
一种自动驾驶车辆轨迹跟踪方法.pdf

听云****君哇

1/10

2/10

3/10
4/10

5/10

6/10

7/10
8/10
9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种自动驾驶车辆轨迹跟踪方法.pdf
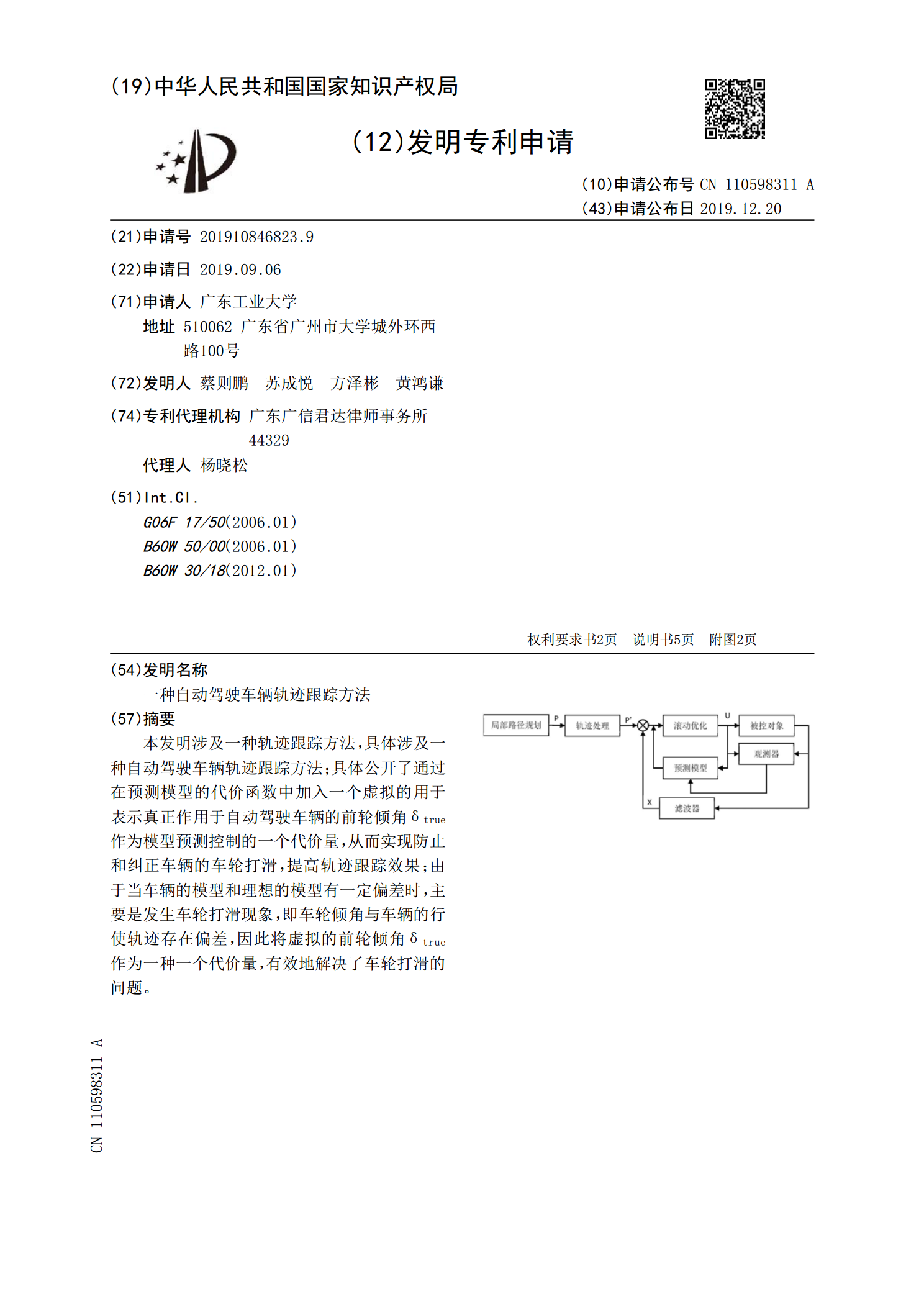
本发明涉及一种轨迹跟踪方法,具体涉及一种自动驾驶车辆轨迹跟踪方法;具体公开了通过在预测模型的代价函数中加入一个虚拟的用于表示真正作用于自动驾驶车辆的前轮倾角δ
一种基于自适应学习的自动驾驶车辆轨迹跟踪控制方法.pdf
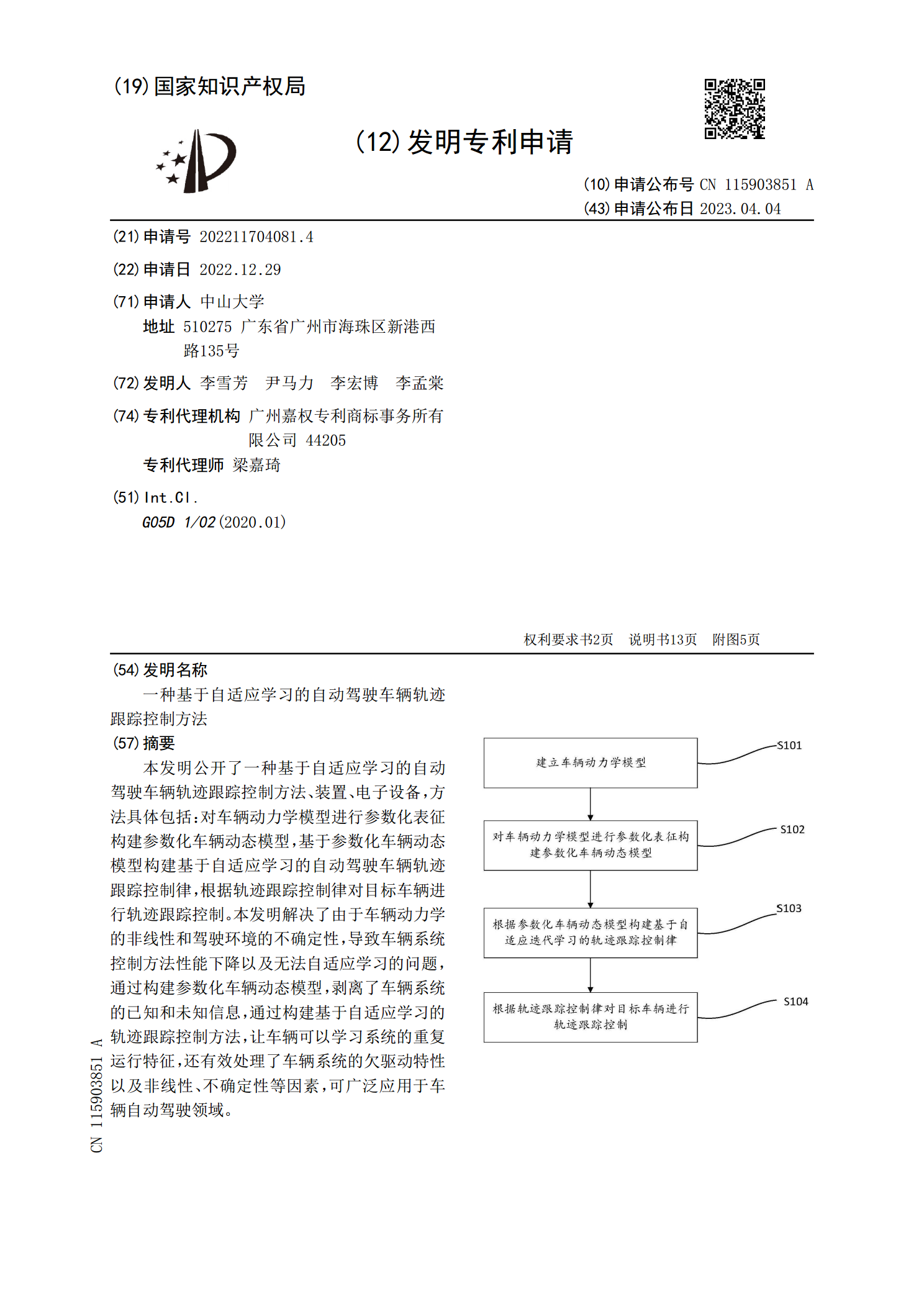
