
一种基于预瞄的车辆轨迹跟踪点确定方法.pdf

小凌****甜蜜


1/9
2/9
3/9
4/9
5/9

6/9
7/9

8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种基于预瞄的车辆轨迹跟踪点确定方法.pdf
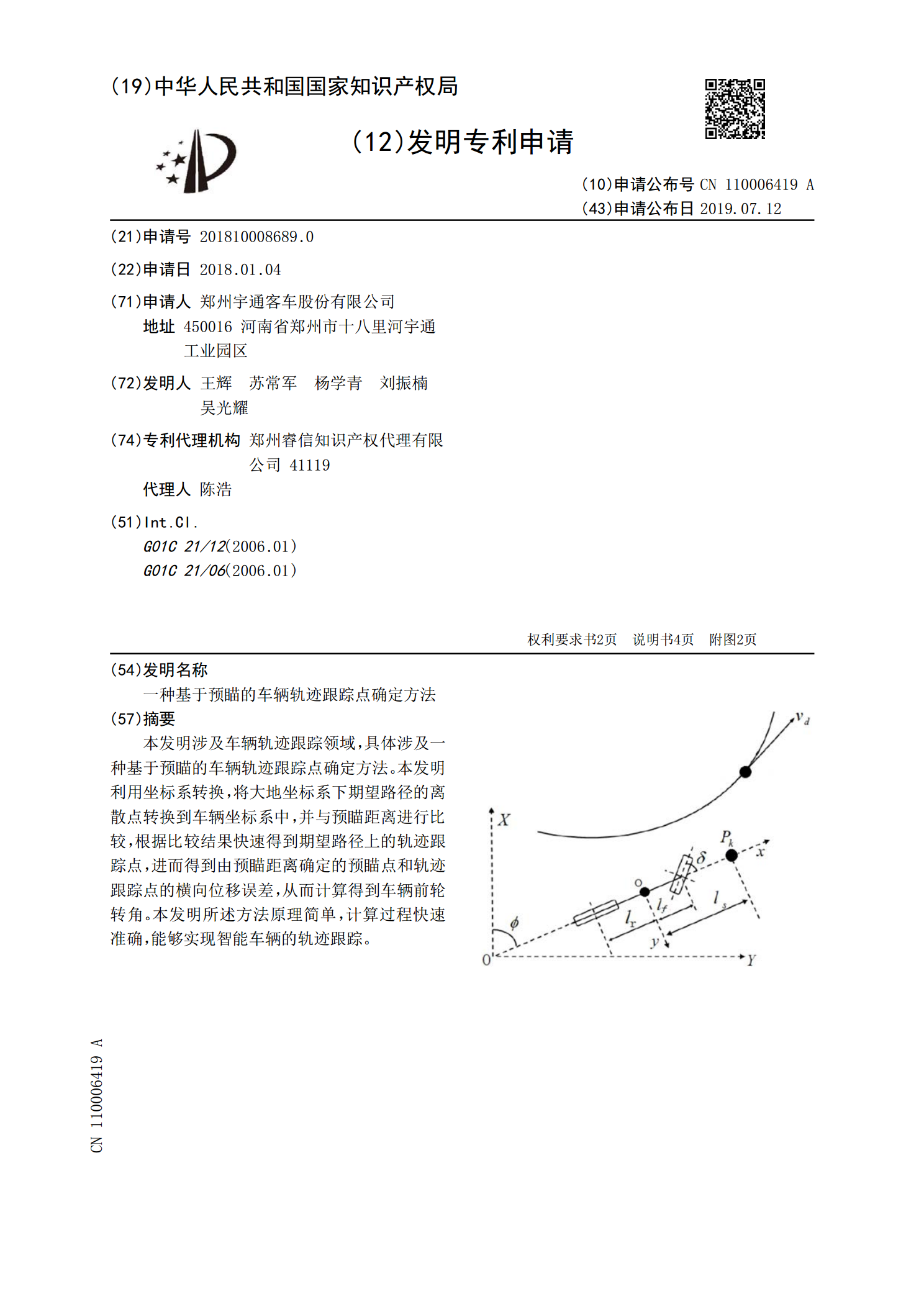
本发明涉及车辆轨迹跟踪领域,具体涉及一种基于预瞄的车辆轨迹跟踪点确定方法。本发明利用坐标系转换,将大地坐标系下期望路径的离散点转换到车辆坐标系中,并与预瞄距离进行比较,根据比较结果快速得到期望路径上的轨迹跟踪点,进而得到由预瞄距离确定的预瞄点和轨迹跟踪点的横向位移误差,从而计算得到车辆前轮转角。本发明所述方法原理简单,计算过程快速准确,能够实现智能车辆的轨迹跟踪。

