
清洁机器人及其控制方法.pdf

淑然****by


1/9
2/9
3/9

4/9
5/9
6/9
7/9

8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

清洁机器人及其控制方法.pdf
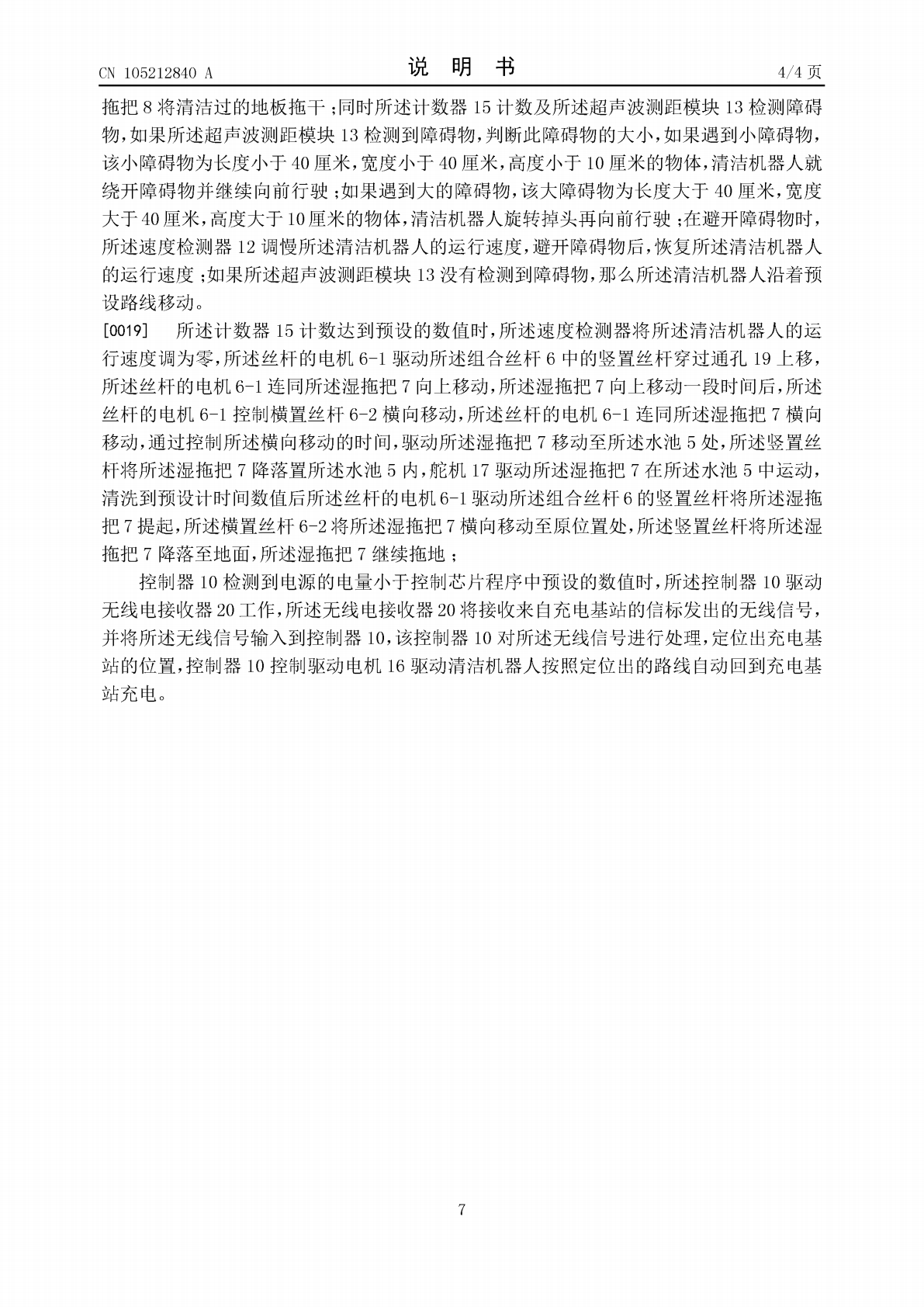
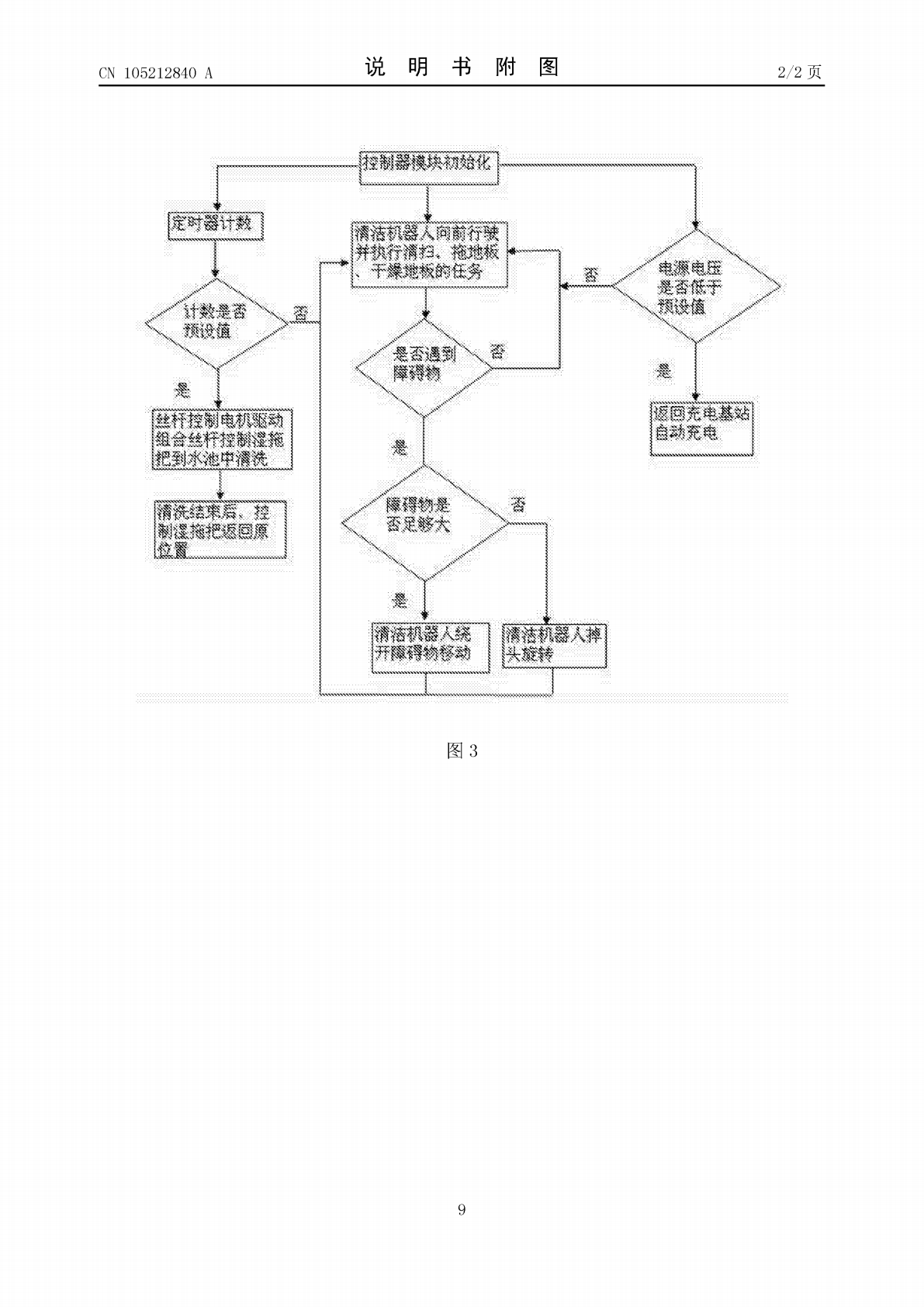
本发明公开了一种清洁机器人及其控制方法,涉及自动控制技术领域,包括设有两个前车轮的车体,车体内装有车架,在车架上设有扫把和垃圾箱,水池、与舵机的输出轴连接的湿拖把、干燥拖把,舵机安装于固定板上,舵机和丝杆的电机与控制器连接,控制器还与方位检测器、速度检测器、超声波测距模块、程序下载及调试器、计数器和驱动电机连接;控制方法:A.清洁机器人移动时中用扫把清扫垃圾,湿拖把清洁地板,干燥拖拖干地板;B.一定时间后将湿拖把送入水池中清洗,清洗后返回原来位置继续拖地;C.检测到电量小于预设值时,清洁机器人自动回到充电