本发明公开了一种基于自适应学习的自动驾驶车辆轨迹跟踪控制方法、装置、电子设备,方法具体包括:对车辆动力学模型进行参数化表征构建参数化车辆动态模型,基于参数化车辆动态模型构建基于自适应学习的自动驾驶车辆轨迹跟踪控制律,根据轨迹跟踪控制律对目标车辆进行轨迹跟踪控制。本发明解决了由于车辆动力学的非线性和驾驶环境的不确定性,导致车辆系统控制方法性能下降以及无法自适应学习的问题,通过构建参数化车辆动态模型,剥离了车辆系统的已知和未知信息,通过构建基于自适应学习的轨迹跟踪控制方法,让车辆可以学习系统的重复运行特征,还
一种行人轨迹预测方法及车辆的自动驾驶方法.pdf
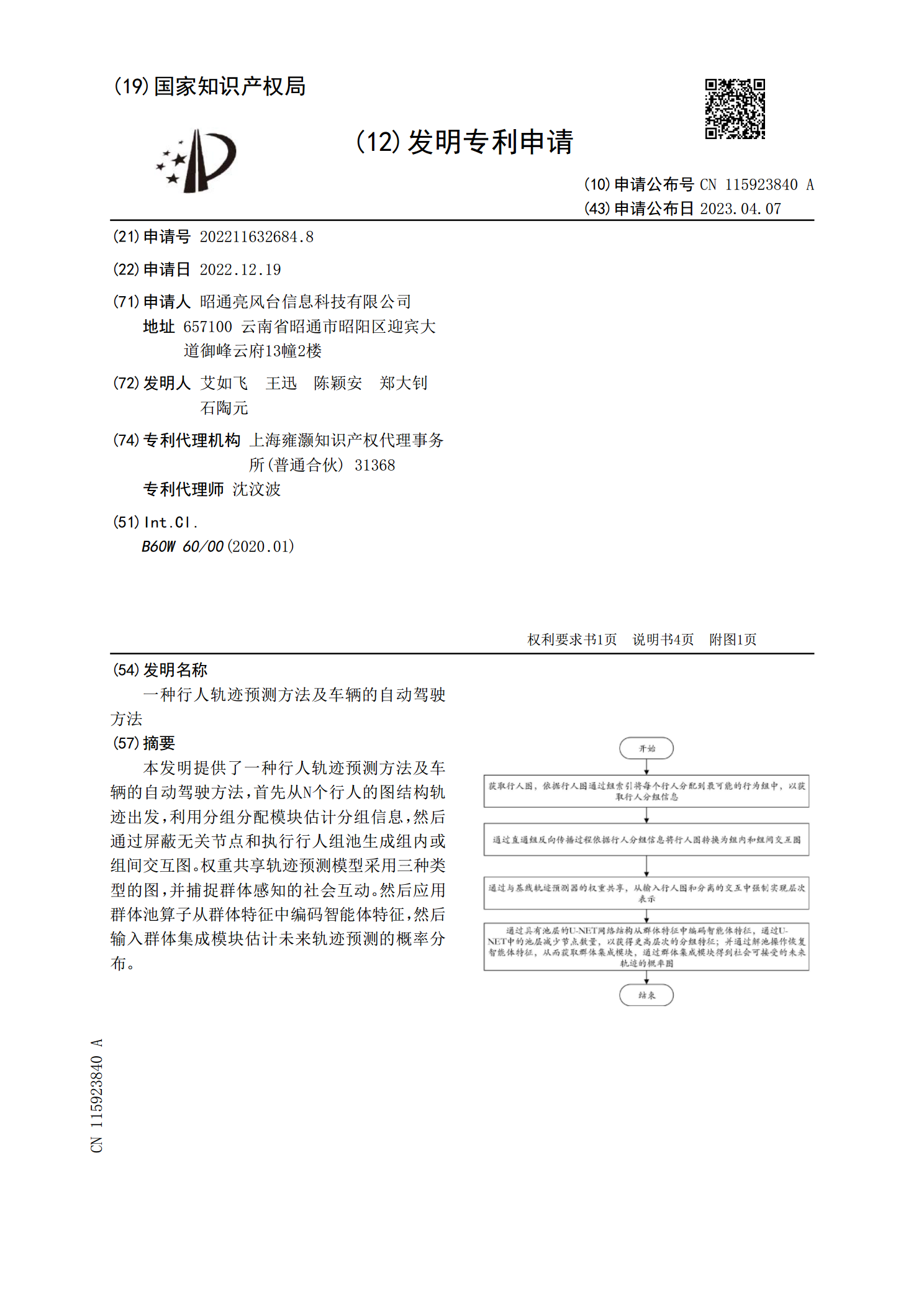
