支架上部还设有脚踏支撑部,脚踏装置设置在脚踏支撑部上,脚踏感应装置设置在脚踏装置和脚踏支撑部之间;滚动装置包括主动轮和辅助轮,主动轮可转动设置在底盘支架左右两侧,第一辅助轮和第二辅助轮分别可转动设置在底盘支架前后两侧,机器人底盘还包括辅助轮感应装置,辅助轮感应装置用于感测第一辅助轮和第二辅助轮的压力信息;本发明通过辅助轮的设计大大提高了机器人底盘的稳定性和安全性,同时在辅助轮
一种机器人底盘的行进装置及其控制方法.pdf
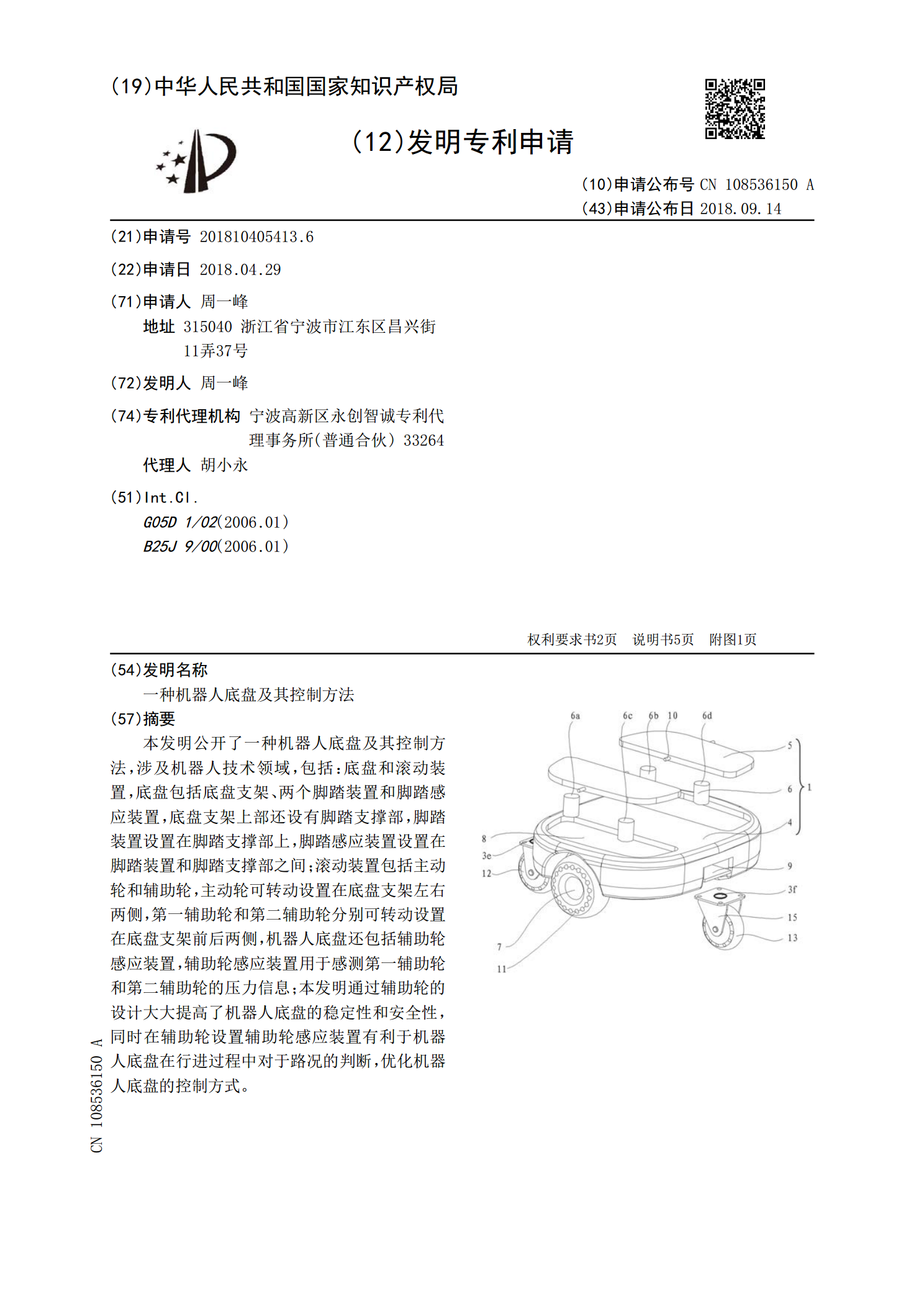
本发明公开了一种机器人底盘的行进装置及其控制方法,涉及机器人底盘技术领域,包括:底盘和滚动装置,底盘包括底盘支架、脚踏装置和脚踏感应装置,脚踏装置设置在底盘支架上部并且脚踏装置与底盘支架软连接固定,脚踏感应装置设置在脚