
一种基于倾角补偿的调平控制系统及其方法.pdf

努力****恨风


1/8

2/8

3/8

4/8

5/8

6/8

7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种基于倾角补偿的调平控制系统及其方法.pdf
本发明公开了一种基于倾角补偿的调平控制系统及其方法,属于汽车底盘调平控制系统技术领域,包括底盘、多根调平支腿、多个倾角传感器、液压阀组和调平控制器,调平支腿均匀对称的分布于底盘平面四角,每根调平支腿上均设置有压力传感器,倾角传感器分别安装于底盘平面的中心以及底盘平面前端位置,液压阀组用于分别控制调平支腿的伸出,调平控制器分别与倾角传感器、压力传感器以及液压阀组相连接。本发明采用四点调平控制模型算法,通过倾角传感器实时采集底盘平面与水平面的倾角差值,并在调平过程中通过辅助控制的方式,实时保持底盘前部平面在调

一种基于倾角传感器的伺服调平系统设计.docx
一种基于倾角传感器的伺服调平系统设计摘要:伺服系统广泛应用于各种自动化控制系统中,其中调平系统是一个重要的应用领域。本文提出了一种基于倾角传感器的伺服调平系统设计方案,该方案利用了倾角传感器测量机器人的倾斜角度,并通过伺服控制系统对机器人进行自动调平。该方案具有高精度、高可靠性和实现简单等优点,在实际的机器人应用中具有良好的应用前景。关键词:倾角传感器;伺服控制系统;自动调平。1.引言伺服调平系统是一种常用的自动化控制系统,广泛应用于各种领域。机器人系统是其中的一个重要应用领域,机器人在执行任务时,往往需

