
快速高精度电动调平收拢支腿及调平收拢方法.pdf

Ch****75

1/9
2/9
3/9
4/9
5/9

6/9
7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
快速高精度电动调平收拢支腿及调平收拢方法.pdf
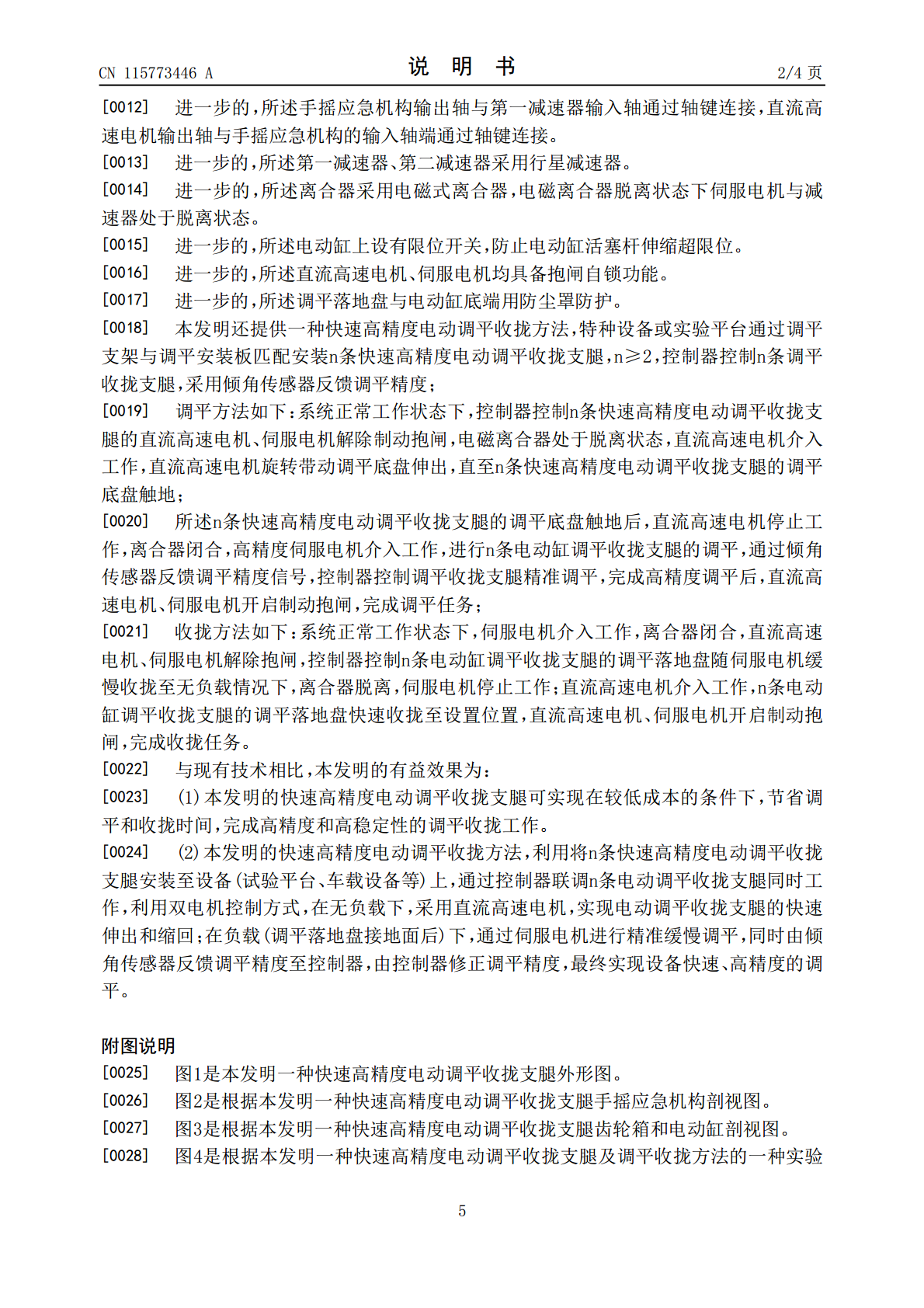
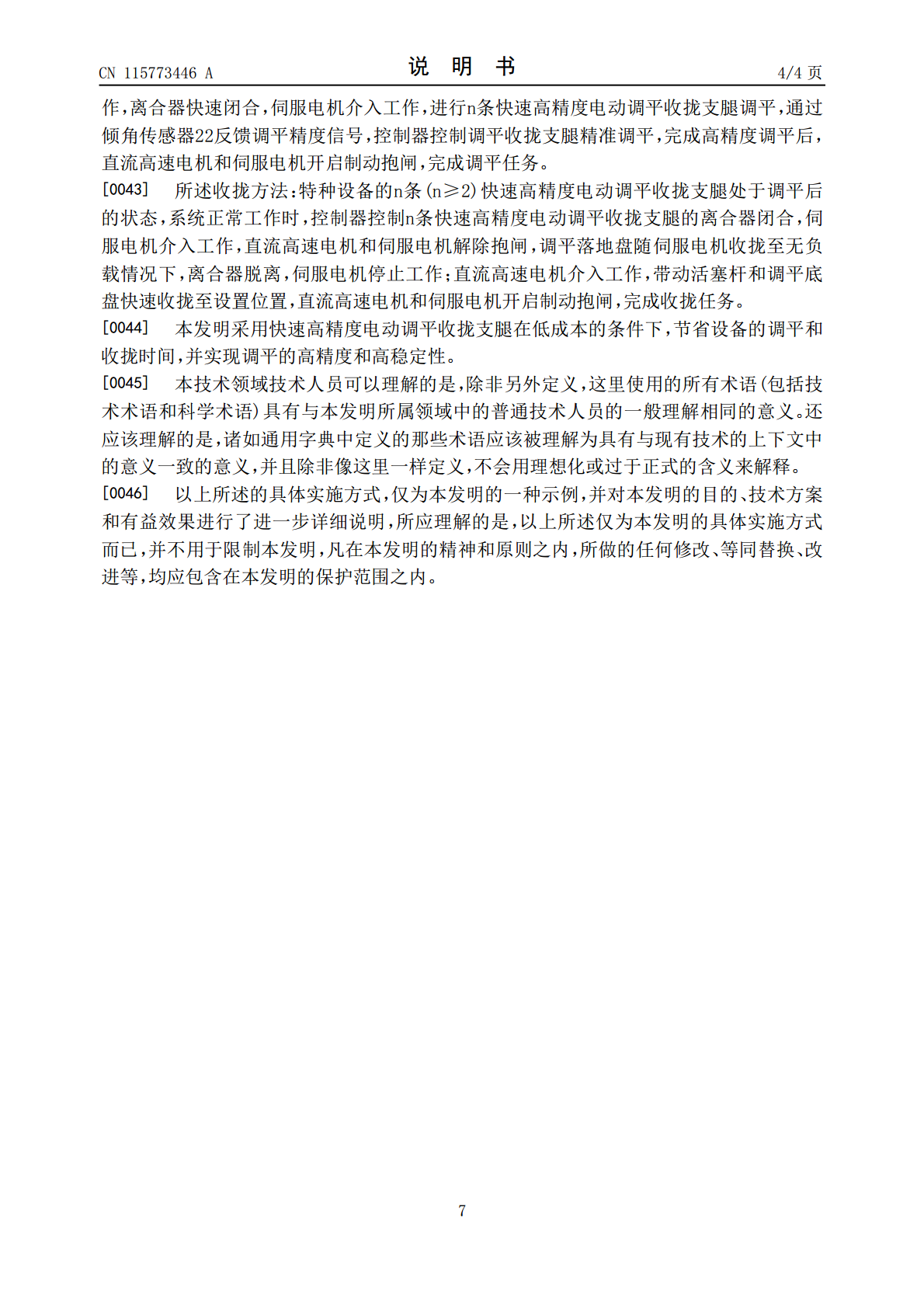
