
高空作业平台底盘支腿差速控制系统、方法及设备.pdf

猫巷****晓容


1/10
2/10

3/10

4/10
5/10
6/10

7/10
8/10
9/10

10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
高空作业平台底盘支腿差速控制系统、方法及设备.pdf
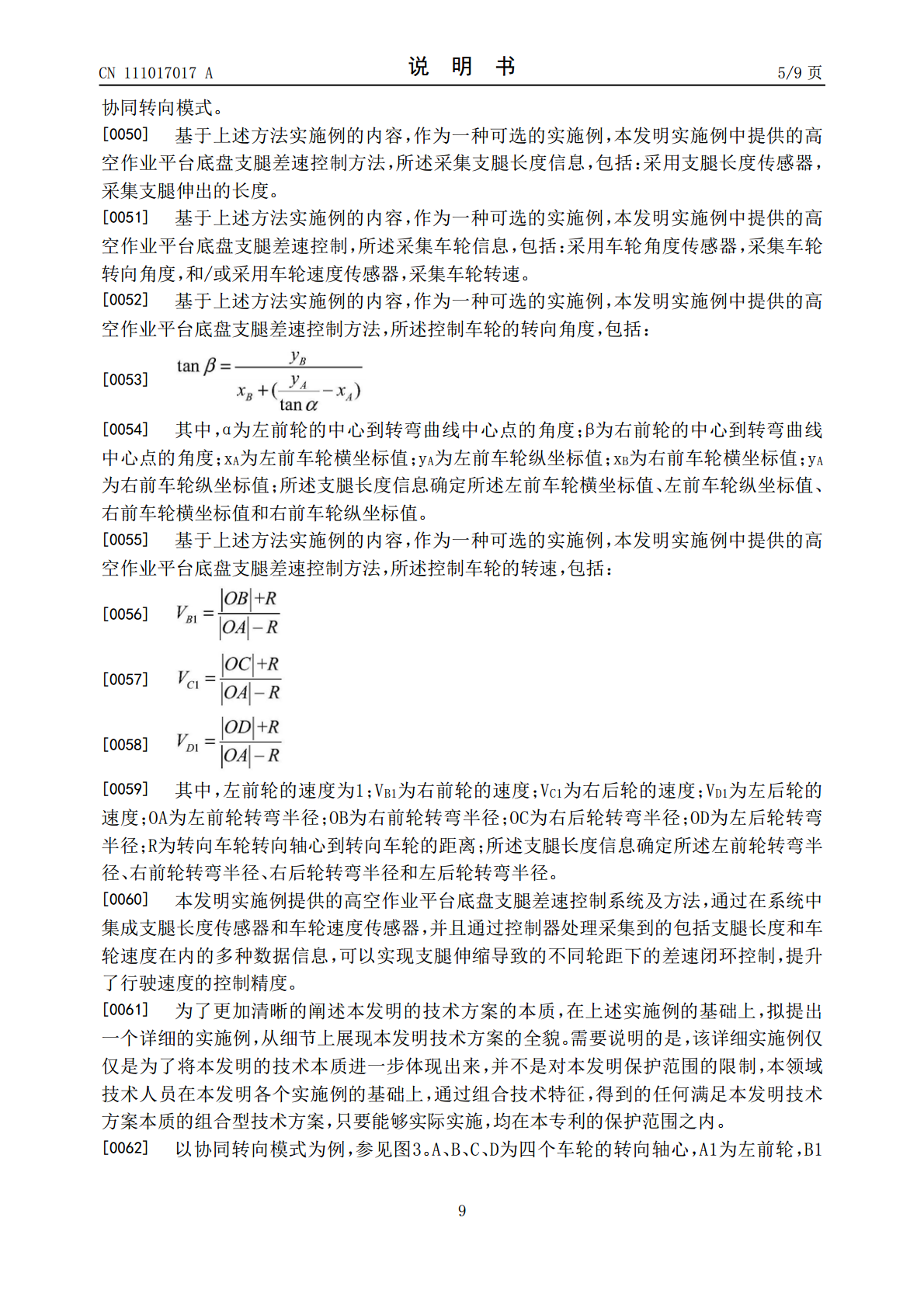
本发明实施例提供了一种高空作业平台底盘支腿差速控制系统、方法及设备。