
一种基于倾角传感器的伺服调平系统设计.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种基于倾角传感器的伺服调平系统设计.docx
一种基于倾角传感器的伺服调平系统设计摘要:伺服系统广泛应用于各种自动化控制系统中,其中调平系统是一个重要的应用领域。本文提出了一种基于倾角传感器的伺服调平系统设计方案,该方案利用了倾角传感器测量机器人的倾斜角度,并通过伺服控制系统对机器人进行自动调平。该方案具有高精度、高可靠性和实现简单等优点,在实际的机器人应用中具有良好的应用前景。关键词:倾角传感器;伺服控制系统;自动调平。1.引言伺服调平系统是一种常用的自动化控制系统,广泛应用于各种领域。机器人系统是其中的一个重要应用领域,机器人在执行任务时,往往需
一种基于双轴倾角传感器的车载调平系统及控制方法.pdf
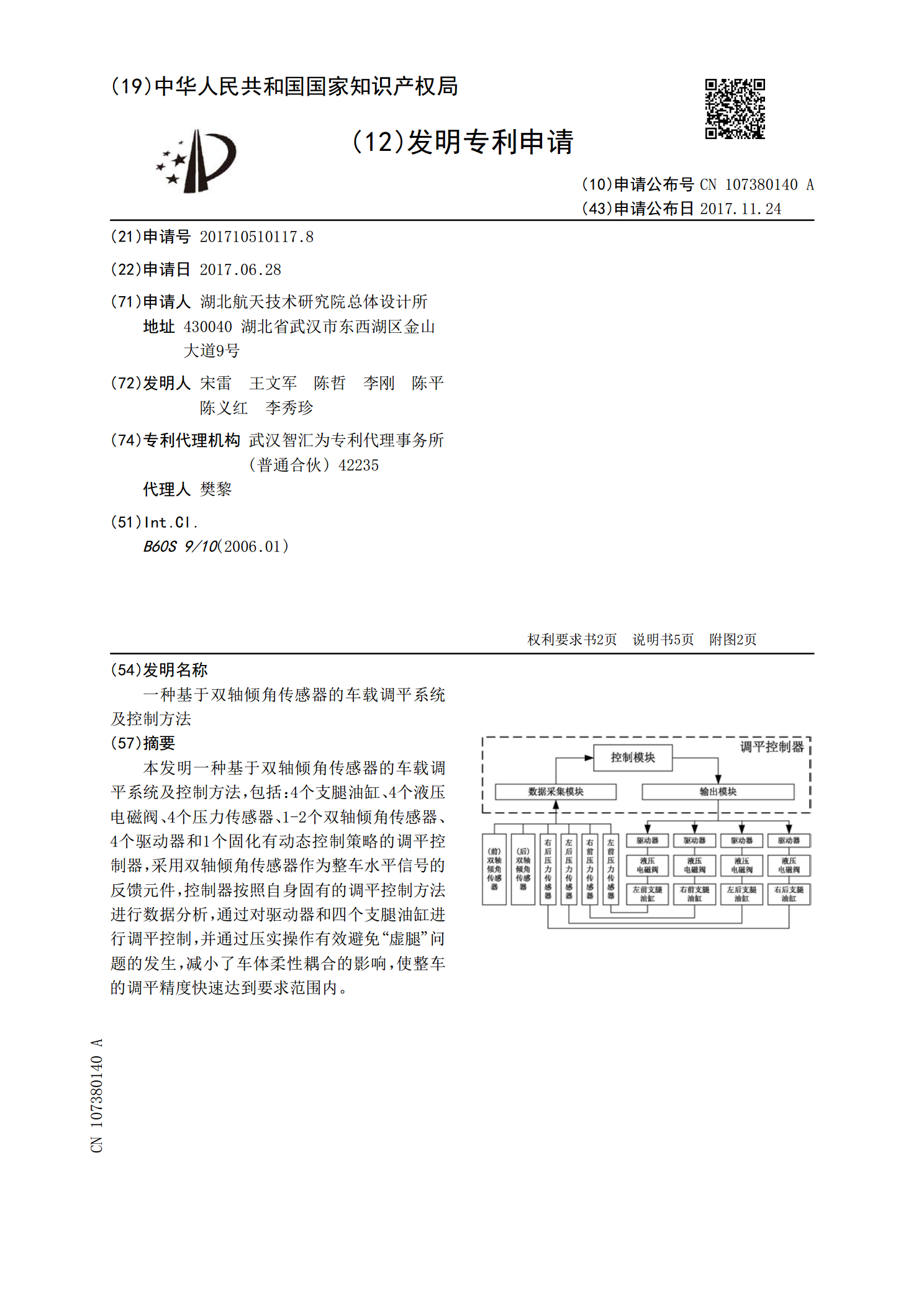
本发明一种基于双轴倾角传感器的车载调平系统及控制方法,包括:4个支腿油缸、4个液压电磁阀、4个压力传感器、1‑2个双轴倾角传感器、4个驱动器和1个固化有动态控制策略的调平控制器,采用双轴倾角传感器作为整车水平信号的反馈元件,控制器按照自身固有的调平控制方法进行数据分析,通过对驱动器和四个支腿油缸进行调平控制,并通过压实操作有效避免“虚腿”问题的发生,减小了车体柔性耦合的影响,使整车的调平精度快速达到要求范围内。

一种基于倾角补偿的调平控制系统及其方法.pdf
本发明公开了一种基于倾角补偿的调平控制系统及其方法,属于汽车底盘调平控制系统技术领域,包括底盘、多根调平支腿、多个倾角传感器、液压阀组和调平控制器,调平支腿均匀对称的分布于底盘平面四角,每根调平支腿上均设置有压力传感器,倾角传感器分别安装于底盘平面的中心以及底盘平面前端位置,液压阀组用于分别控制调平支腿的伸出,调平控制器分别与倾角传感器、压力传感器以及液压阀组相连接。本发明采用四点调平控制模型算法,通过倾角传感器实时采集底盘平面与水平面的倾角差值,并在调平过程中通过辅助控制的方式,实时保持底盘前部平面在调

调平聚焦伺服控制系统的优化设计的开题报告.docx
调平聚焦伺服控制系统的优化设计的开题报告一、选题的背景和意义随着工业自动化的快速发展,伺服控制系统已经成为现代工业生产不可或缺的重要技术装备。调平聚焦伺服控制系统是一种用于控制高精度平面运动的自动化技术,广泛应用于半导体生产、光学装配、精密仪器制造等领域。其主要功能是使工作台实现高精度的位置控制,保证工作效率和产品质量。然而,在实际应用中,现有的调平聚焦伺服控制系统往往存在一定的问题,如系统稳定性不足、控制精度低、系统响应速度慢等。为了提高这些技术装备的性能,对其进行优化设计迫在眉睫。二、文献综述1.束缚

基于ADRC的调距桨伺服控制系统设计.docx
基于ADRC的调距桨伺服控制系统设计标题:基于ADRC的调距桨伺服控制系统设计摘要:调距桨伺服控制系统是一种广泛应用于风力发电等领域的控制系统。本文基于自适应扩展状态观测器(ADRC)理论,设计了一种基于ADRC的调距桨伺服控制系统。该系统能够实现对调距桨角度的稳定控制,并具有良好的抗干扰能力和鲁棒性。关键词:ADRC、调距桨、伺服控制一、引言调距桨伺服控制系统是风力发电系统中的关键控制部分,其主要功能是根据风速的变化调整风轮的桨叶角度,从而最大限度地捕获风能。与传统的PID控制系统相比,基于ADRC的调