
一种基于双轴倾角传感器的车载调平系统及控制方法.pdf

一吃****仕龙


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种基于双轴倾角传感器的车载调平系统及控制方法.pdf
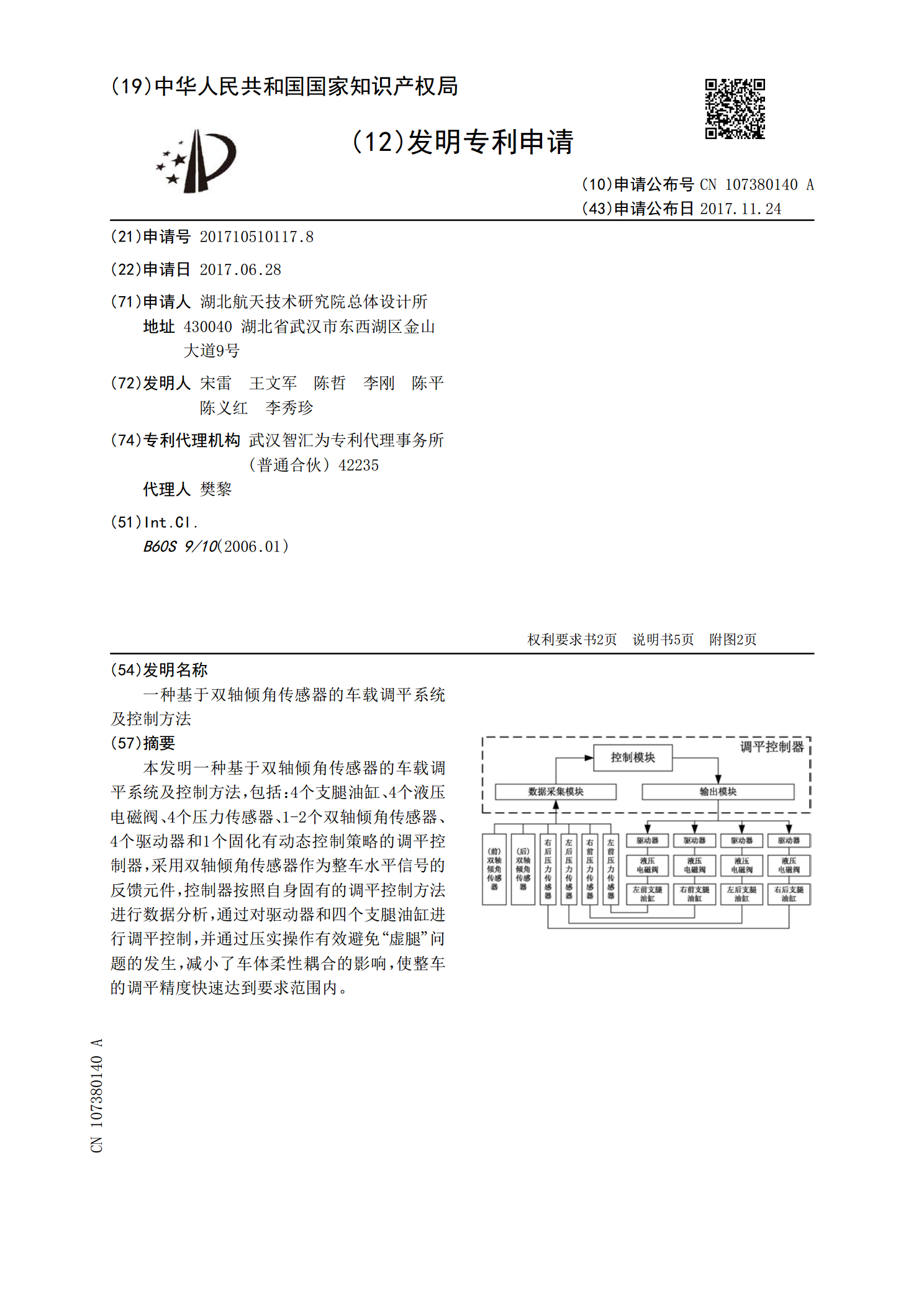
本发明一种基于双轴倾角传感器的车载调平系统及控制方法,包括:4个支腿油缸、4个液压电磁阀、4个压力传感器、1‑2个双轴倾角传感器、4个驱动器和1个固化有动态控制策略的调平控制器,采用双轴倾角传感器作为整车水平信号的反馈元件,控制器按照自身固有的调平控制方法进行数据分析,通过对驱动器和四个支腿油缸进行调平控制,并通过压实操作有效避免“虚腿”问题的发生,减小了车体柔性耦合的影响,使整车的调平精度快速达到要求范围内。

