
可变形式墙面清洁机器人及其清洁方法及其越障方法.pdf

文库****坚白

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
可变形式墙面清洁机器人及其清洁方法及其越障方法.pdf
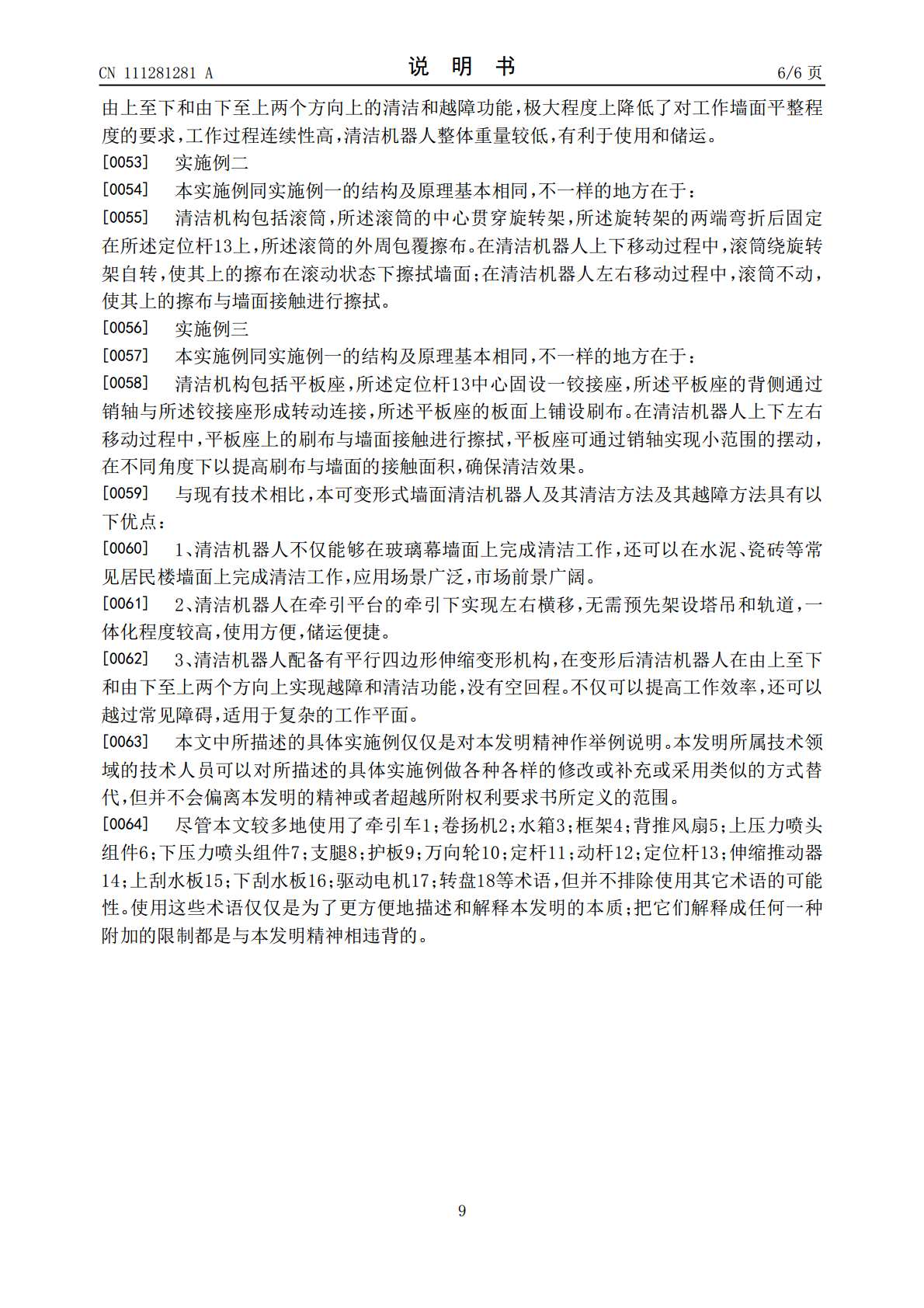
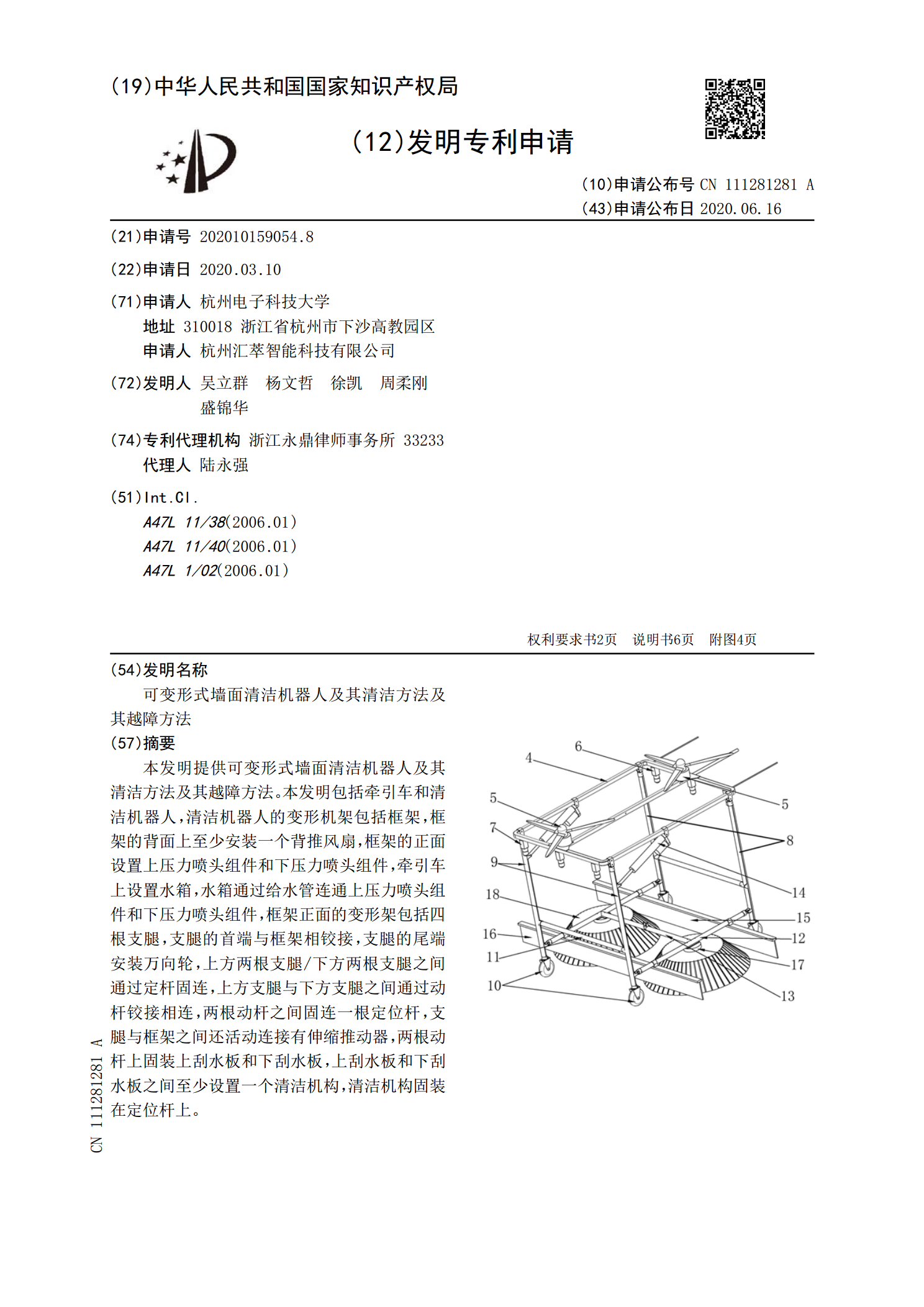
本发明提供可变形式墙面清洁机器人及其清洁方法及其越障方法。