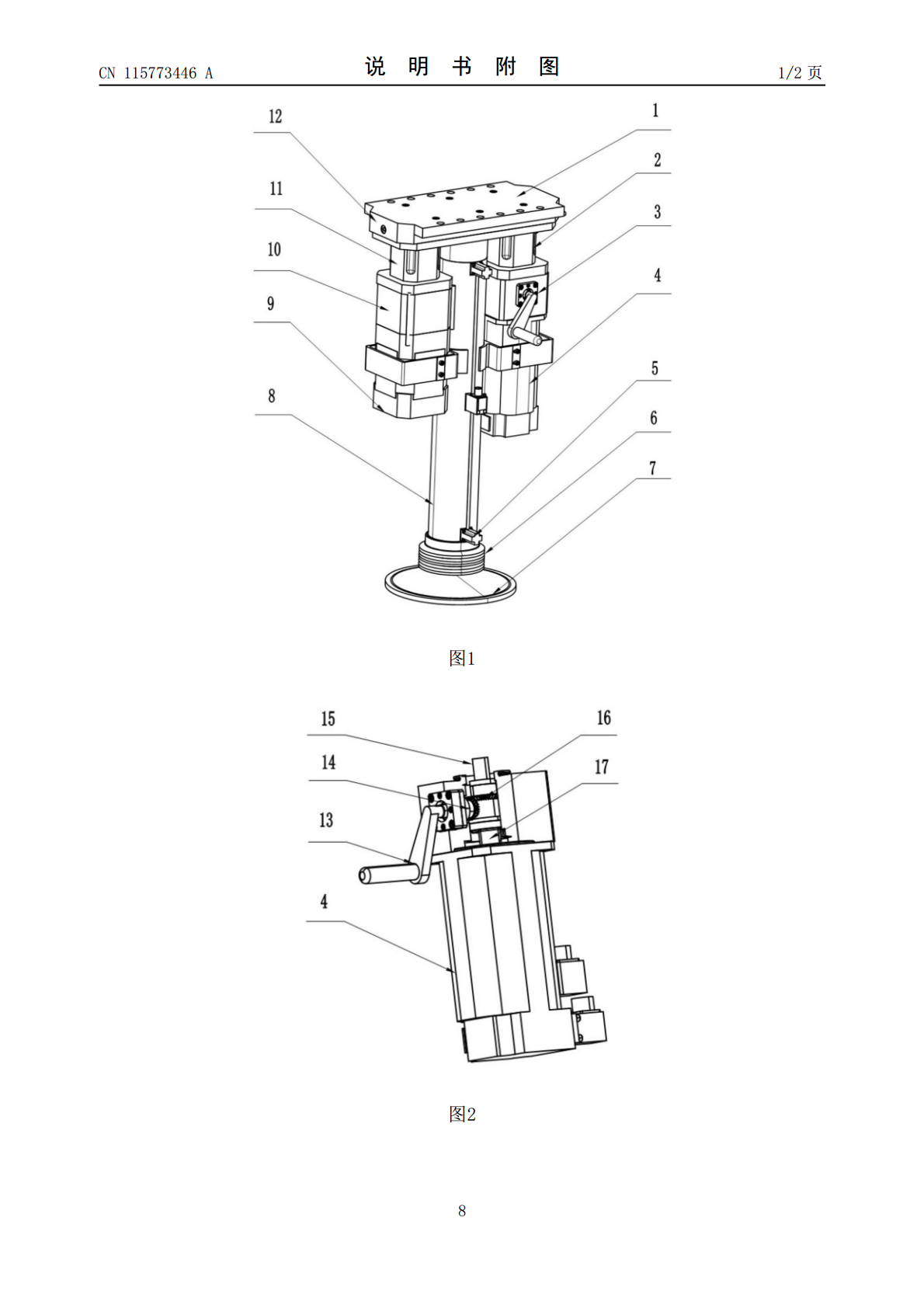
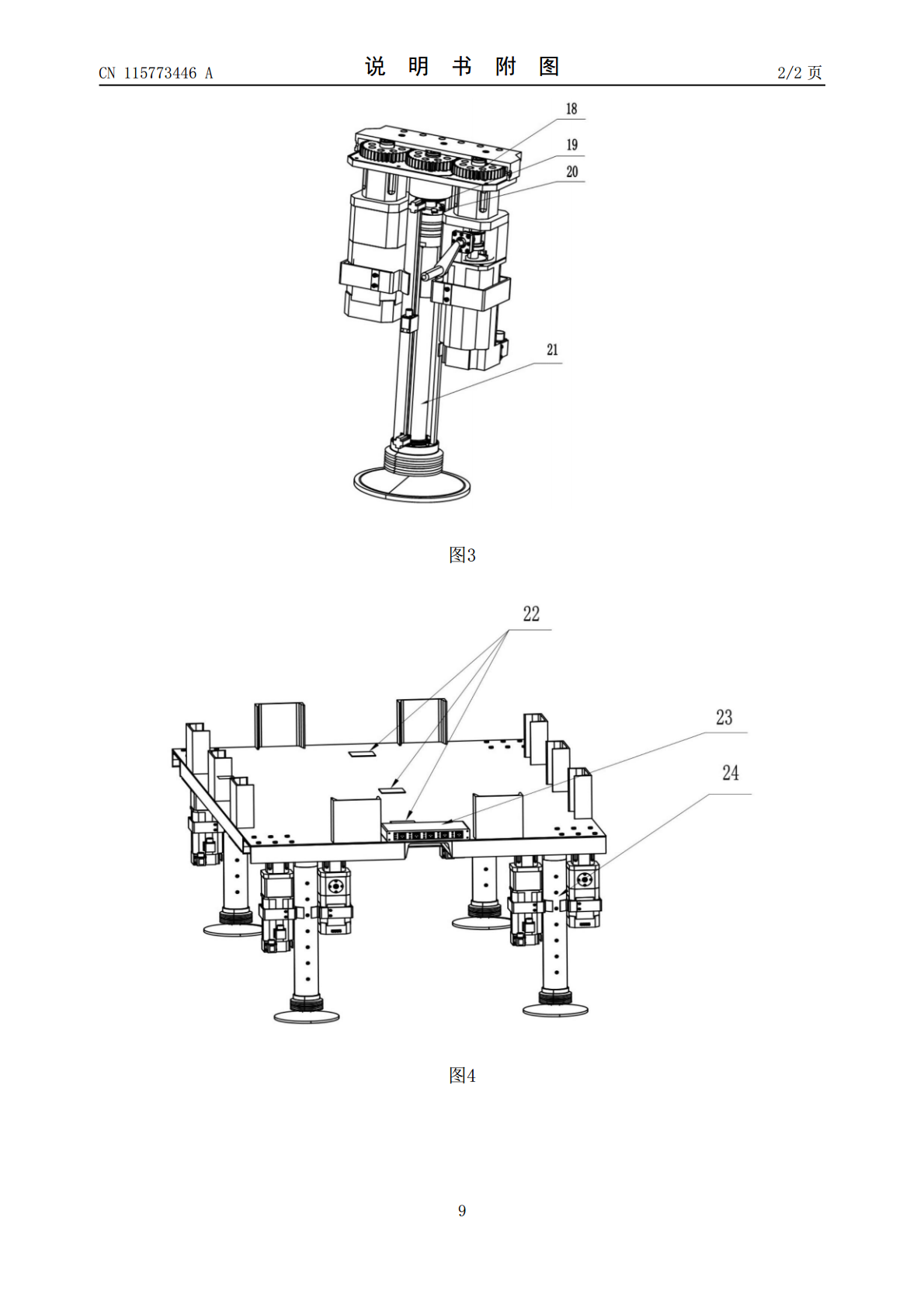
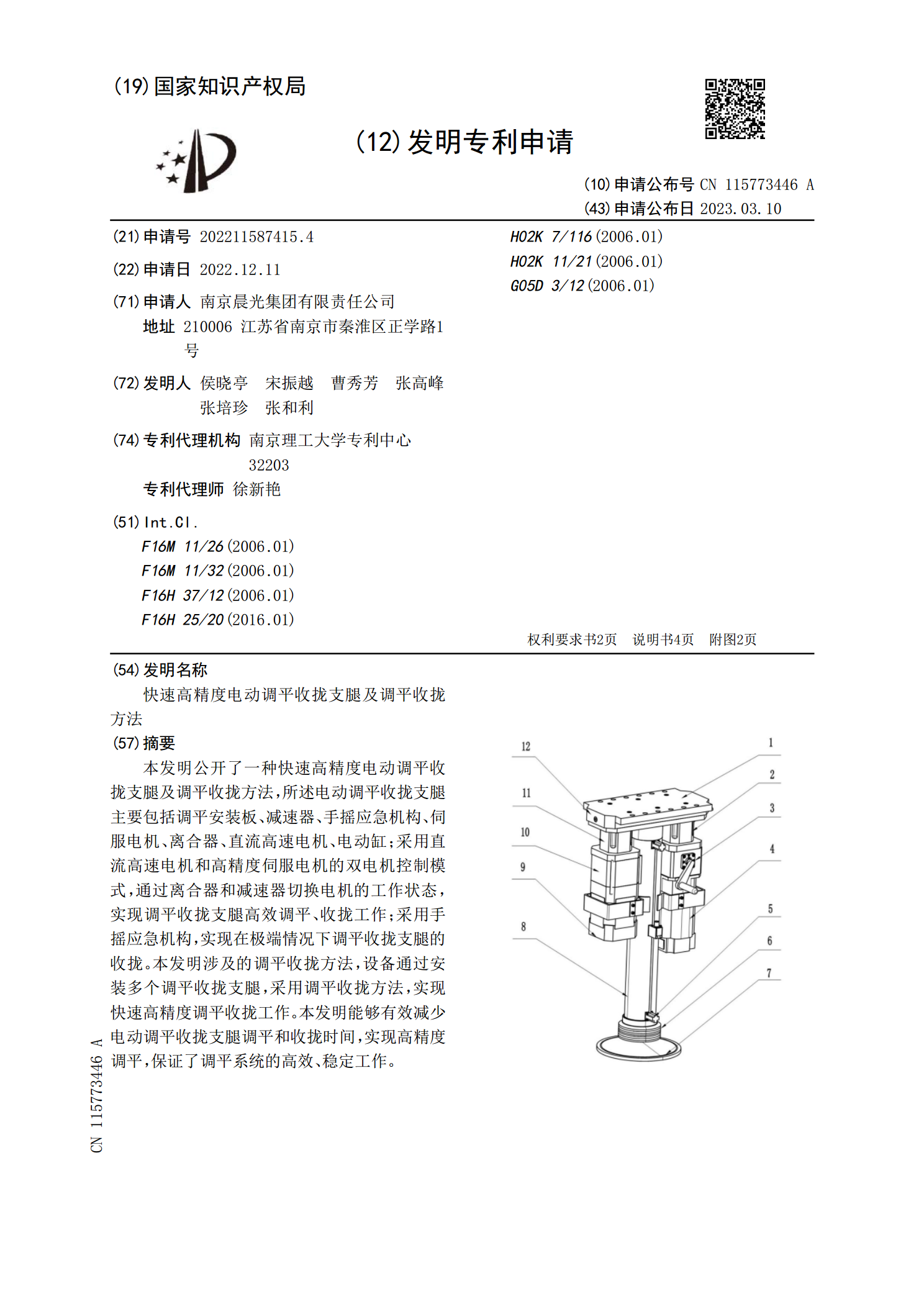
本发明公开了一种快速高精度电动调平收拢支腿及调平收拢方法,所述电动调平收拢支腿主要包括调平安装板、减速器、手摇应急机构、伺服电机、离合器、直流高速电机、电动缸;采用直流高速电机和高精度伺服电机的双电机控制模式,通