
一种调平控制系统及方法.pdf

慧颖****23


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种调平控制系统及方法.pdf
本发明公开了一种调平控制系统及方法。调平控制系统包括:平台,连接有3个以上用于支撑平台的可活动支腿;位移传感器,设置于可活动支腿上用于实时反馈可活动支腿的长度;倾角仪,固定于平台用于测量平台相对第一轴的第一倾角和相对于第二轴的第二倾角;控制模块,利用第一倾角和第二倾角计算3个以上可活动支腿需要调整的距离,利用位移传感器调整相应长度,控制模块控制可活动支腿调平,且通过倾角仪监测平台是否调平。通过该调平控制系统能够快速准确地完成平台的调平,利用位移传感器调整相应长度控制其调平,最后通过倾角仪验证平台是否调平,

一种火箭发射平台的调平控制系统及方法.pdf
本发明公开了一种火箭发射平台的调平控制系统及方法。火箭发射平台的调平控制系统包括:第一检测器,设置在火箭发射平台的可活动支腿上,用于反馈可活动支腿的长度;第二检测器,用于检测火箭发射平台相对于第一轴的第一倾角和相对于第二轴的第二倾角;控制模块,利用第一倾角和第二倾角计算可活动支腿需要调整的距离,并控制可活动支腿调整至平台满足精度要求。通过该火箭发射平台的调平控制系统能够快速准确地完成发射平台的调平,利用第二检测器判断两个轴向的倾角,控制模块计算各个可活动支腿需要调整的距离,通过第一检测器调整相应距离,控制

一种基于倾角补偿的调平控制系统及其方法.pdf
本发明公开了一种基于倾角补偿的调平控制系统及其方法,属于汽车底盘调平控制系统技术领域,包括底盘、多根调平支腿、多个倾角传感器、液压阀组和调平控制器,调平支腿均匀对称的分布于底盘平面四角,每根调平支腿上均设置有压力传感器,倾角传感器分别安装于底盘平面的中心以及底盘平面前端位置,液压阀组用于分别控制调平支腿的伸出,调平控制器分别与倾角传感器、压力传感器以及液压阀组相连接。本发明采用四点调平控制模型算法,通过倾角传感器实时采集底盘平面与水平面的倾角差值,并在调平过程中通过辅助控制的方式,实时保持底盘前部平面在调

