
一种基于自适应学习的自动驾驶车辆轨迹跟踪控制方法.pdf

是你****晨呀


1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共21页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于自适应学习的自动驾驶车辆轨迹跟踪控制方法.pdf
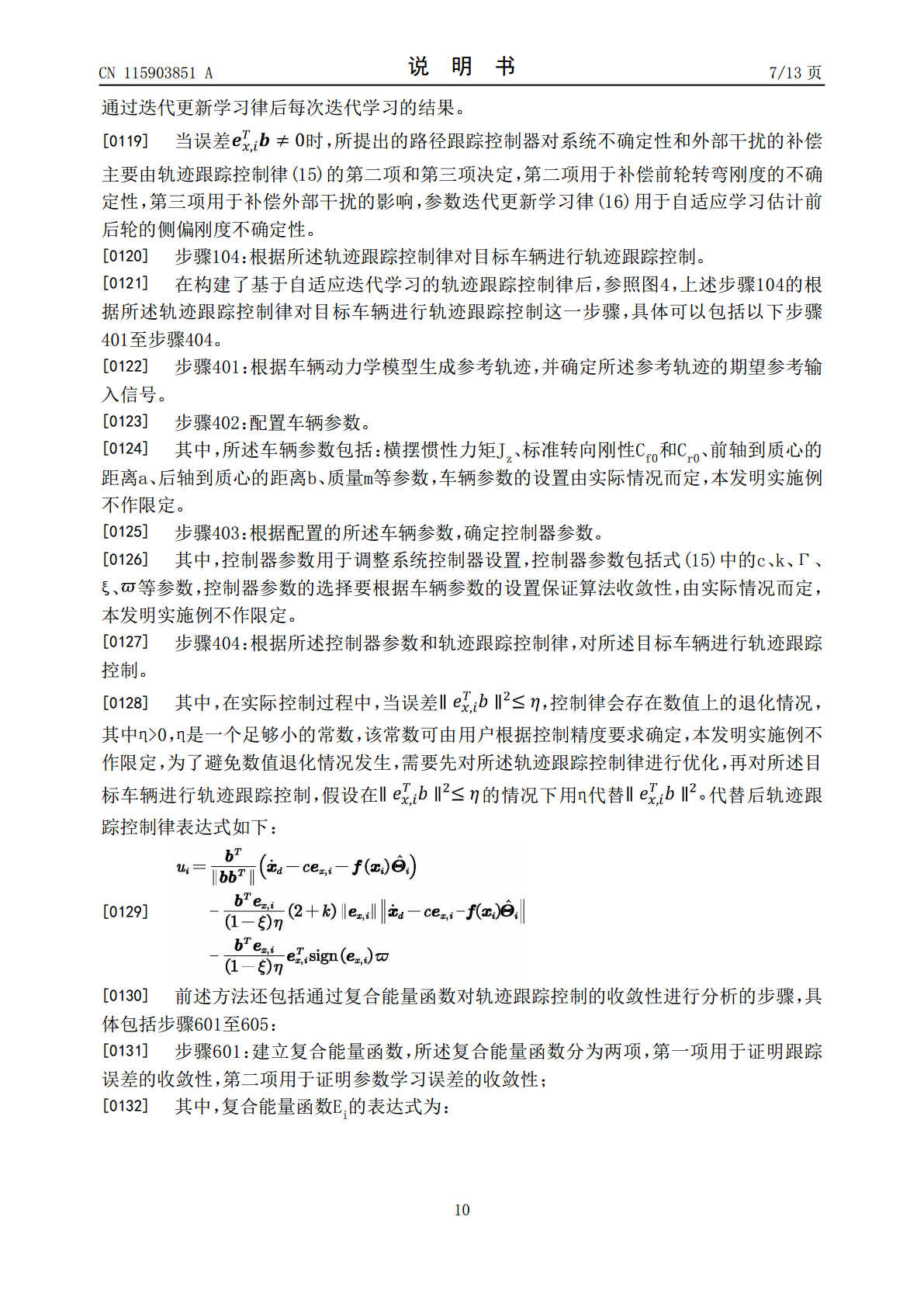
本发明公开了一种基于自适应学习的自动驾驶车辆轨迹跟踪控制方法、装置、电子设备,方法具体包括:对车辆动力学模型进行参数化表征构建参数化车辆动态模型,基于参数化车辆动态