
越障光伏清洁机器人及其越障方法.pdf

是秋****写意


1/10
2/10
3/10
4/10
5/10
6/10

7/10

8/10

9/10

10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
越障光伏清洁机器人及其越障方法.pdf
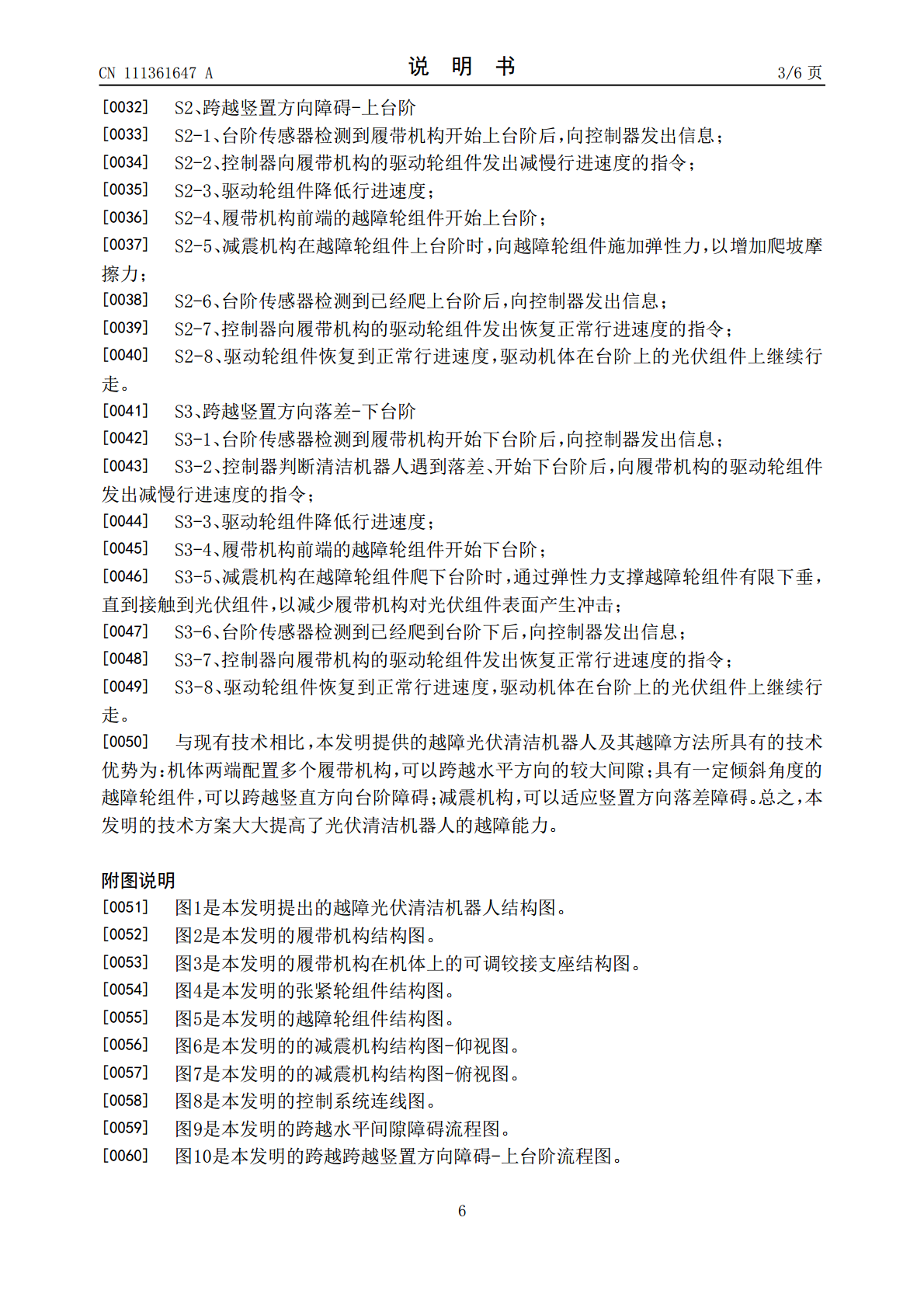
越障光伏清洁机器人及其越障方法,包括机体和至少一对履带机构,所述履带机构设置在所述机体的左右两侧,并通过铰链与机体连接;所述履带机构包括支撑架、驱动轮组件、从动支撑轮组件、越障轮组件、张紧轮组件、导向轮组件和履带;所述的驱动轮组