过离合器和减速器切换电机的工作状态,实现调平收拢支腿高效调平、收拢工作;采用手摇应急机构,实现在极端情况下调平收拢支腿的收拢。本发明涉及的调平收拢方法,设备通过安装多个调平收拢支腿,采用调平收拢方法,实现快速高精度调平收拢工作。本发明能够有效减少电动调平收拢支腿调平和收拢时间,实现高精度调平,保证
支腿调平方法和支腿调平系统.pdf
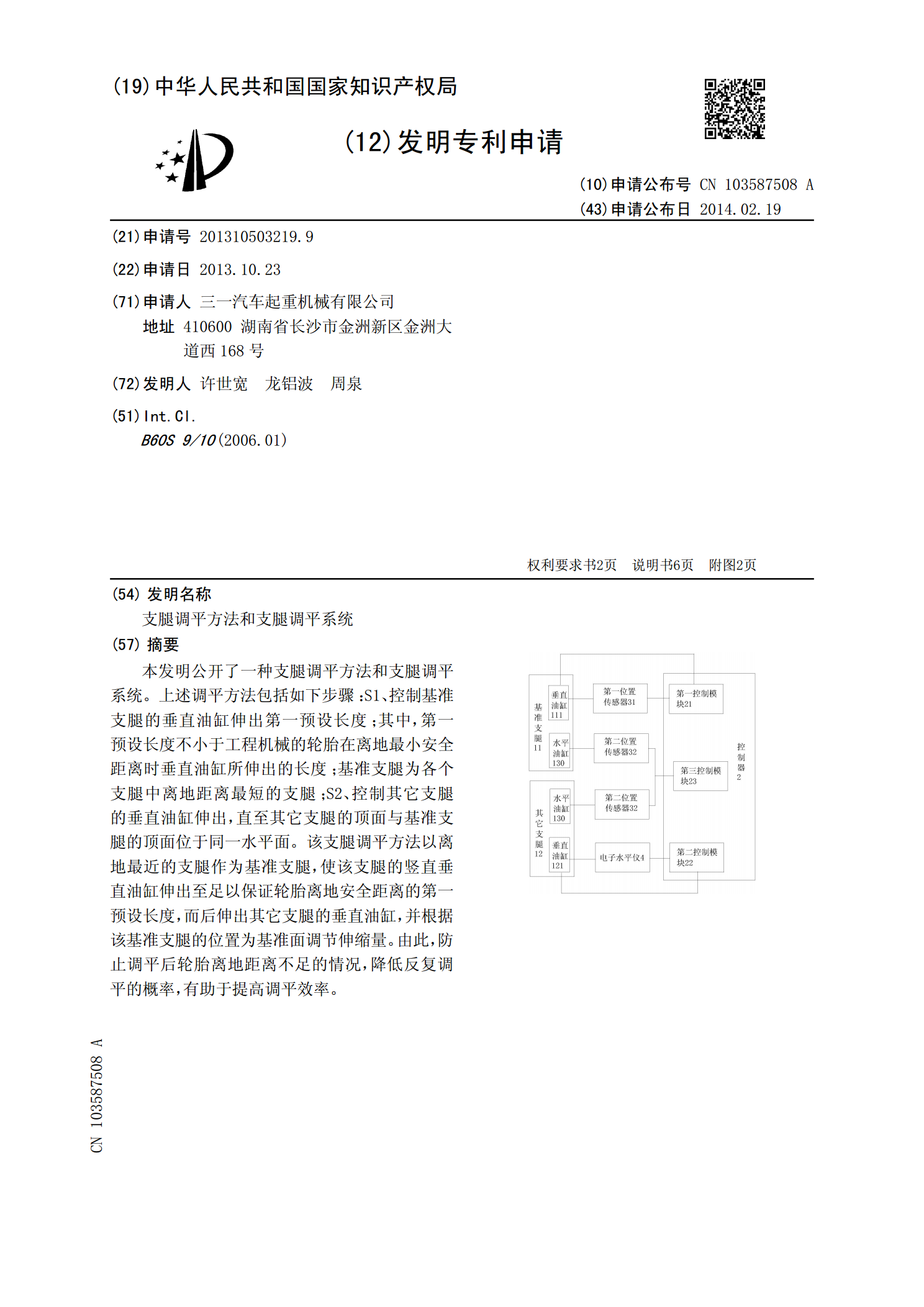