其中,所述系统包括:支腿长度传感器,用于获取支腿伸出的长度;车轮角度传感器,用于获取车轮转向角度;车轮速度传感器,用于获取车轮转速;信息输入模块,用于输入转向模式;控制器,用于控制转弯差速;执行机构,与控制器连接,用于执行控制器的控制指令。本发明实施例提供的高空作业平台底盘支腿差速控制系统、方法及设备,可以实现支腿伸缩导致的不同轮距下的差速闭环控制,提升了行驶速度的控制精度。
支腿液压控制系统及其控制方法以及高空作业平台.pdf
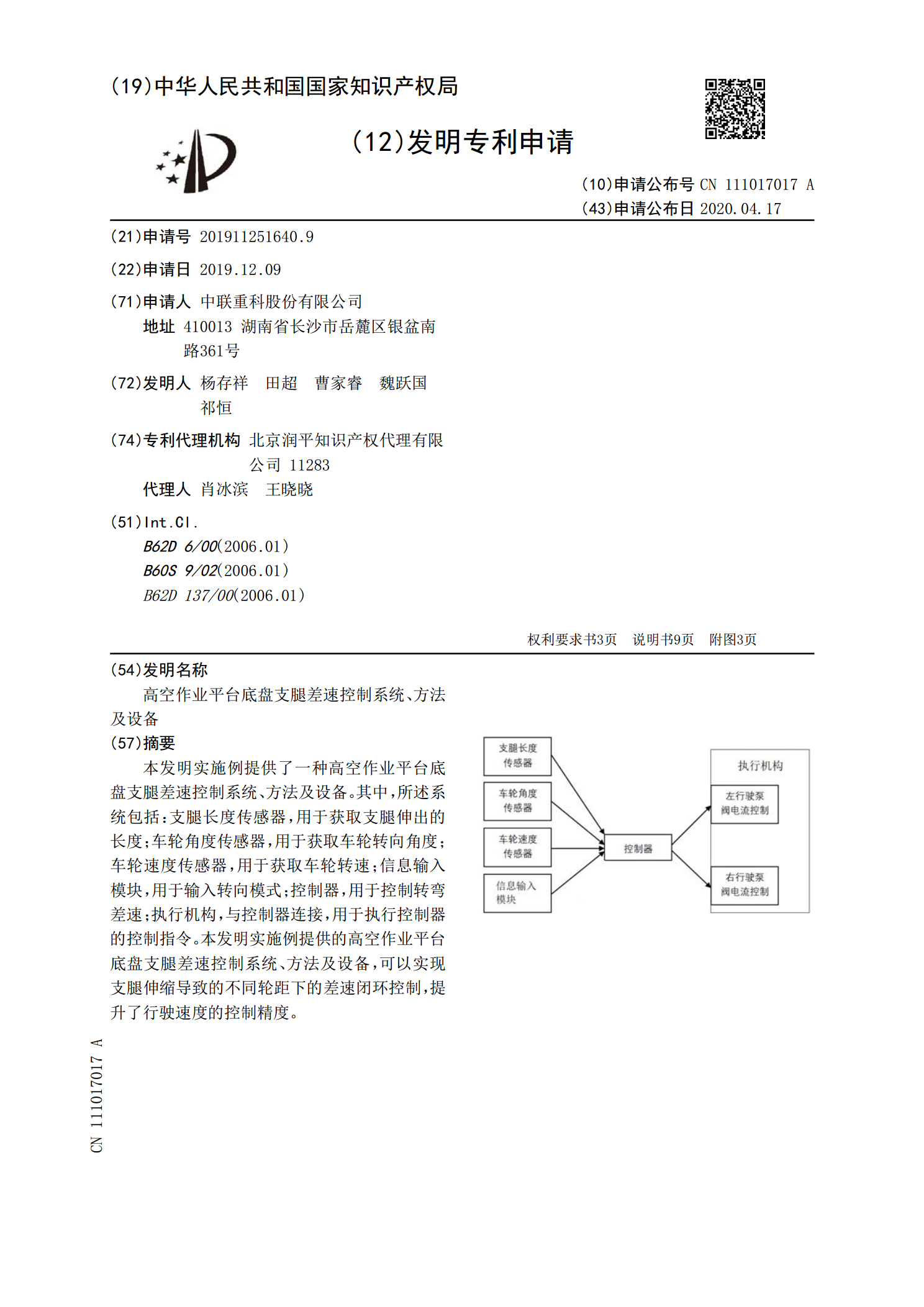
本发明公开了一种支腿液压控制系统及其控制方法以及高空作业平台。