清洁机器人及其控制方法.pdf
一种清洁机器人,用以清洁一特定区域,并包括一移动模块、一声波模块、一清扫模块以及一控制模块。移动模块具有多个滚轮。声波模块发射一声波,并接收多个反射波。清扫模块进行一清洁任务。控制模块根据反射波,产生一轮廓线,并根据轮廓线,控制移动模块及清扫模块的至少一者。

清洁机器人及其控制方法.pdf
一种清洁机器人及其控制方法。该清洁机器人,包括一移动模块、一清洁模块、一震动检测模块以及一控制模块。移动模块具有多个滚轮。清洁模块用以进行一清洁任务。震动检测模块检测一震波,并产生一检测信号。控制模块根据检测信号,控制移动模块及清洁模块的至少一者的运作。

清洁机器人及其控制方法.pdf
清洁机器人包括:包括行走单元、控制单元、吸尘单元、显示单元、语音单元、碰撞检测单元,其特征在于:清洁机器人至少设置有一个用于检测清洁区域内的障碍物的位置数据的障碍物检测单元,障碍物检测单元安装于清洁机器人前侧的顶部并与控制单元连接,障碍物检测单元包括用于检测清洁机器人的前方是否存在障碍物的第一检测模块和用于检测清洁机器人的顶部上方是否存在障碍物的第二检测模块。本发明方案解决了现有清洁机器人无法同时检测清洁机器人的前侧和顶部上方是否存在障碍物的问题,解决了现有清洁机器人容易出现停留在室内部分较低的空间区域内
清洁机器人及其控制方法.pdf
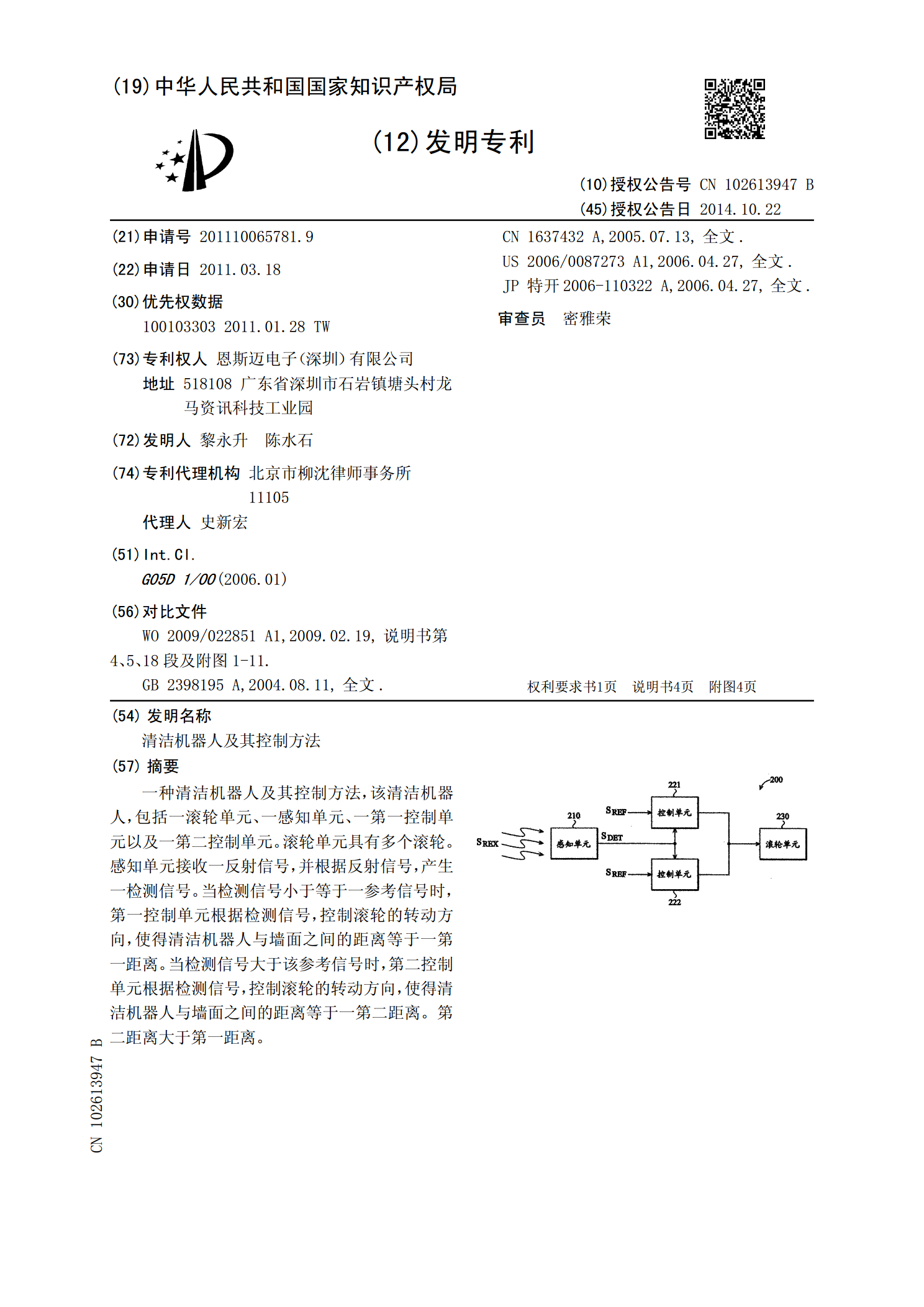
一种清洁机器人及其控制方法,该清洁机器人,包括一滚轮单元、一感知单元、一第一控制单元以及一第二控制单元。滚轮单元具有多个滚轮。感知单元接收一反射信号,并根据反射信号,产生一检测信号。当检测信号小于等于一参考信号时,第一控制单元根据检测信号,控制滚轮的转动方向,使得清洁机器人与墙面之间的距离等于一第一距离。当检测信号大于该参考信号时,第二控制单元根据检测信号,控制滚轮的转动方向,使得清洁机器人与墙面之间的距离等于一第二距离。第二距离大于第一距离。