本发明公开了一种支腿调平方法和支腿调平系统。上述调平方法包括如下步骤:S1、控制基准支腿的垂直油缸伸出第一预设长度;其中,第一预设长度不小于工程机械的轮胎在离地最小安全距离时垂直油缸所伸出的长度;基准支腿为各个支腿中离地距离最短的支腿;S2、控制其它支腿的垂直油缸伸出,直至其它支腿的顶面与基准支腿的顶面位于同一水平面。该支腿调平方法以离地最近的支腿作为基准支腿,使该支腿的竖直垂直油缸伸出至足以保证轮胎离地安全距离的第一预设长度,而后伸出其它支腿的垂直油缸,并根据该基准支腿的位置为基准面调节伸缩量。由此,防
油田钻机及其支腿调平系统、支腿调平方法.pdf
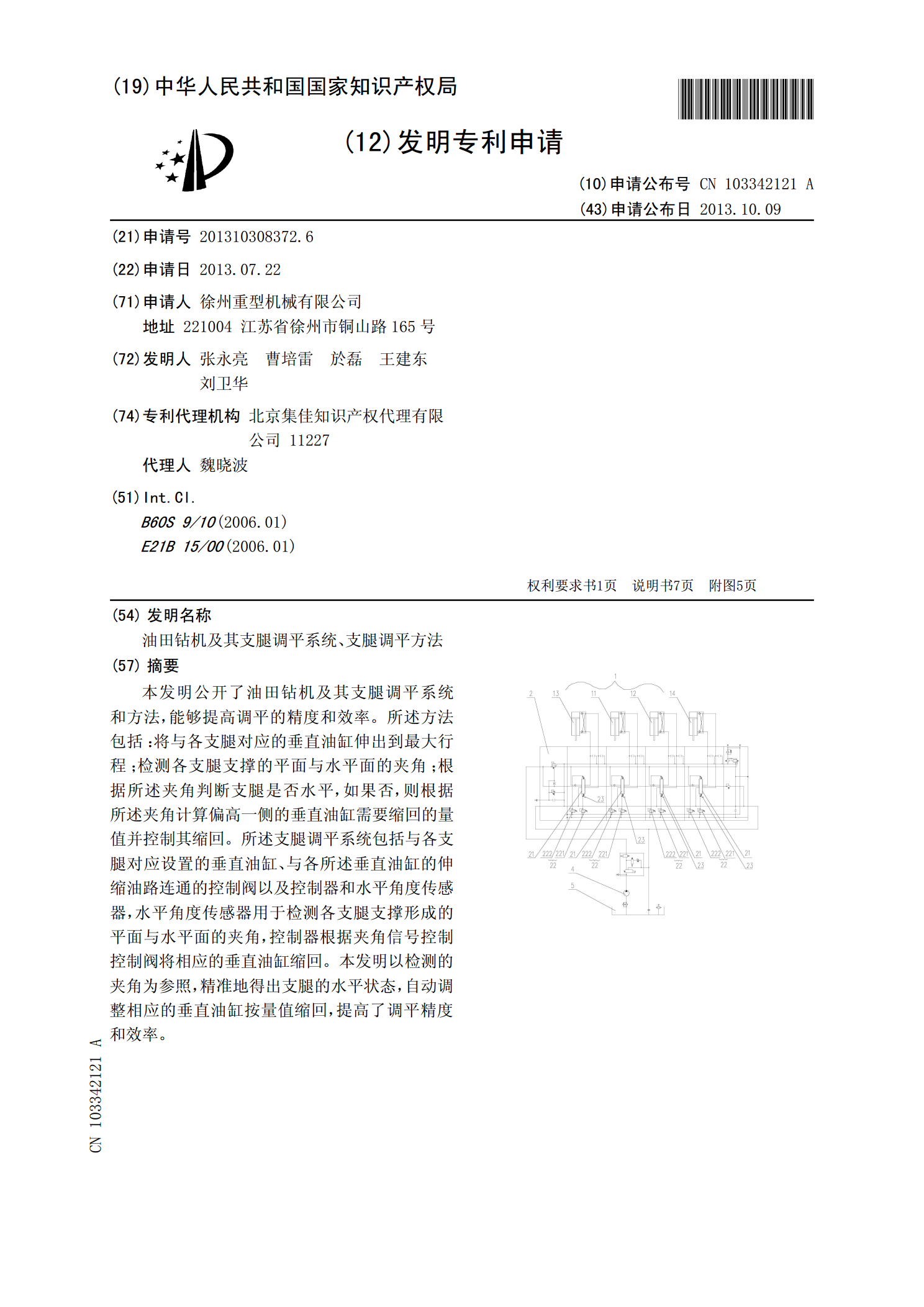
本发明公开了油田钻机及其支腿调平系统和方法,能够提高调平的精度和效率。所述方法包括:将与各支腿对应的垂直油缸伸出到最大行程;检测各支腿支撑的平面与水平面的夹角;根据所述夹角判断支腿是否水平,如果否,则根据所述夹角计算偏高一侧的垂直油缸需要缩回的量值并控制其缩回。