
一种浇注机器人.pdf

是笛****加盟


1/5

2/5

3/5

4/5

5/5
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种浇注机器人.pdf
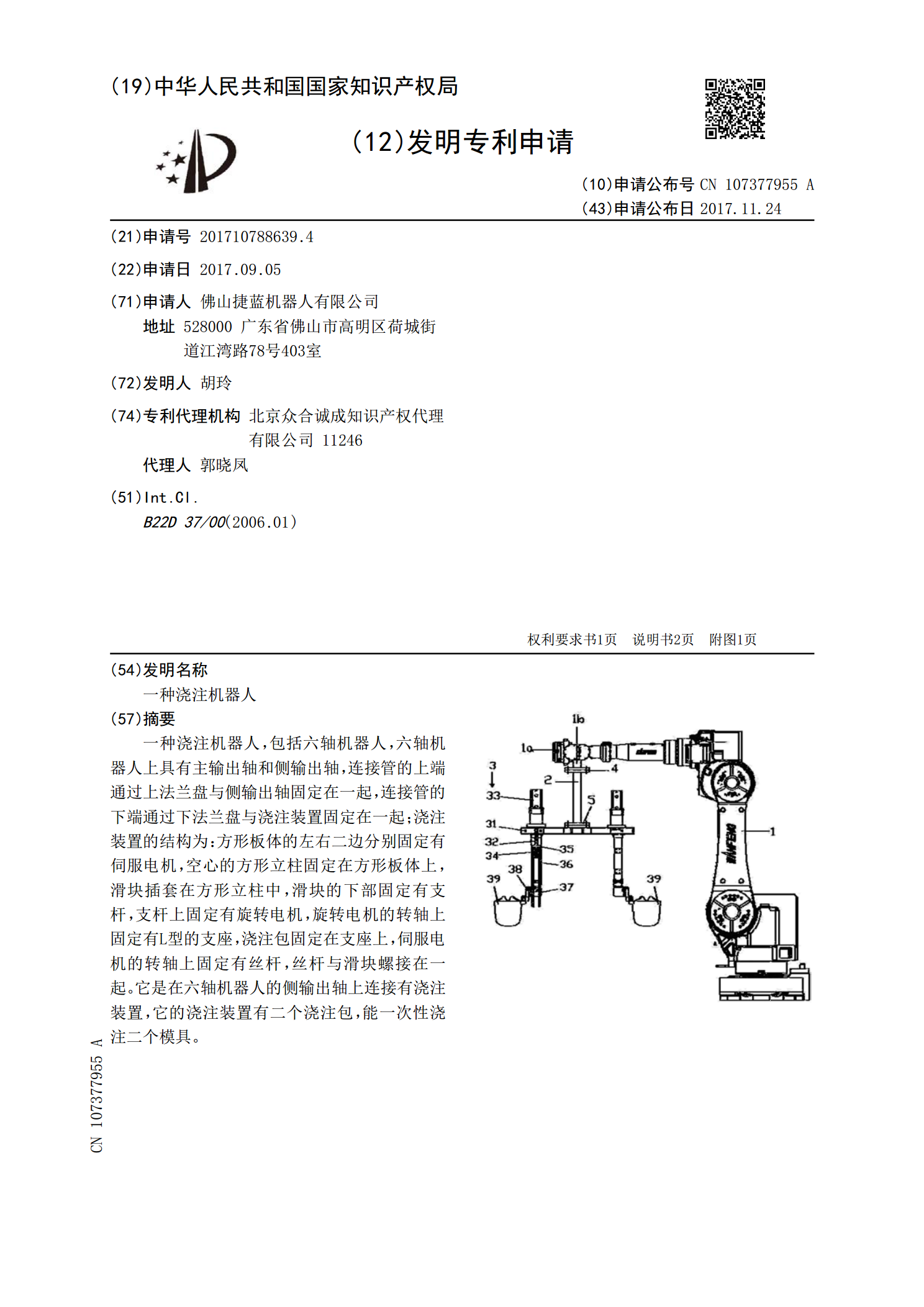
一种浇注机器人,包括六轴机器人,六轴机器人上具有主输出轴和侧输出轴,连接管的上端通过上法兰盘与侧输出轴固定在一起,连接管的下端通过下法兰盘与浇注装置固定在一起;浇注装置的结构为:方形板体的左右二边分别固定有伺服电机,空心的方形立柱固定在方形板体上,滑块插套在方形立柱中,滑块的下部固定有支杆,支杆上固定有旋转电机,旋转电机的转轴上固定有L型的支座,浇注包固定在支座上,伺服电机的转轴上固定有丝杆,丝杆与滑块螺接在一起。它是在六轴机器人的侧输出轴上连接有浇注装置,它的浇注装置有二个浇注包,能一次性浇注二个模具。