一种调平控制系统及方法.pdf
本发明公开了一种调平控制系统及方法。调平控制系统包括:平台,连接有3个以上用于支撑平台的可活动支腿;位移传感器,设置于可活动支腿上用于实时反馈可活动支腿的长度;倾角仪,固定于平台用于测量平台相对第一轴的第一倾角和相对于第二轴的第二倾角;控制模块,利用第一倾角和第二倾角计算3个以上可活动支腿需要调整的距离,利用位移传感器调整相应长度,控制模块控制可活动支腿调平,且通过倾角仪监测平台是否调平。通过该调平控制系统能够快速准确地完成平台的调平,利用位移传感器调整相应长度控制其调平,最后通过倾角仪验证平台是否调平,
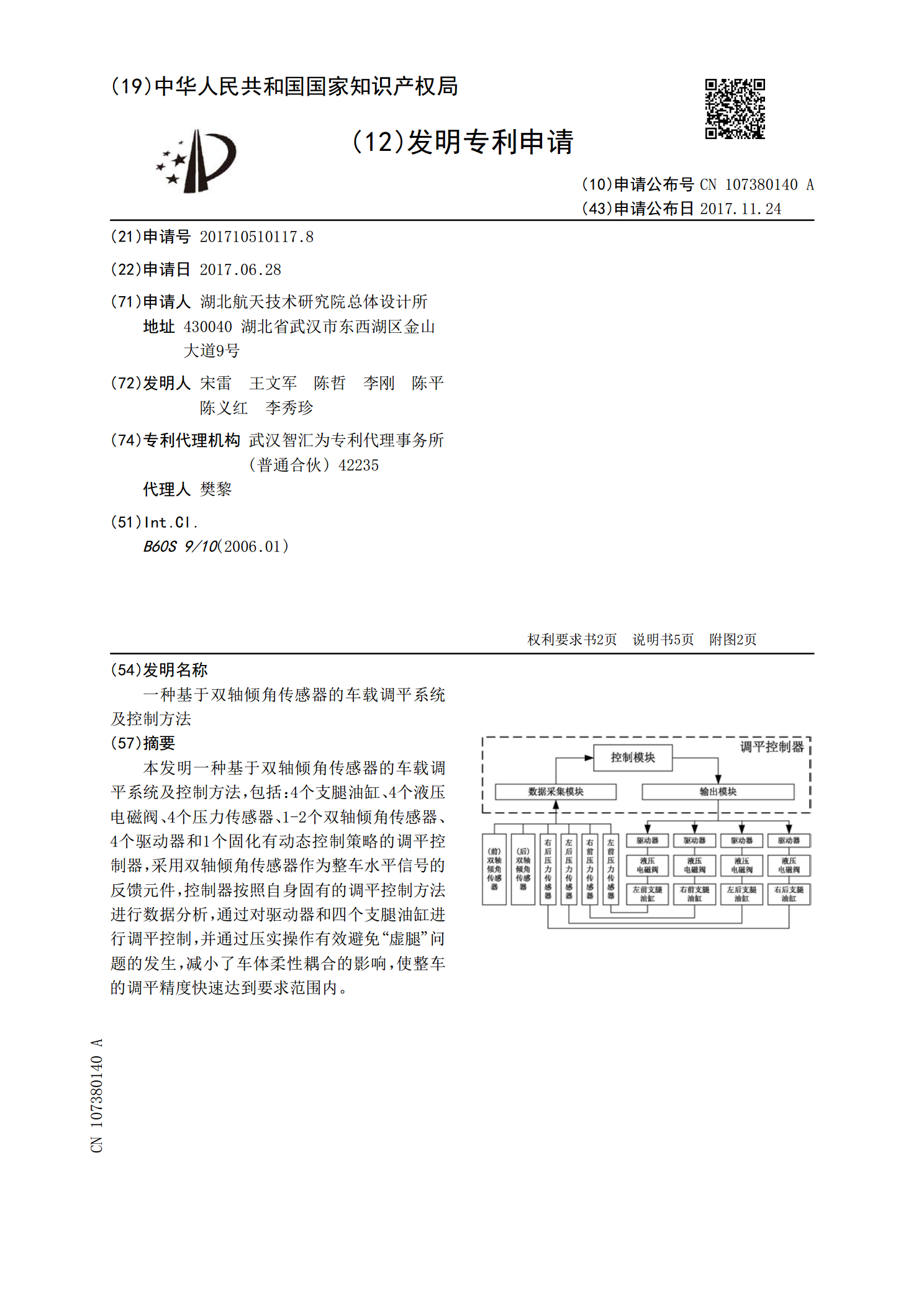
一种基于双轴倾角传感器的车载调平系统及控制方法.pdf
本发明一种基于双轴倾角传感器的车载调平系统及控制方法,包括:4个支腿油缸、4个液压电磁阀、4个压力传感器、1‑2个双轴倾角传感器、4个驱动器和1个固化有动态控制策略的调平控制器,采用双轴