件、从动支撑轮组件、越障轮组件、导向轮组件分别通过螺钉紧固在支撑架上,所述的张紧轮组件在支撑架上滑动连接,所述的履带包裹在驱动轮组件、从动支撑轮组件、越障轮组件、张紧轮组件、导向轮组件的外侧。本发明在跨越水平方向的较大间隙、竖直方向台阶障碍和落差障碍的越障能力大大提高。
越障机器人及其越障方法.pdf
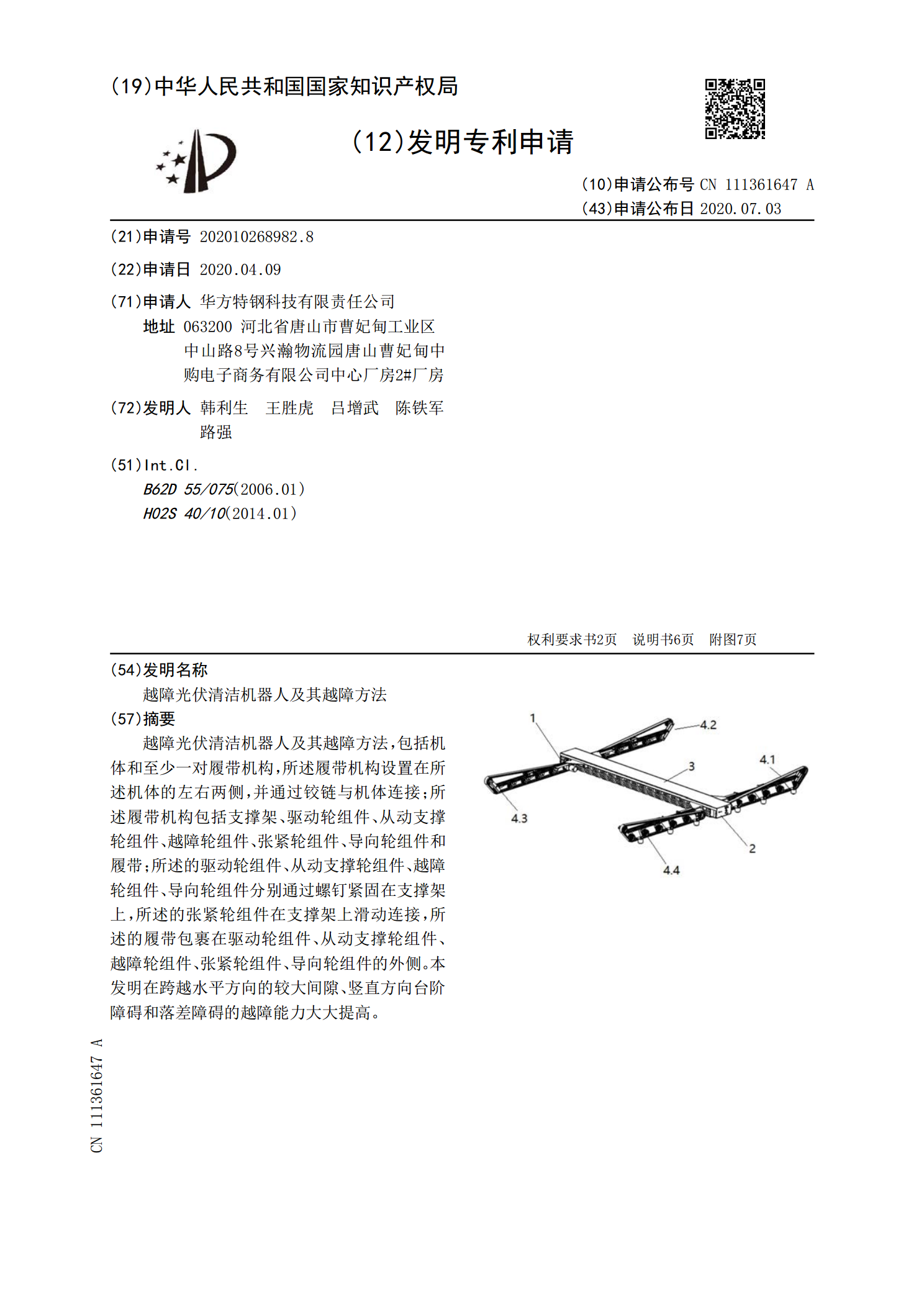
本发明涉及一种越障机器人及其越障方法,包括结构模块,其包括机身以及依次沿所述机身长度方向设置的三组行走机构,三组行走机构均包括两个对称设置在机身两侧的越障装置,越障装置包括设置在机身上的第一驱动装置、与第一驱动装置连接的腿部支架、设置在腿部支