踏装置和底盘支架之间并且脚踏感应装置分布在底盘支架的四角,脚踏感应装置用于脚踏感应装置包括脚踏感应装置A、脚踏感应装置B、脚踏感应装置C和脚踏感应装置D;滚动装置包括主动轮和辅助轮,辅助轮包括第一辅助轮和第二辅助轮;本发明通过辅助轮的设计大大提高了机器人底盘的行进装置的稳定性和安全性,辅助轮
一种巡检机器人的底盘及底盘的控制方法.pdf
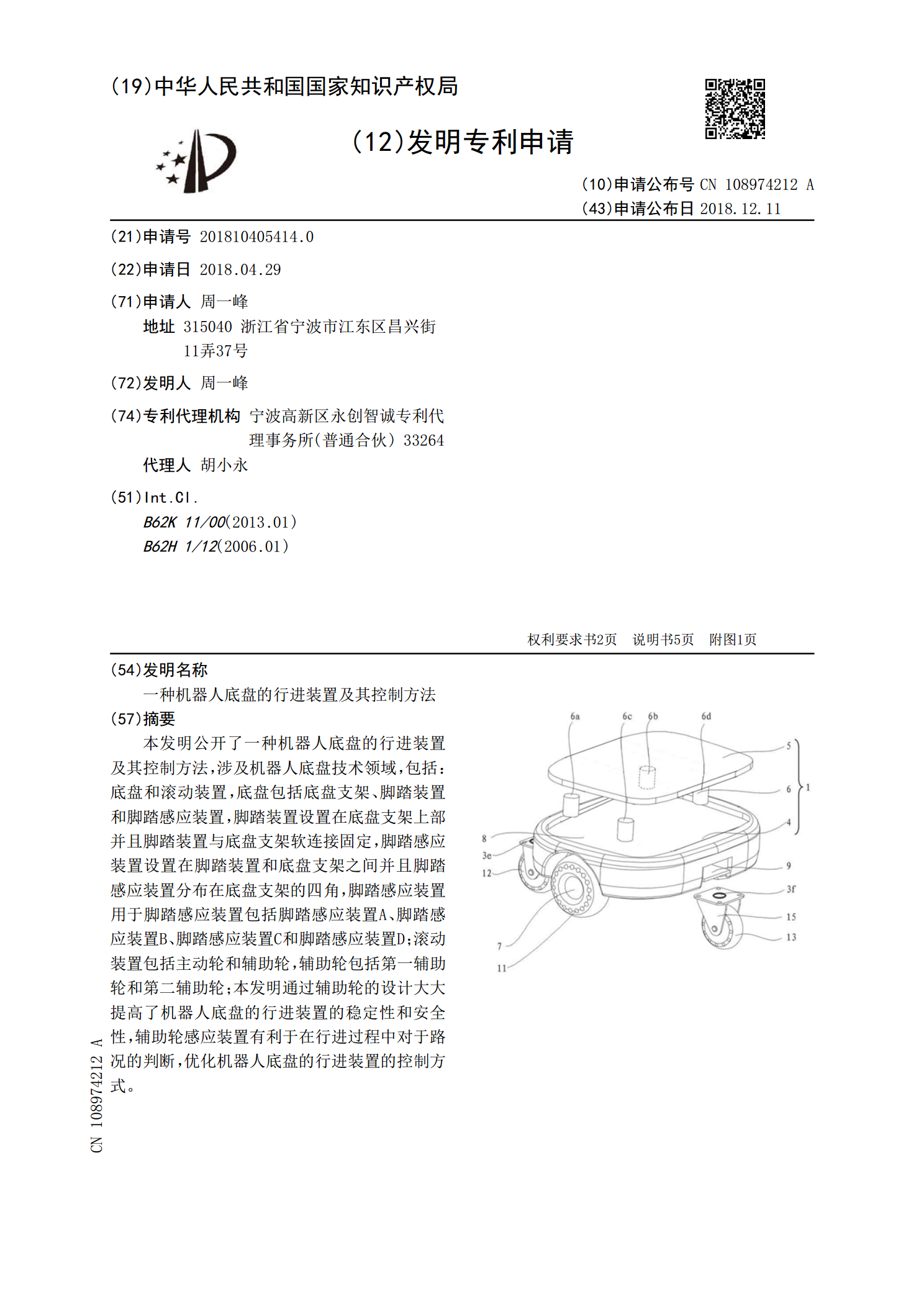
本申请公开了一种巡检机器人的底盘,所述底盘包括:通信器,用于接收所述巡检机器人的移动路线;处理器,用于根据所述移动路线生成电机控制指令;信号转换器,用于根据所述电机控制指令输出对应的第一电机电流和第二电机电流;其中,所述第一电机电流为第一轮毂电机的工作电流和第二电机电流为第二轮毂电机的工作电流;第一轮毂