模型构建基于自适应学习的自动驾驶车辆轨迹跟踪控制律,根据轨迹跟踪控制律对目标车辆进行轨迹跟踪控制。本发明解决了由于车辆动力学的非线性和驾驶环境的不确定性,导致车辆系统控制方法性能下降以及无法自适应学习的问题,通过构建参数化车辆动态模型,剥离了车辆系统的已知和未知信息,通过构建基于自适应学习的轨迹跟踪控制方法,让车辆可以学习系统的重复运行特征,还
一种自动驾驶车辆轨迹跟踪方法.pdf
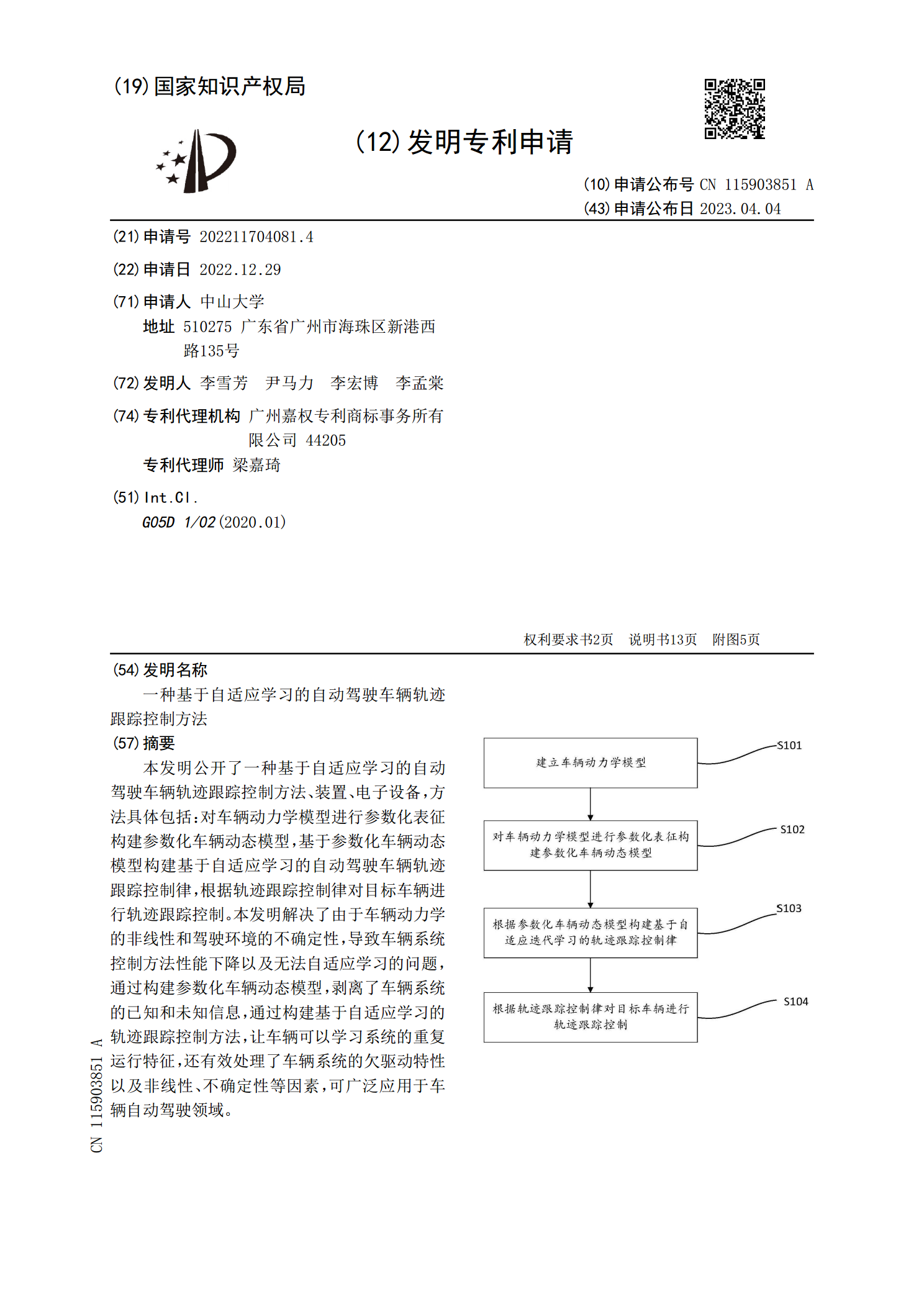
本发明涉及一种轨迹跟踪方法,具体涉及一种自动驾驶车辆轨迹跟踪方法;具体公开了通过在预测模型的代价函数中加入一个虚拟的用于表示真正作用于自动驾驶车辆的前轮倾角δ