架另一端的驱动轮以及与驱动轮的轮轴联接且为其提供动力的第二驱动装置;感应模块,其设置在所述机身上;控制系统,其与感应模块以及三组行走机构的第一驱动装置以及第二驱动装置电气连接,用于接收所述感应模块采集的信息,并根据该采集的信息控制三组行走机构的工作情况。本发明的机器人
可越障查验机器人及其越障方法.pdf
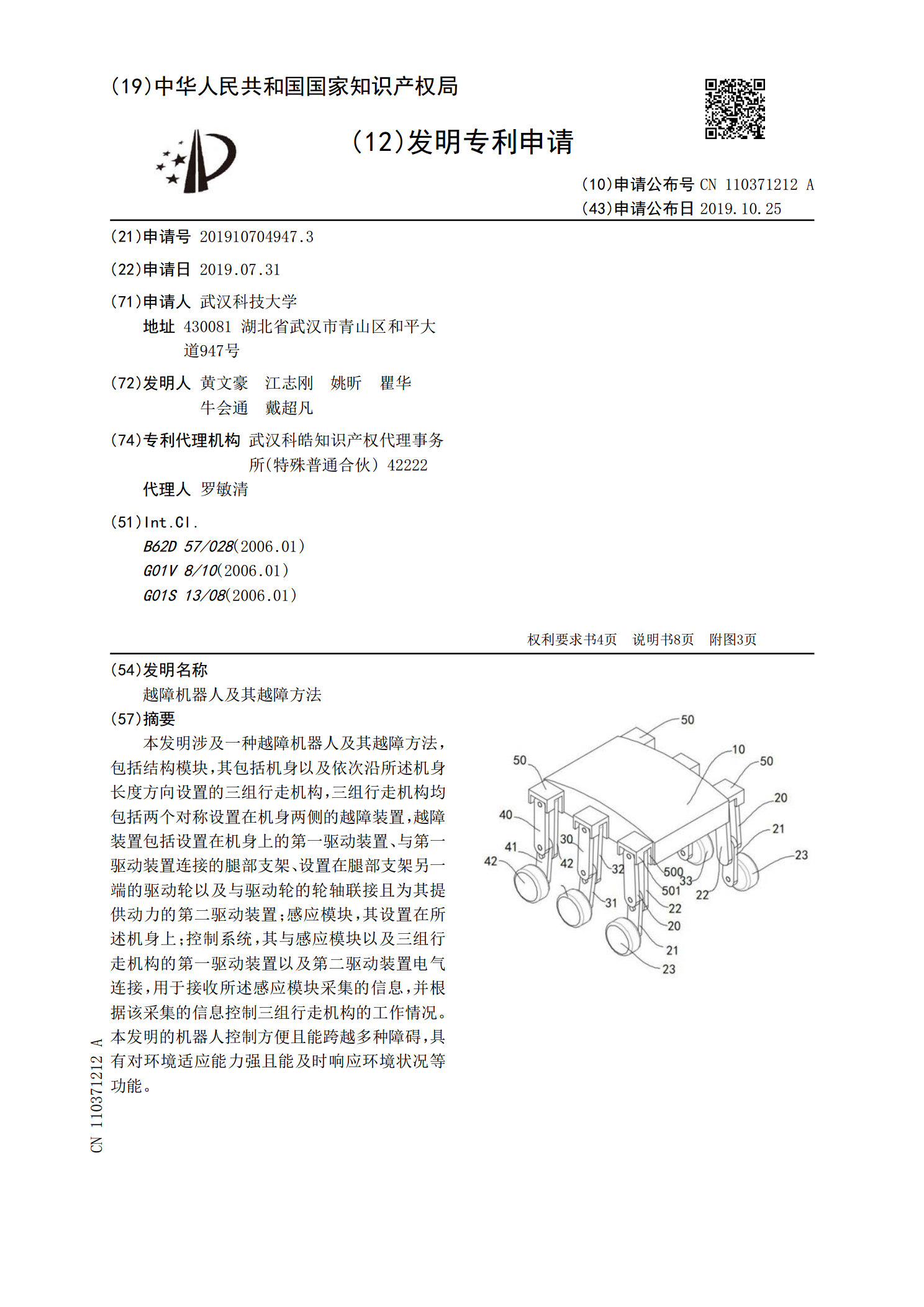
本发明公开了一种可越障查验机器人,该机器人至少由机身、两组驱动装置、两组与驱动装置相连的机臂、机尾支撑杆组成,机臂采用外侧齿轮、传动齿轮组和从动齿轮构成的行星齿轮式结构,机臂可绕机身360°转动,带动机身举升,从而实现机器人越障动作,该机器人具有控制简单、简化机构、重量轻、便于维护的优点。本发明还提供了一种机器人越障方法。