支腿液压控制系统包括:第一电磁换向阀,第一电磁换向阀的第一油口用于与液压泵连通,第一电磁换向阀的第二油口用于与油箱连通;第二电磁换向阀,第二电磁换向阀的第一油口与第一电磁换向阀的第三油口连通;油缸组件,油缸组件包括多个油缸单元,每个油缸单元均包括油缸以及第三电磁换向阀,每个第三电磁换向阀的第一油口均与第二电磁换向阀的第二油口连通,每个油缸的有杆腔均与第一电磁换向阀的第四油口连通,且在每个油缸单元中,第三电磁换向阀的第二油口与油缸的无杆腔连通。上
一种高空作业平台支腿移动方法及高空作业平台.pdf
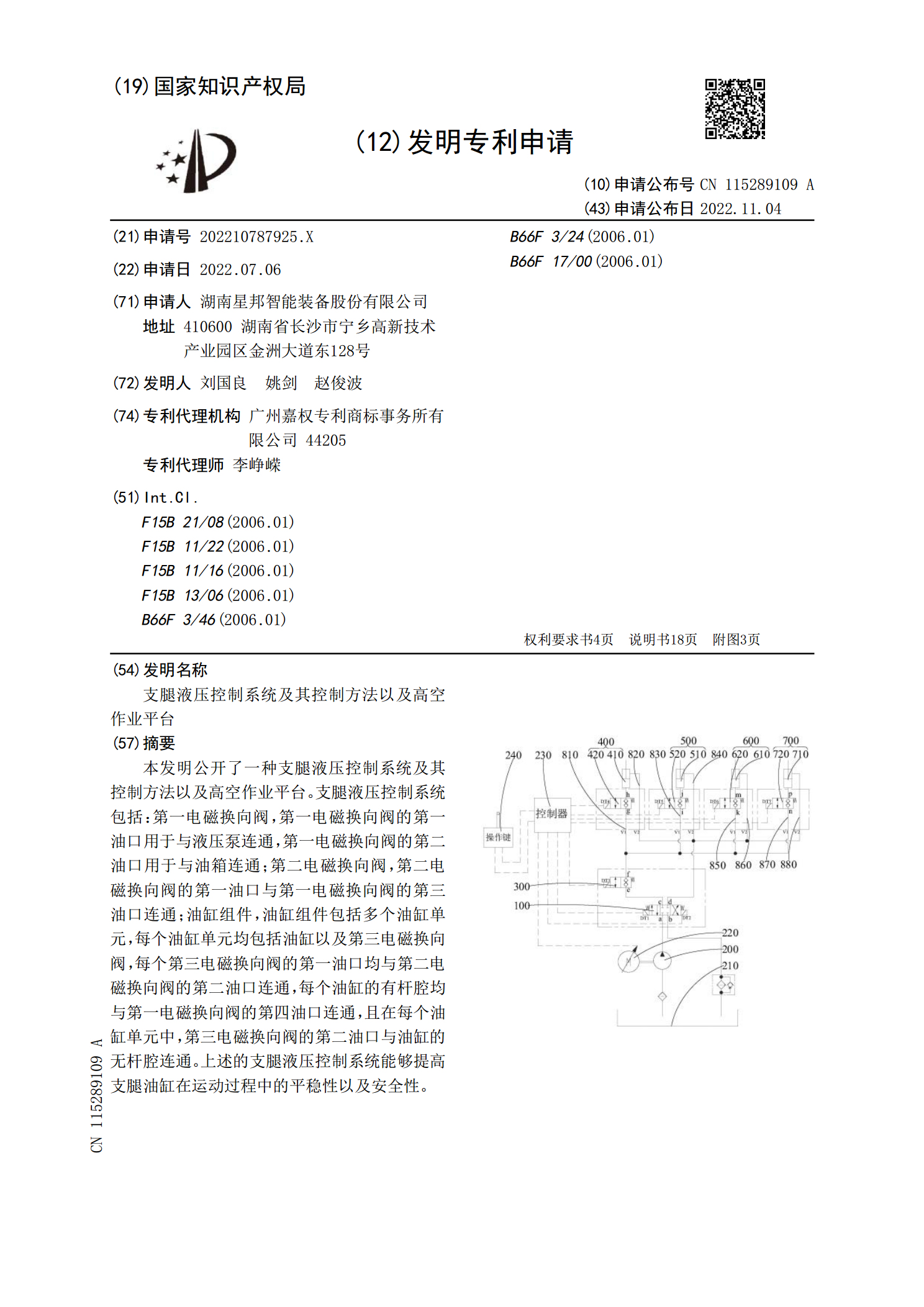