电机,用于利用所述第一电机电流控制驱动第一轮毂转动;第二轮毂电机,用于利用所述第二电机电流控制驱动第二轮毂转动。本申请能够提高巡检机器人的灵活性、降低作业空间需求。本申请还公开了一种巡检机器人的底盘的控制方
一种智能打磨机器人全向底盘装置及其控制方法.pdf
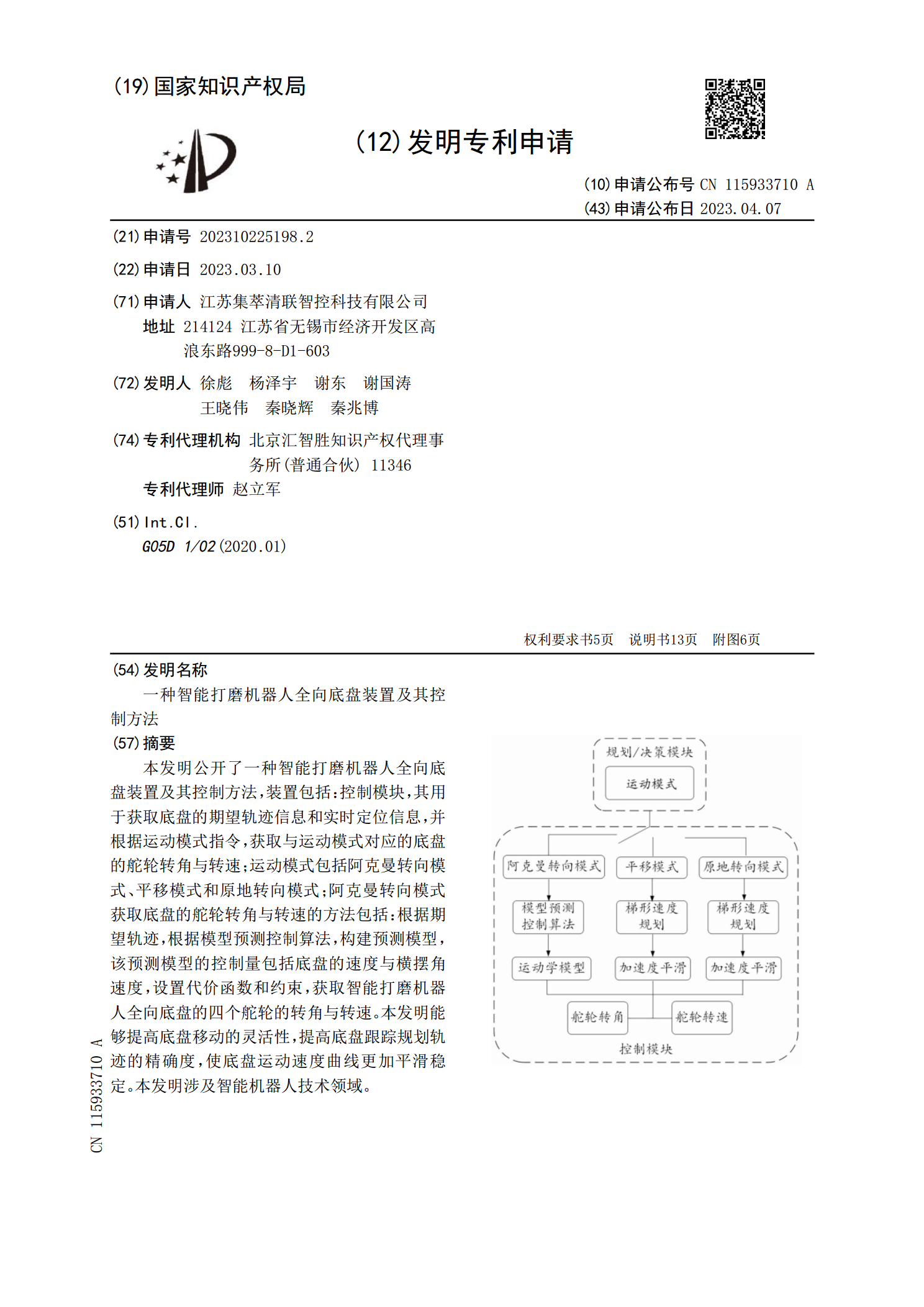
本发明公开了一种智能打磨机器人全向底盘装置及其控制方法,装置包括:控制模块,其用于获取底盘的期望轨迹信息和实时定位信息,并根据运动模式指令,获取与运动模式对应的底盘的舵轮转角与转速;运动模式包括阿克曼转向模式、平移模式和原地转向模式;阿克曼转向模式获取底盘的舵轮转角与转速的方法包括:根据期望轨迹,根据模型预测控制算法,构建预测模型,该预测模型的控制量包括底盘的速度与横摆角速度,设置代价函数和约束,获取智能打磨机器人全向底盘的四个舵轮的转角与转速。