基于滑模控制的自动驾驶车辆间距自适应控制方法.pdf
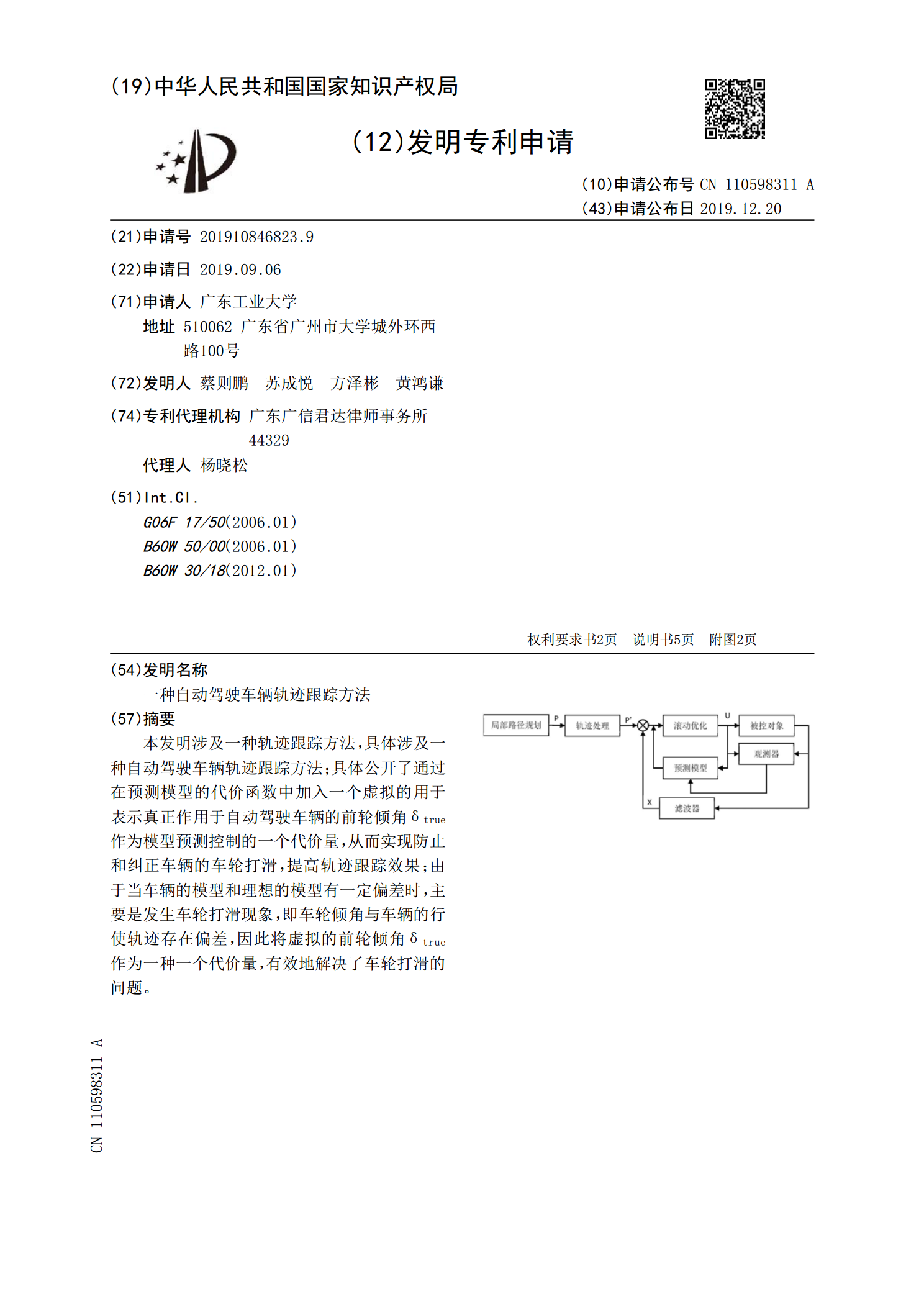
本发明公开了一种基于滑模控制的自动驾驶车辆间距自适应控制方法,通过建立车辆动力学控制方程,建立滑模面,以指数趋近律为基础,获取加速度输出,结合模型参考自适应控制算法,最终获取理想加速度输出,用于纵向调节自动驾驶车辆与前车的间距。本发明能够提高控制精度,可以有效地解决自动驾驶纵向间距控制过程中的系统抖振,外界扰动,和非线性因素引起的干扰,从而明显地改善控制系统性能,提升纵向间距控制的稳定性和精确性。同时可以有效解决车辆控制不确定性以及参数特性时变的问题,能够按照自适应参数调节控制律,使得车辆被控性能达到预期