本发明包括牵引车和清洁机器人,清洁机器人的变形机架包括框架,框架的背面上至少安装一个背推风扇,框架的正面设置上压力喷头组件和下压力喷头组件,牵引车上设置水箱,水箱通过给水管连通上压力喷头组件和下压力喷头组件,框架正面的变形架包括四根支腿,支腿的首端与框架相铰接,支腿的尾端安装万向轮,上方两根支腿/下方两根支腿之间通过定杆固连,上方支腿与下方支腿之间通过动杆铰接相连,两根动杆之间固连一根定位杆,支腿与框架之间还活动连接有伸缩推动器,两根动杆上固装上刮
越障光伏清洁机器人及其越障方法.pdf
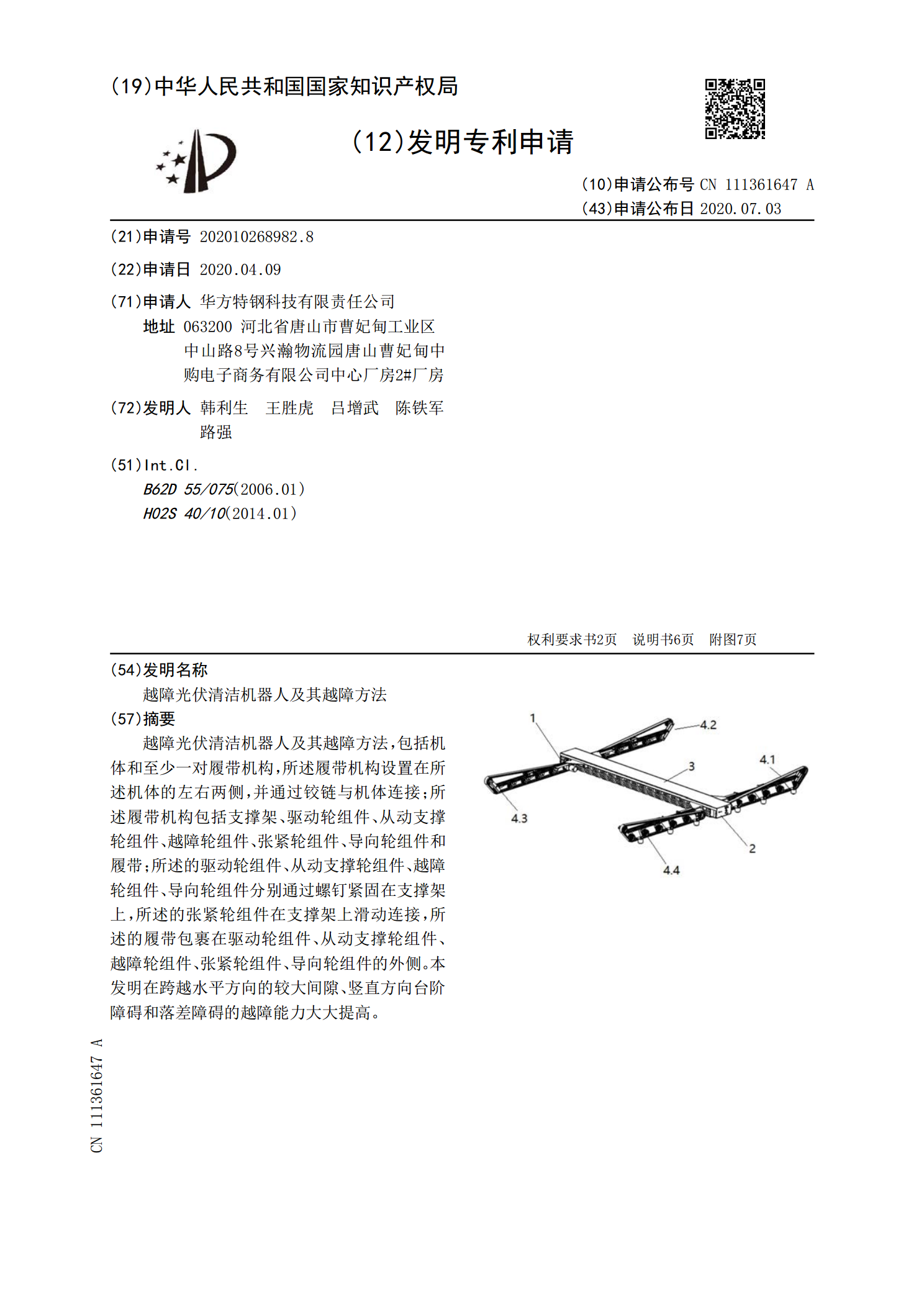