本发明属于高空作业设备技术领域,公开了一种高空作业平台支腿移动方法及高空作业平台,高空作业平台支腿移动方法包括:获取高空作业平台于移动过程中的行驶速度矢量V<base:Sub>1</base:Sub>;驱动支腿移动,获取支腿的移动速度矢量V<base:Sub>2</base:Sub>;根据行驶速度矢量V<base:Sub>1</base:Sub>和移动速度矢量V<base:Sub>2</base:Sub>生成合速度矢量V;调整支腿端部的轮胎的行走方向,使轮胎的行走方向与合速度矢量V的方向保持一致。本发明提
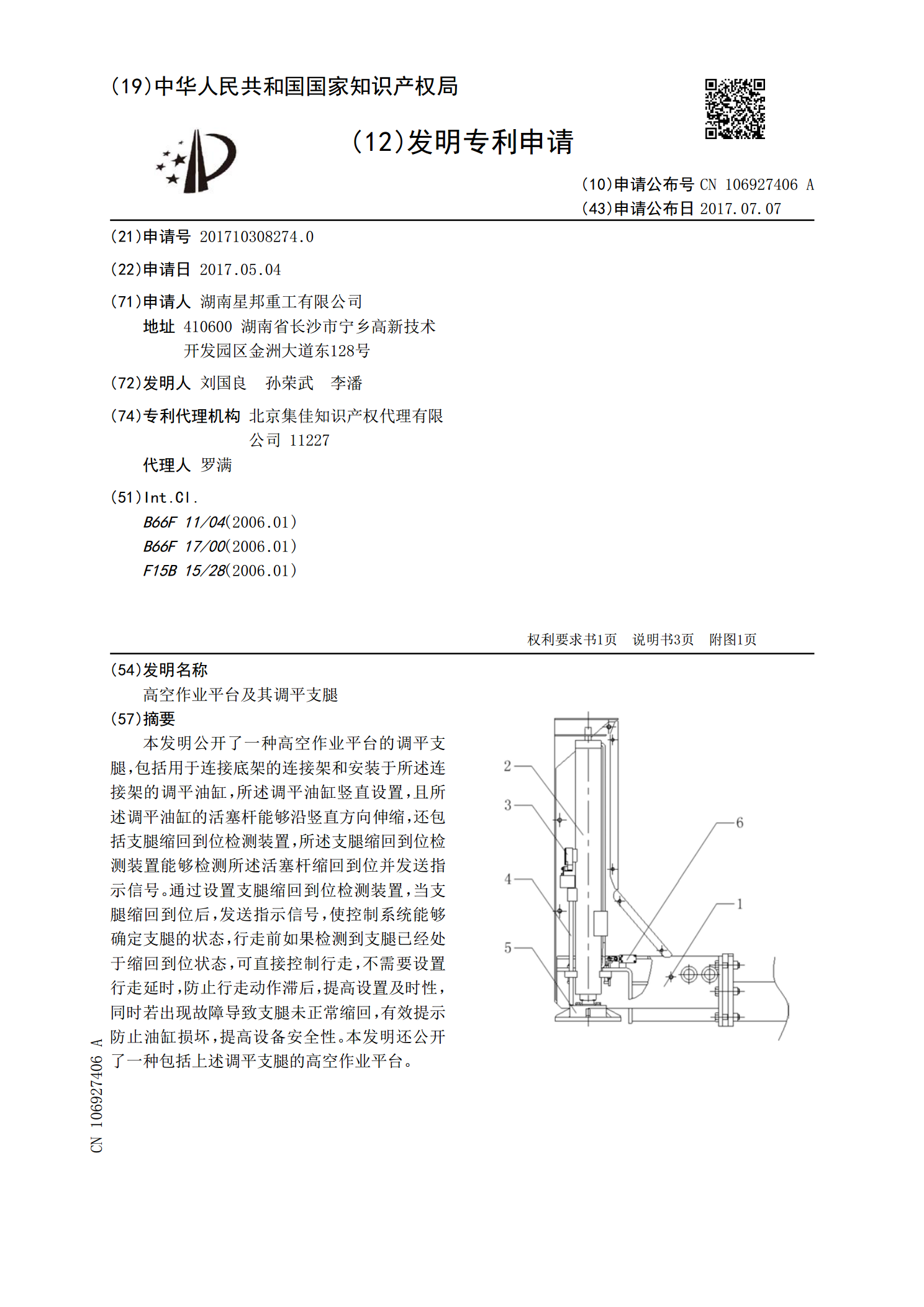