倾角传感器作为整车水平信号的反馈元件,控制器按照自身固有的调平控制方法进行数据分析,通过对驱动器和四个支腿油缸进行调平控制,并通过压实操作有效避免“虚腿”问题的发生,减小了车体柔性耦合的影响,使整车的调平精度快速达到要求范围内。
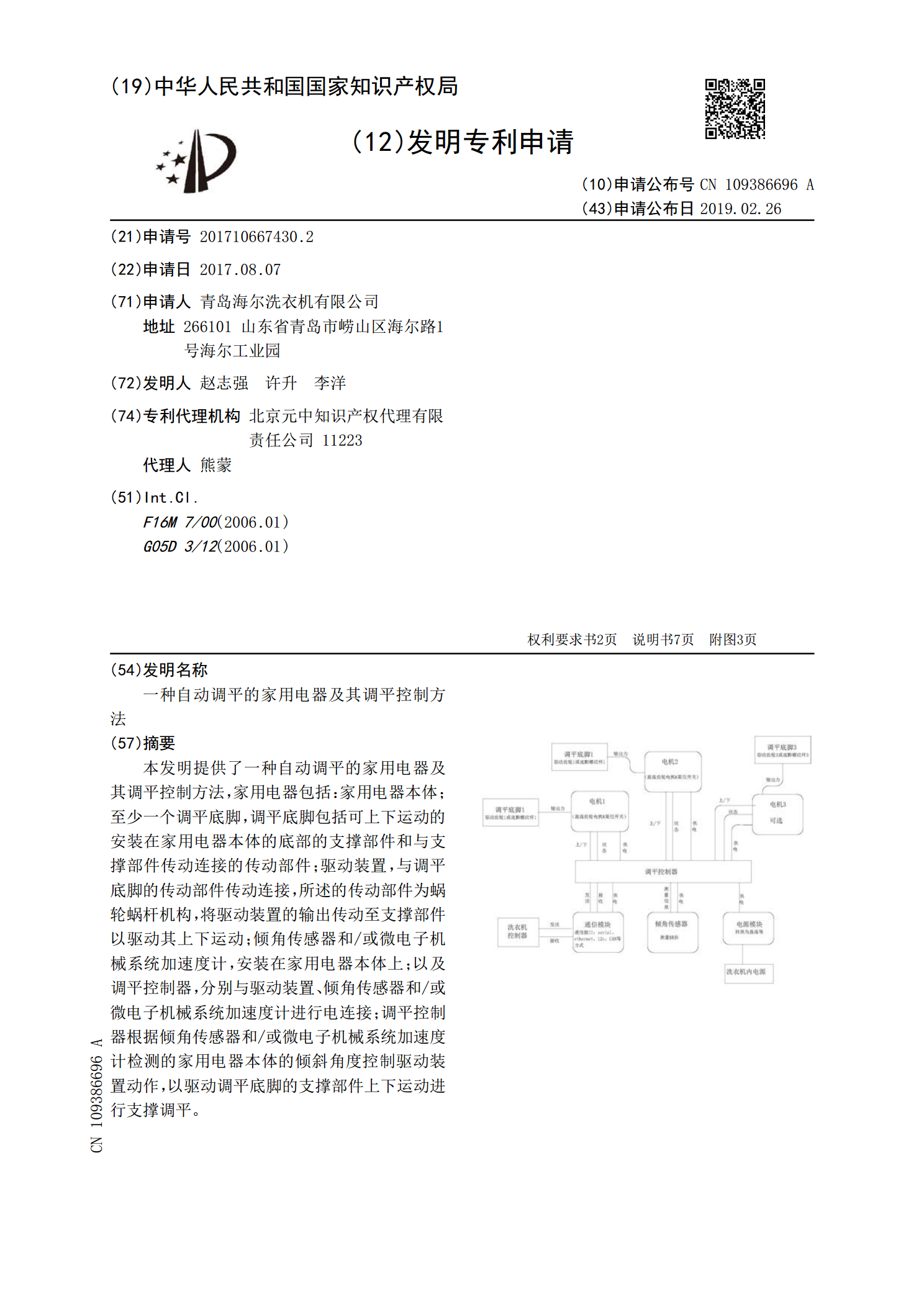
一种自动调平的家用电器及其调平控制方法.pdf
本发明提供了一种自动调平的家用电器及其调平控制方法,家用电器包括:家用电器本体;至少一个调平底脚,调平底脚包括可上下运动的安装在家用电器本体的底部的支撑部件和与支撑部件传动连接的传动部件;驱动装置,与调平底脚的传动部件传动连接,所述的传动部件为蜗轮蜗杆机构,将驱动装置的输出传动至支撑部件以驱动其上下运动;倾角传感器和/或微电子机械系统加速度计,安装在家用电器本体上;以及调平控制器,分别与驱动装置、倾角传感器和/或微电子机械系统加速度计进行电连接;调平控制器根据倾角传感器和/或微电子机械系统加速度计检测的家