本发明能够提高底盘移动的灵活性,提高底盘跟踪规划轨迹的精确度
一种全向移动底盘及其控制方法.pdf
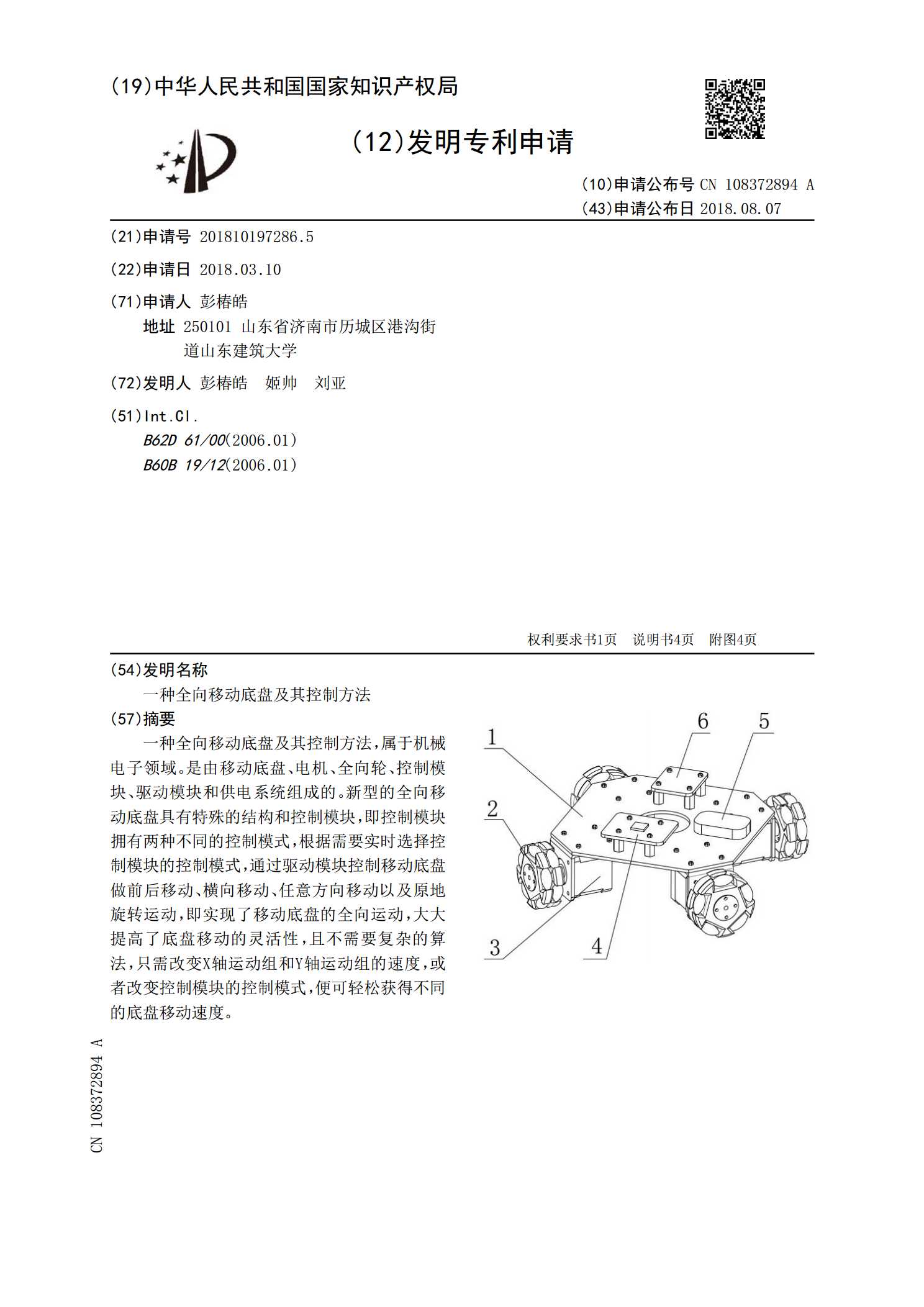
一种全向移动底盘及其控制方法,属于机械电子领域。是由移动底盘、电机、全向轮、控制模块、驱动模块和供电系统组成的。新型的全向移动底盘具有特殊的结构和控制模块,即控制模块拥有两种不同的控制模式,根据需要实时选择控制模块的控制模式,通过驱动模块控制移动底盘做前后移动、横向移动、任意方向移动以及原地旋转运动,即实现了移动底盘的全向运动,大大提高了底盘移动的灵活性,且不需要复杂的算法,只需改变X轴运动组和Y轴运动组的速度,或者改变控制模块的控制模式,便可轻松获得不同的底盘移动速度。