高空作业平台及其调平支腿.pdf
本发明公开了一种高空作业平台的调平支腿,包括用于连接底架的连接架和安装于所述连接架的调平油缸,所述调平油缸竖直设置,且所述调平油缸的活塞杆能够沿竖直方向伸缩,还包括支腿缩回到位检测装置,所述支腿缩回到位检测装置能够检测所述活塞杆缩回到位并发送指示信号。通过设置支腿缩回到位检测装置,当支腿缩回到位后,发送指示信号,使控制系统能够确定支腿的状态,行走前如果检测到支腿已经处于缩回到位状态,可直接控制行走,不需要设置行走延时,防止行走动作滞后,提高设置及时性,同时若出现故障导致支腿未正常缩回,有效提示防止油缸损坏
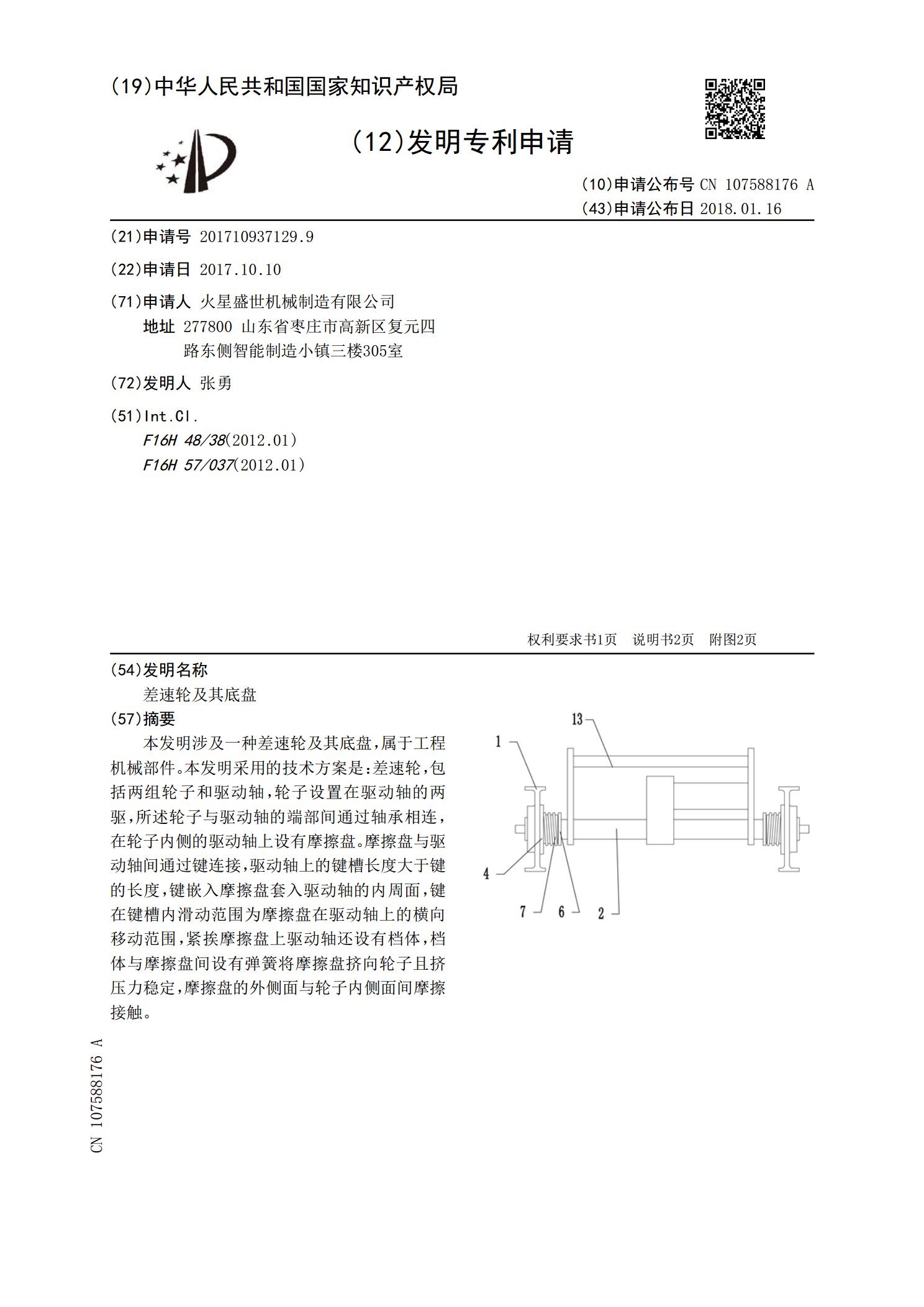
差速轮及其底盘.pdf
本发明涉及一种差速轮及其底盘,属于工程机械部件。本发明采用的技术方案是:差速轮,包括两组轮子和驱动轴,轮子设置在驱动轴的两驱,所述轮子与驱动轴的端部间通过轴承相连,在轮子内侧的驱动轴上设有摩擦盘。摩擦盘与驱动轴间通过键连接,驱动轴上的键槽长度大于键的长度,键嵌入摩擦盘套入驱动轴的内周面,键在键槽内滑动范围为摩擦盘在驱动轴上的横向移动范围,紧挨摩擦盘上驱动轴还设有档体,档体与摩擦盘间设有弹簧将摩擦盘挤向轮子且挤压力稳定,摩擦盘的外侧面与轮子内侧面间摩擦接触。