水下吸附式越障机器人及其越障方法.pdf
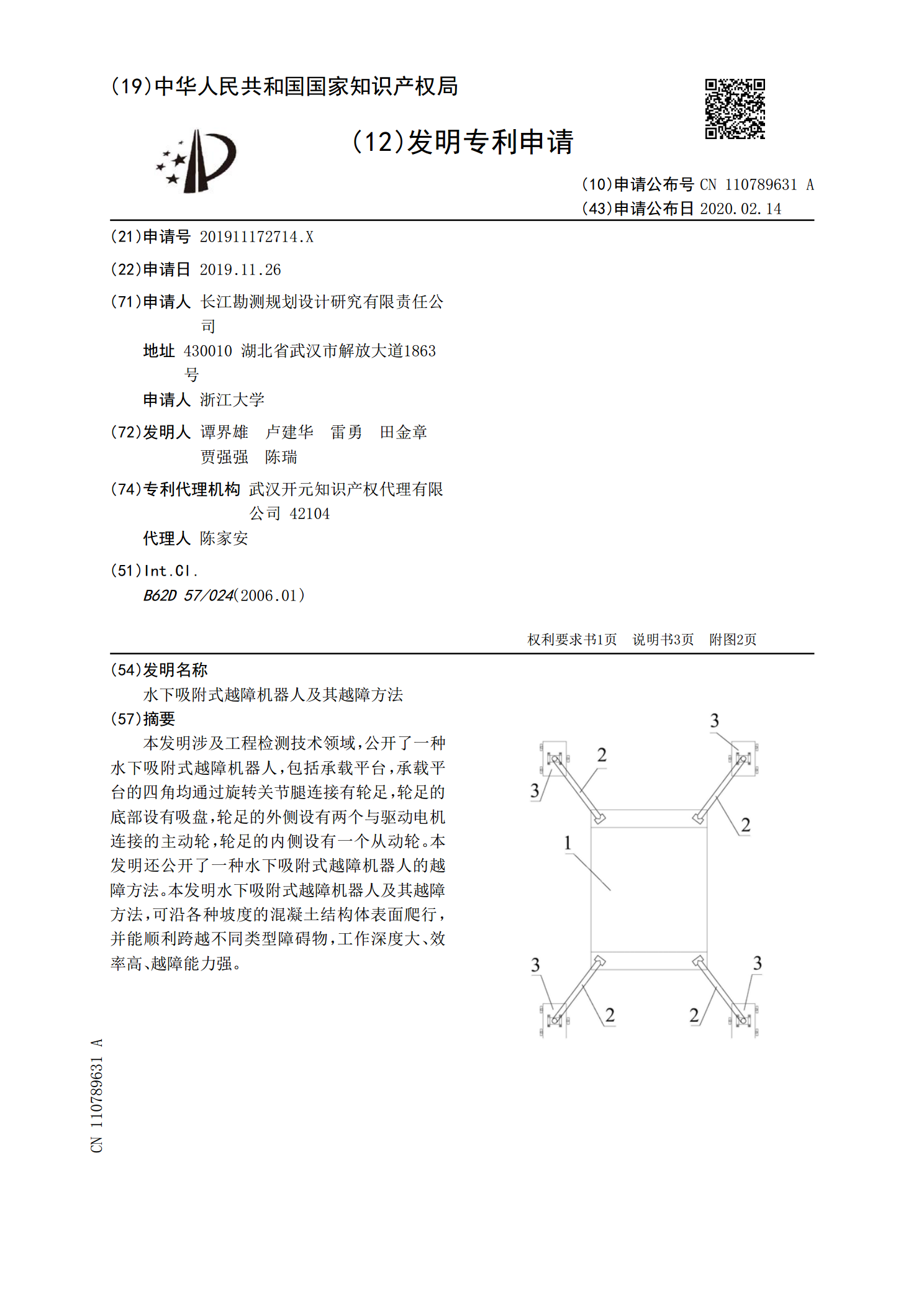
本发明涉及工程检测技术领域,公开了一种水下吸附式越障机器人,包括承载平台,承载平台的四角均通过旋转关节腿连接有轮足,轮足的底部设有吸盘,轮足的外侧设有两个与驱动电机连接的主动轮,轮足的内侧设有一个从动轮。本发明还公开了一种水下吸附式越障机器人的越障方法。本发明水下吸附式越障机器人及其越障方法,可沿各种坡度的混凝土结构体表面爬行,并能顺利跨越不同类型障碍物,工作深度大、效率高、越障能力强。