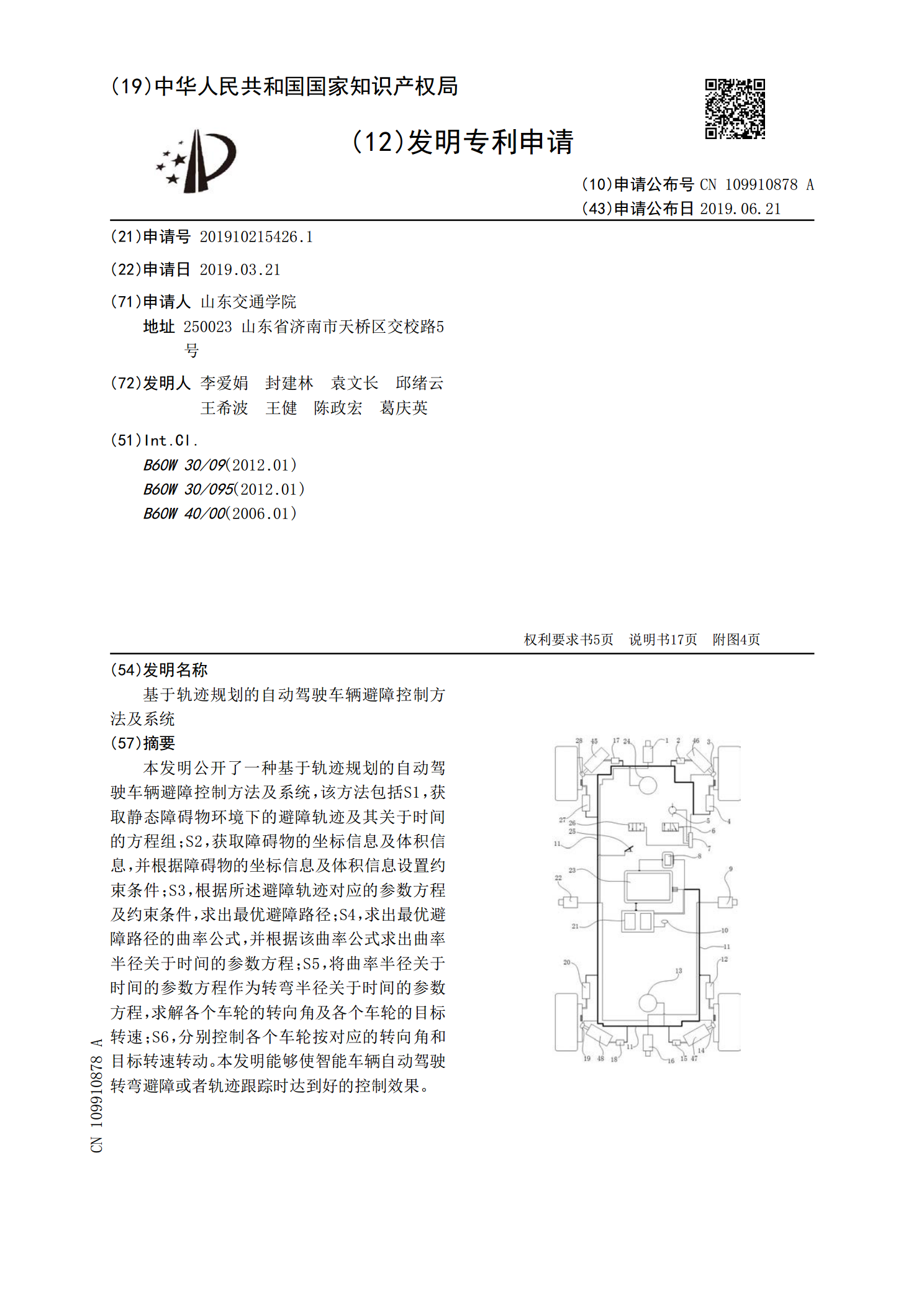
基于轨迹规划的自动驾驶车辆避障控制方法及系统.pdf
本发明公开了一种基于轨迹规划的自动驾驶车辆避障控制方法及系统,该方法包括S1,获取静态障碍物环境下的避障轨迹及其关于时间的方程组;S2,获取障碍物的坐标信息及体积信息,并根据障碍物的坐标信息及体积信息设置约束条件;S3,根据所述避障轨迹对应的参数方程及约束条件,求出最优避障路径;S4,求出最优避障路径的曲率公式,并根据该曲率公式求出曲率半径关于时间的参数方程;S5,将曲率半径关于时间的参数方程作为转