越障光伏清洁机器人及其越障方法,包括机体和至少一对履带机构,所述履带机构设置在所述机体的左右两侧,并通过铰链与机体连接;所述履带机构包括支撑架、驱动轮组件、从动支撑轮组件、越障轮组件、张紧轮组件、导向轮组件和履带;所述的驱动轮组件、从动支撑轮组件、越障轮组件、导向轮组件分别通过螺钉紧固在支撑架上,所述的张紧轮组件在支撑架上滑动连接,所述的履带包裹在驱动轮组件、从动支撑轮组件、越障轮组件、张紧轮组件、导向轮组件的外侧。本发明在跨越水平方向的较大间隙、竖直方向台阶障碍和落差障碍的越障能力大大提高。
清洁机器人及其清洁方法.pdf
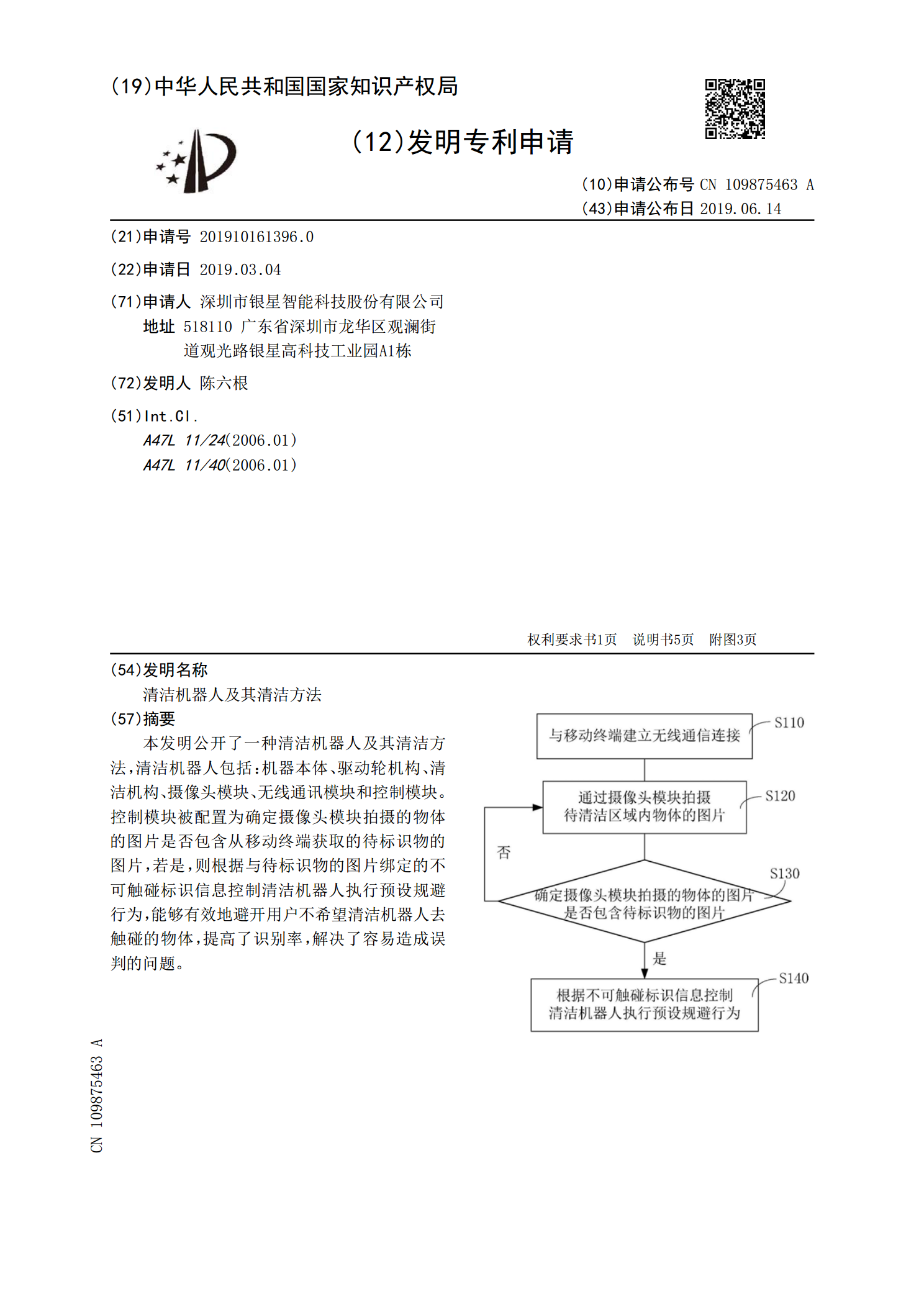
本发明公开了一种清洁机器人及其清洁方法,清洁机器人包括:机器本体、驱动轮机构、清洁机构、摄像头模块、无线通讯模块和控制模块。控制模块被配置为确定摄像头模块拍摄的物体的图片是否包含从移动终端获取的待标识物的图片,若是,则根据与待标识物的图片绑定的不可触碰标识信息控制清洁机器人执行预设规避行为,能够有效地避开用户不希望清洁机器人去触碰的物体,提高了识别率,解决了容易造成误判的问题。
一种环形式运输的法兰清洁机器人及其清洁方法.pdf
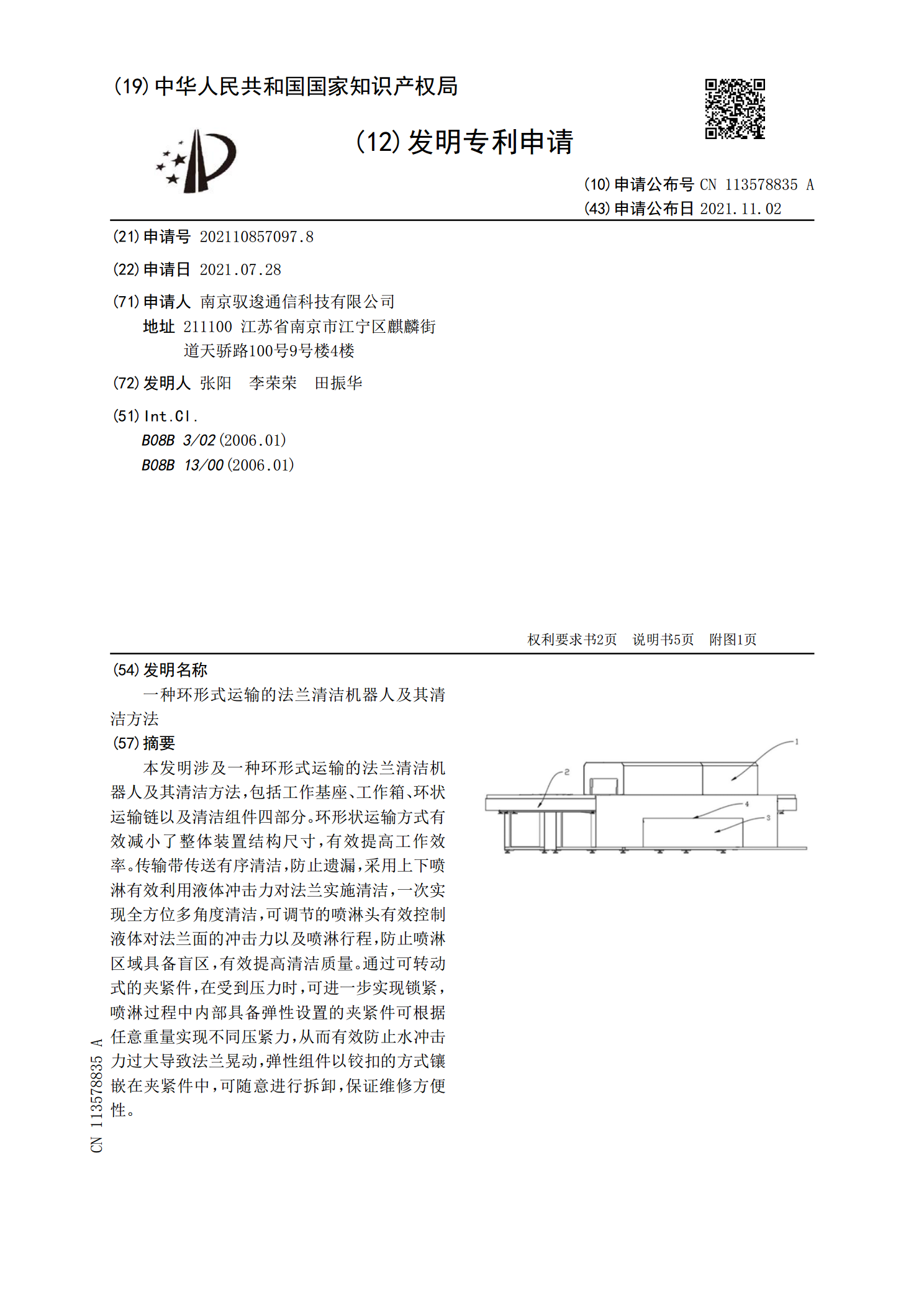