所述支腿调平系统包括与各支腿对应设置的垂直油缸、与各所述垂直油缸的伸缩油路连通的控制阀以及控制器和水平角度传感器,水平角度传感器用于检测各支腿支撑形成的平面与水平面的夹角,控制器根据夹角信号控制控制阀将相应的垂直油缸缩回。本发明以检测的夹角为参照,
一体化高精度调平支腿.pdf
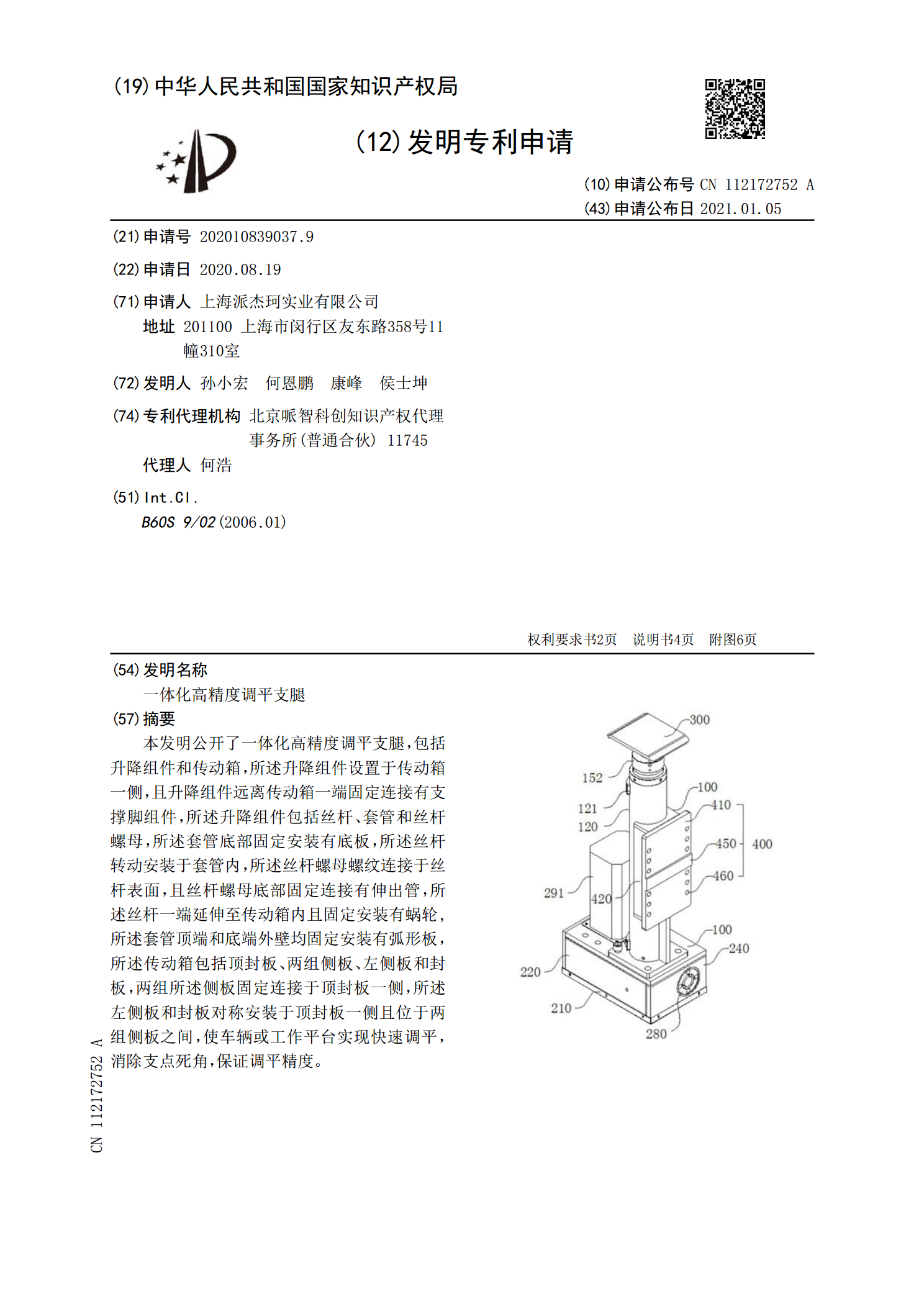
本发明公开了一体化高精度调平支腿,包括升降组件和传动箱,所述升降组件设置于传动箱一侧,且升降组件远离传动箱一端固定连接有支撑脚组件