一种机器人追踪浇注装置.pdf
本发明涉及一种浇注领域,尤其涉及一种机器人追踪浇注装置。包括:一相机,设置在机器人的末端,用于获取浇注口的轮廓信息并发送至机器人;脉冲编码器,设置在所述模具上,用于实时获取所述模具转动过程中的脉冲信息并发送至所述机器人;多个发泡剂存储箱,设置在转台的上方,用于存储不同的发泡剂;一发泡枪,与发泡剂存储箱连接,设置在机器人末端,用于将发泡剂以一预设流速注入模具。上述技术方案的有益效果是:能够在不停止转台的状态下准确高效完成整个浇注成型过程,且能满足模架倾斜不同角度。

一种新型并联浇注机器人.pdf
本发明提供一种新型并联浇注机器人,包括基座、旋转副、转盘、机体和浇包;所述横臂穿入摆动滑块并与摆动滑块滑动配合连接,横臂的一端与浇包连接,其另一端通过缠绕于滑轮组的配重柔索与配重固接;第一卷筒和第二卷筒设置于机体内部,并通过上柔索、下柔索与横臂铰链式连接;机身采用并联运动机构,实现高刚度、重载荷;浇包通过设于横臂内的平行四边形四杆机构与浇包摆动电机相连。可水平方向回转的机身通过转盘和旋转副与电机连接,根据浇铸机的要求采用容积法,保证每次取液的准确性;浇包摆动电机驱动一套平行四边形四杆机构实现浇包角度在‑4

一种铝活塞高精度浇注机器人.pdf
本发明属于铝活塞毛坯浇注技术领域,特别涉及一种铝活塞高精度浇注机器人,包括ABB六轴工业机器人和浇注第七轴,浇注第七轴通过机器人连接法兰与ABB六轴工业机器人的连接端固定连接,其特征在于:浇注第七轴包括第七轴电机、第七轴减速机、传动杆、直角齿轮箱和浇勺,第七轴电机下方连接第七轴减速机,第七轴减速机通过轴承、减速机联轴器与传动杆连接,传动杆的下端与直角齿轮箱通过轴承、齿轮箱联轴器连接,直角齿轮箱输出轴通过浇勺连接板与浇勺连接;所述的传动杆外侧还设置有保护和连接上下机构作用的传动杆外壳。本发明的有益效果是,多

自动浇注机器人.pdf
自动浇注机器人,涉及自动浇注设备技术领域。包括动力装置、传动装置、舀取装置和检测装置,所述的动力装置包括伺服电机、减速器和联轴器,所述的传动装置包括传动轴、锥齿轮和从动锥齿轮,所述的舀取装置包括齿轮轴和舀勺,所述的检测装置包括压板、石墨棒和不锈钢棒。采用伺服电机提供动力,通过传动轴和齿轮进行传动,具有较好的平稳性,同时能够实现的舀勺旋转速度和角度的精准控制,从而减少了铝液浪费;由压板、不锈钢棒及石墨棒组成的铝液液位检测探针,具有确定铝液表层位置的功能,使用石墨棒接触铝液,可以避免铝液与探针的粘连,从而保证