弯半径关于时间的参数方程,求解各个车轮的转向角及各个车轮的目标转速;S6,分别控制各个车轮按对应的转向角和目
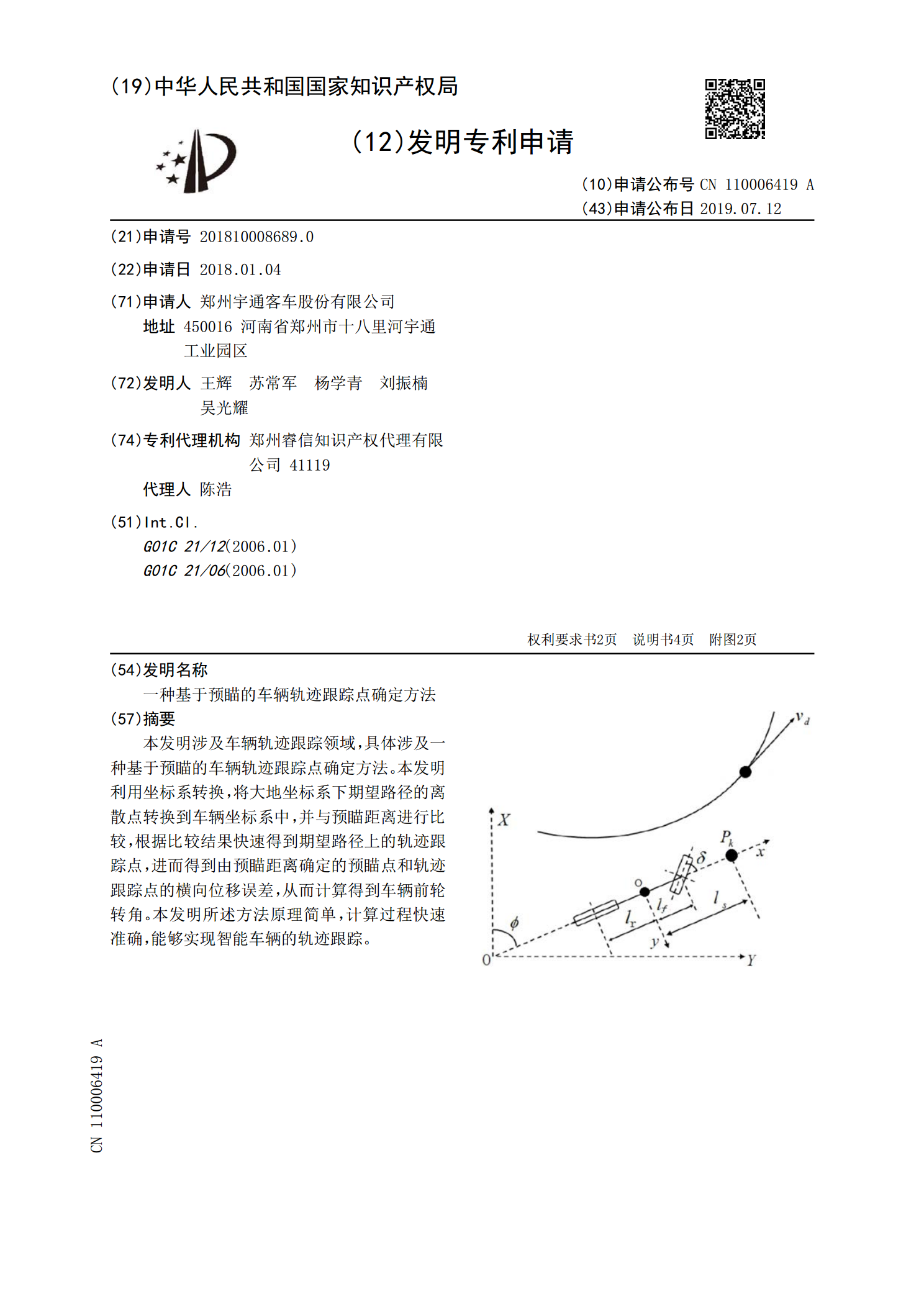
一种基于预瞄的车辆轨迹跟踪点确定方法.pdf
本发明涉及车辆轨迹跟踪领域,具体涉及一种基于预瞄的车辆轨迹跟踪点确定方法。本发明利用坐标系转换,将大地坐标系下期望路径的离散点转换到车辆坐标系中,并与预瞄距离进行比较,根据比较结果快速得到期望路径上的轨迹跟踪点,进而得到由预瞄距离确定的预瞄点和轨迹跟踪点的横向位移误差,从而计算得到车辆前轮转角。本发明所述方法原理简单,计算过程快速准确,能够实现智能车辆的轨迹跟踪。