基于预瞄理论的智能驾驶客车轨迹跟踪控制方法研究.docx
基于预瞄理论的智能驾驶客车轨迹跟踪控制方法研究基于预瞄理论的智能驾驶客车轨迹跟踪控制方法研究摘要:随着智能驾驶技术的不断发展,智能驾驶客车的轨迹跟踪控制越来越受到关注。本文基于预瞄理论,研究了一种智能驾驶客车轨迹跟踪控制方法。首先,对预瞄理论进行了简要介绍,然后提出了基于预瞄理论的客车轨迹跟踪控制算法,包括车辆模型建立、路径规划和控制器设计。最后,通过仿真实验验证了所提出方法的有效性。关键词:智能驾驶客车;轨迹跟踪控制;预瞄理论;车辆模型;路径规划;控制器设计;仿真实验1.引言智能驾驶技术是近年来汽车行业

一种基于预瞄控制的Robocup足球机器人带球轨迹跟踪方法.docx
一种基于预瞄控制的Robocup足球机器人带球轨迹跟踪方法AbstractInthispaper,weproposeatrajectorytrackingmethodforRobocupsoccerrobotsbasedonpreviewcontrol.Themethodutilizesamodelpredictivecontroller(MPC)topredictthefuturemotionoftherobotandgeneratecontrolinputsforit.Theproposedmetho

基于预瞄的智能车位姿补偿轨迹跟踪算法.docx
基于预瞄的智能车位姿补偿轨迹跟踪算法基于预瞄的智能车位姿补偿轨迹跟踪算法摘要:智能车位姿补偿轨迹跟踪算法是智能汽车技术中的关键算法之一。本论文提出了一种基于预瞄的智能车位姿补偿轨迹跟踪算法,该算法通过预瞄车位姿的变化趋势,实现了智能车在狭小空间内的精确停放。我们通过数值仿真验证了该算法的有效性和实用性。1.引言智能汽车技术在过去几年中取得了显著的进展,其中车位姿补偿轨迹跟踪算法是智能汽车技术发展的重要组成部分之一。车位姿补偿轨迹跟踪算法旨在通过车辆自身的传感器信息和环境相关的数据来实现智能车在有限空间内的

基于弧长预瞄的车辆侧向跟踪控制研究.docx
基于弧长预瞄的车辆侧向跟踪控制研究一、前言车辆侧向跟踪控制是车辆控制领域的一个重要研究方向。该控制策略的目的是使车辆沿着所需的轨迹行驶,同时保持稳定和安全。车辆侧向跟踪控制的主要挑战之一是如何有效地预测前方道路的曲率或弯度。在传统的车辆控制策略中,车辆运动轨迹是通过路标或者GPS来确定的。然而,确保道路上的注记和GPS的可靠性是非常困难的。因此,研究基于弧长预瞄的车辆侧向跟踪控制策略具有非常重要的实际意义。本文将探讨基于弧长预瞄的车辆侧向跟踪控制策略,并对其关键技术进行分析和评价。二、基于弧长预瞄的车辆侧