一种支撑装置的调平控制系统、方法及消防车.pdf
本发明提出了一种支撑装置的调平控制系统、方法及消防车,支撑装置包括固定架、支撑臂及支撑腿,该系统还包括:用于检测固定架倾角的倾角检测装置、用于检测各个支撑腿的下撑状态的支撑检测装置、用于控制各个支撑腿动作的支腿控制阀及控制器,倾角检测装置、支撑检测装置的信号输出端与控制器的信号输入端连接,控制器的信号输出端与支腿控制阀连接,控制器用于根据支撑检测装置的信号确定各个支撑腿是否下撑到位,用于根据倾角检测装置的信号判断四个支撑腿中最高的支撑腿,并用于在支撑装置调平是通过支腿控制阀每次控制除最高的支撑腿外的其中两
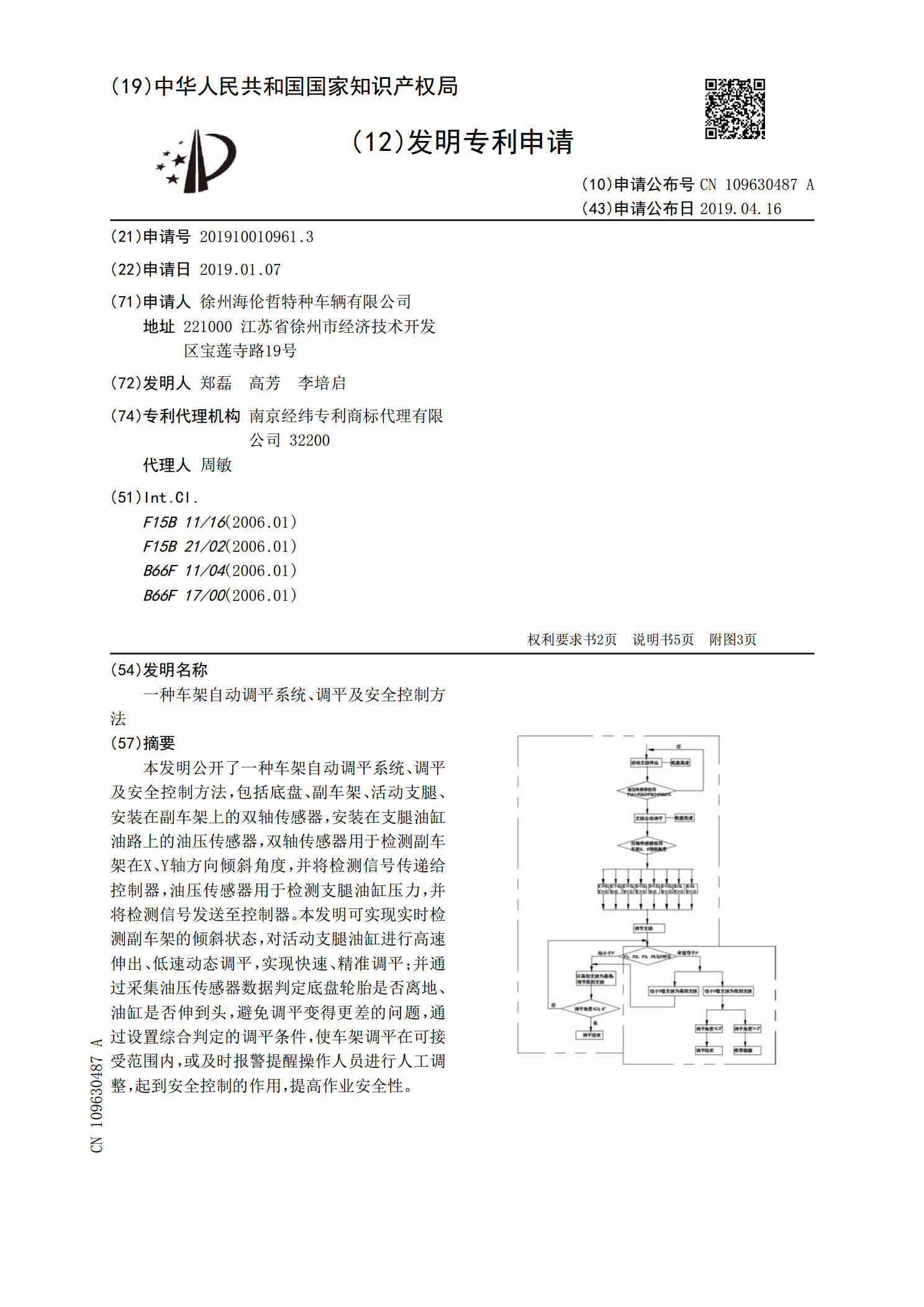
一种车架自动调平系统、调平及安全控制方法.pdf
本发明公开了一种车架自动调平系统、调平及安全控制方法,包括底盘、副车架、活动支腿、安装在副车架上的双轴传感器,安装在支腿油缸油路上的油压传感器,双轴传感器用于检测副车架在X、Y轴方向倾斜角度,并将检测信号传递给控制器,油压传感器用于检测支腿油缸压力,并将检测信号发送至控制器。本发明可实现实时检测副车架的倾斜状态,对活动支腿油缸进行高速伸出、低速动态调平,实现快速、精准调平;并通过采集油压传感器数据判定底盘轮胎是否离地、油缸是否伸到头,避免调平变得更差的问题,通过设置综合判定的调平条件,使车架调平在可接受范