本发明涉及一种环形式运输的法兰清洁机器人及其清洁方法,包括工作基座、工作箱、环状运输链以及清洁组件四部分。环形状运输方式有效减小了整体装置结构尺寸,有效提高工作效率。传输带传送有序清洁,防止遗漏,采用上下喷淋有效利用液体冲击力对法兰实施清洁,一次实现全方位多角度清洁,可调节的喷淋头有效控制液体对法兰面的冲击力以及喷淋行程,防止喷淋区域具备盲区,有效提高清洁质量。通过可转动式的夹紧件,在受到压力时,可进一步实现锁紧,喷淋过程中内部具备弹性设置的夹紧件可根据任意重量实现不同压紧力,从而有效防止水冲击力过大导致

清洁机器人及其控制方法.pdf
本发明公开了一种清洁机器人及其控制方法,涉及自动控制技术领域,包括设有两个前车轮的车体,车体内装有车架,在车架上设有扫把和垃圾箱,水池、与舵机的输出轴连接的湿拖把、干燥拖把,舵机安装于固定板上,舵机和丝杆的电机与控制器连接,控制器还与方位检测器、速度检测器、超声波测距模块、程序下载及调试器、计数器和驱动电机连接;控制方法:A.清洁机器人移动时中用扫把清扫垃圾,湿拖把清洁地板,干燥拖拖干地板;B.一定时间后将湿拖把送入水池中清洗,清洗后返回原来位置继续拖地;C.检测到电量小于预设值时,清洁机器人自动回到充电