本发明提供了一种行人轨迹预测方法及车辆的自动驾驶方法,首先从N个行人的图结构轨迹出发,利用分组分配模块估计分组信息,然后通过屏蔽无关节点和执行行人组池生成组内或组间交互图。权重共享轨迹预测模型采用三种类型的图,并捕捉群体感知的社会互动。然后应用群体池算子从群体特征中编码智能体特征,然后输入群体集成模块估计未来轨迹预测的概率分布。
一种车辆运动轨迹连续跟踪方法.pdf
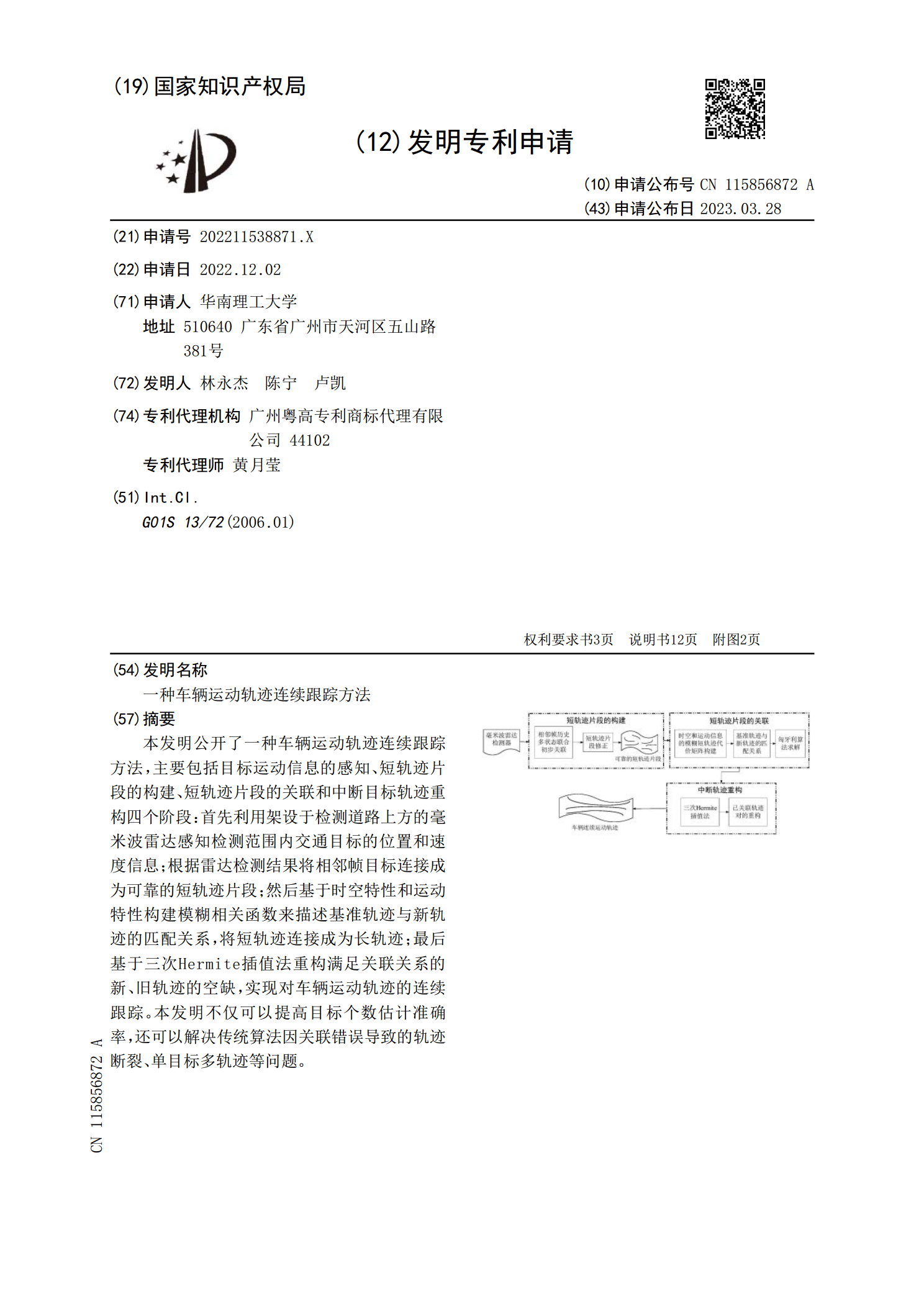
本发明公开了一种车辆运动轨迹连续跟踪方法,主要包括目标运动信息的感知、短轨迹片段的构建、短轨迹片段的关联和中断目标轨迹重构四个阶段:首先利用架设于检测道路上方的毫米波雷达感知检测范围内交通目标的位置和速度信息;根据雷达检测结果将相邻帧目标连接成为可靠的短轨迹片段;然后基于时空特性和运动特性构建模糊相关函数来描述基准轨迹与新轨迹的匹配关系,将短轨迹连接成为长轨迹;最后基于三次Hermite插值法重构满足关联关系的新、旧轨迹的空缺,实现对车辆运动轨迹的连续跟踪。本发明不仅可以提高目标个数估计准确率,还可以解决

一种智慧社区车辆轨迹跟踪方法.pdf
本发明公开了一种智慧社区车辆轨迹跟踪方法,通过Vibe+算法对对进入小区内的车辆进行位置跟踪,并获取车辆移动物体在Vibe+算法处理后的二值图中的白色区域的最小外接矩阵的中心点作为车辆的中心,当车辆停在某地不动时,则该车辆在摄像头下的Vibe+处理后的二值图中白色区域逐渐消失,当白色区域面积小于初始车辆进入小区移动过程的最大面积的80%,则将该车重心点标记为该车此刻停留的坐标位置,从而对车辆进行跟踪。本发明的一种智慧社区车辆轨迹跟踪方法可以将小区内的车辆移动情况和车位占用情况,数字化处理,及时跟踪和处理。