,所述升降组件包括丝杆、套管和丝杆螺母,所述套管底部固定安装有底板,所述丝杆转动安装于套管内,所述丝杆螺母螺纹连接于丝杆表面,且丝杆螺母底部固定连接有伸出管,所述丝杆一端延伸至传动箱内且固定安装有蜗轮,所述套管顶端和底端外壁均固定安装有弧形板,所述传动箱包括顶封板、两组侧板、左侧板和封板,两组所述侧板固定连接于顶封板一侧,所述左侧板和封板对称安装于顶封板一侧且位于两组侧板之间,
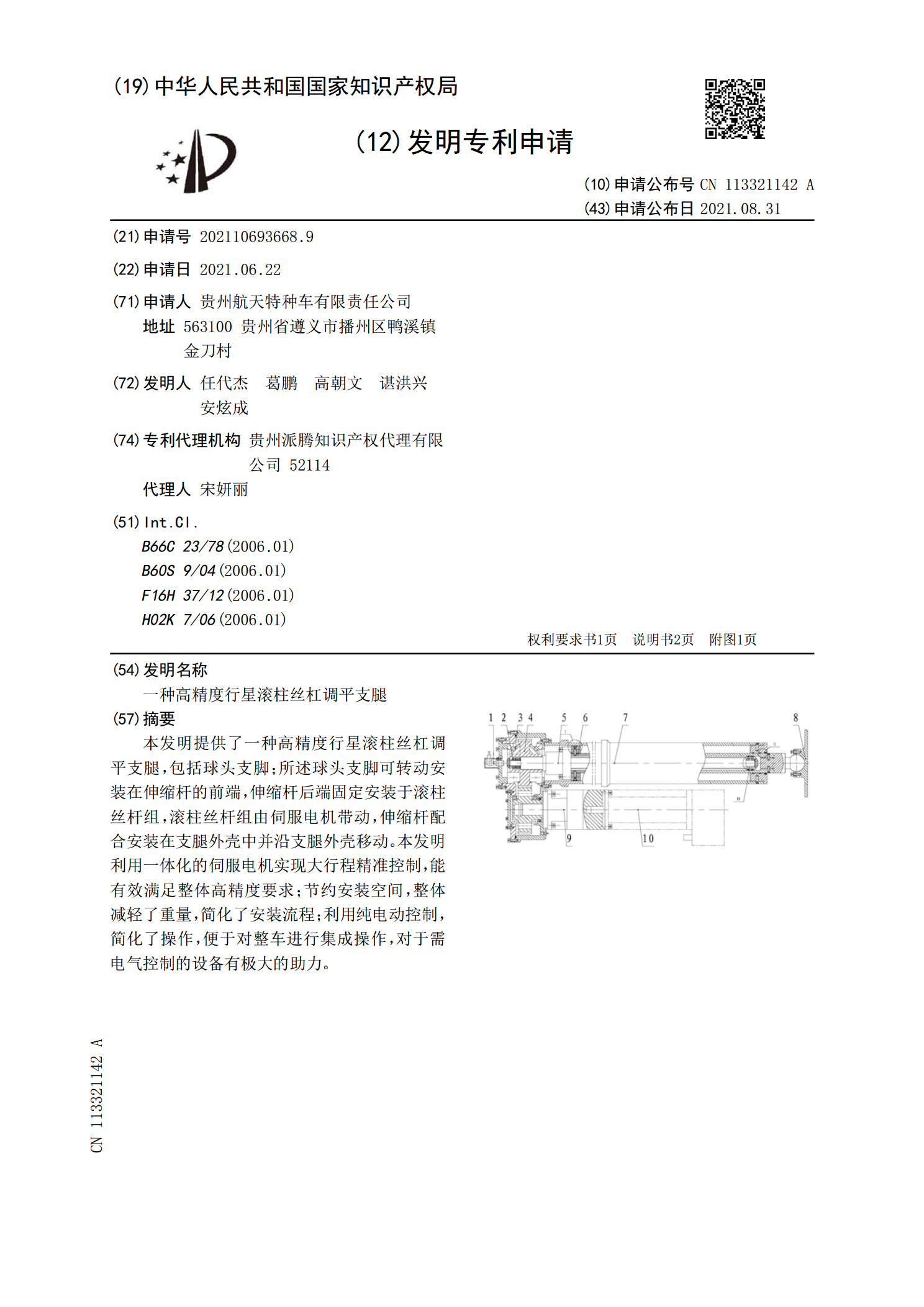
一种高精度行星滚柱丝杠调平支腿.pdf
本发明提供了一种高精度行星滚柱丝杠调平支腿,包括球头支脚;所述球头支脚可转动安装在伸缩杆的前端,伸缩杆后端固定安装于滚柱丝杆组,滚柱丝杆组由伺服电机带动,伸缩杆配合安装在支腿外壳中并沿支腿外壳移动。本发明利用一体化的伺服电机实现大行程精准控制,能有效满足整体高精度要求;节约安装空间,整体减轻了重量,简化了安装流程;利用纯电动控制,简化了操作,便于对整车进行集成操作,对于需电气控制的设备有极大的助力。