可变形式墙面清洁机器人及其清洁方法及其越障方法.pdf
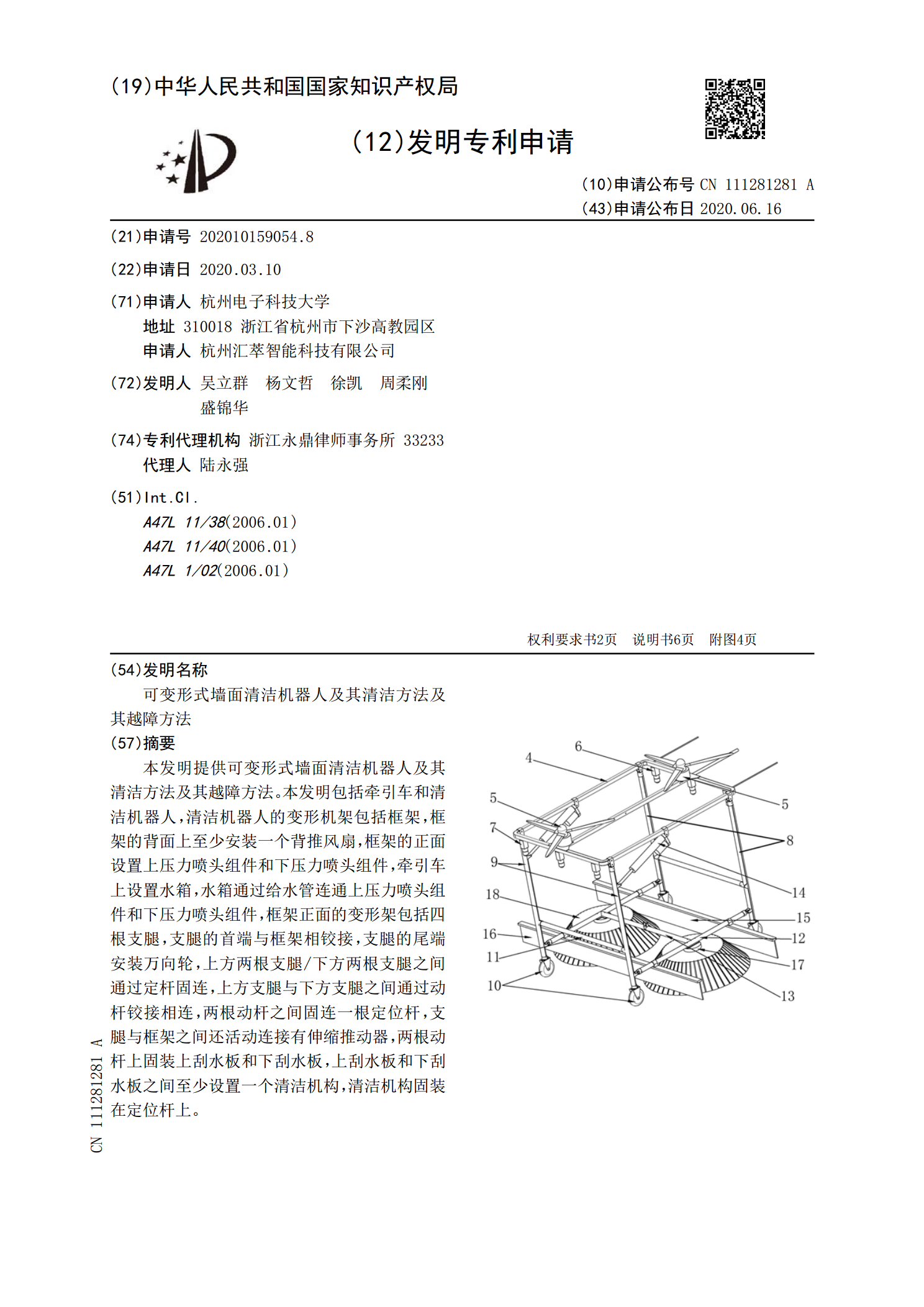
本发明提供可变形式墙面清洁机器人及其清洁方法及其越障方法。本发明包括牵引车和清洁机器人,清洁机器人的变形机架包括框架,框架的背面上至少安装一个背推风扇,框架的正面设置上压力喷头组件和下压力喷头组件,牵引车上设置水箱,水箱通过给水管连通上压力喷头组件和下压力喷头组件,框架正面的变形架包括四根支腿,支腿的首端与框架相铰接,支腿的尾端安装万向轮,上方两根支腿/下方两根支腿之间通过定杆固连,上方支腿与下方支腿之间通过动杆铰接相连,两根动杆之间固连一根定位杆,支腿与框架之间还活动连接有伸缩推动器,两根动杆上固装上刮