一种基于倾角传感器的伺服调平系统设计.docx
一种基于倾角传感器的伺服调平系统设计摘要:伺服系统广泛应用于各种自动化控制系统中,其中调平系统是一个重要的应用领域。本文提出了一种基于倾角传感器的伺服调平系统设计方案,该方案利用了倾角传感器测量机器人的倾斜角度,并通过伺服控制系统对机器人进行自动调平。该方案具有高精度、高可靠性和实现简单等优点,在实际的机器人应用中具有良好的应用前景。关键词:倾角传感器;伺服控制系统;自动调平。1.引言伺服调平系统是一种常用的自动化控制系统,广泛应用于各种领域。机器人系统是其中的一个重要应用领域,机器人在执行任务时,往往需

一种基于倾角补偿的调平控制系统及其方法.pdf
本发明公开了一种基于倾角补偿的调平控制系统及其方法,属于汽车底盘调平控制系统技术领域,包括底盘、多根调平支腿、多个倾角传感器、液压阀组和调平控制器,调平支腿均匀对称的分布于底盘平面四角,每根调平支腿上均设置有压力传感器,倾角传感器分别安装于底盘平面的中心以及底盘平面前端位置,液压阀组用于分别控制调平支腿的伸出,调平控制器分别与倾角传感器、压力传感器以及液压阀组相连接。本发明采用四点调平控制模型算法,通过倾角传感器实时采集底盘平面与水平面的倾角差值,并在调平过程中通过辅助控制的方式,实时保持底盘前部平面在调

一种基于电导探针的双轴倾角传感器.pdf
本发明提供一种基于电导探针的双轴倾角传感器,包括压盖、探针、底座、溶液、电导液舱和密封座;所述底座的上部的第三级凹槽内加工有盲孔,所述探针底部安装在盲孔内;所述电导液舱下部通过螺纹旋入底座的第二级凹槽内;所述密封座下部通过螺纹与电导液舱上部凹槽相连接;所述密封座顶部的第三级凹槽内加工有与盲孔对应的阶梯通孔;所述压盖底部加工有与阶梯通孔对应的凸台,凸台的中间均设有通孔;压盖放置于密封座顶部的第三级凹槽内;探针的顶部依次穿过密封座及凸台的通孔;所述压盖上端中部加工有通孔,开槽螺栓穿过压盖上的通孔后通过螺纹旋入

基于双水平传感器的平台调平控制系统和调控方法.pdf
本发明公开了一种基于双水平传感器的平台调平控制系统和控制方法,包括平台本体以及可伸缩的左前支腿、右前支腿、左后支腿和右后支腿;平台本体靠近前端位置处设有第一水平传感器,靠近后端位置处设有第二水平传感器,第一水平传感器和第二水平传感器通过线缆与控制器连接并受其调控;左前支腿、右前支腿、左后支腿和右后支腿均通过线缆与控制器连接,且通过控制器调控各个支腿伸缩。本发明的平台调平控制系统和控制方法,实现了对大型工作平台的自动快速精准调平,并可以有效对大型平台的形变进行自动感应补偿,自动调平后无需人员手动补偿,解决了