
自动浇注机器人.pdf

邻家****文章


1/5

2/5

3/5

4/5

5/5
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

自动浇注机器人.pdf
自动浇注机器人,涉及自动浇注设备技术领域。包括动力装置、传动装置、舀取装置和检测装置,所述的动力装置包括伺服电机、减速器和联轴器,所述的传动装置包括传动轴、锥齿轮和从动锥齿轮,所述的舀取装置包括齿轮轴和舀勺,所述的检测装置包括压板、石墨棒和不锈钢棒。采用伺服电机提供动力,通过传动轴和齿轮进行传动,具有较好的平稳性,同时能够实现的舀勺旋转速度和角度的精准控制,从而减少了铝液浪费;由压板、不锈钢棒及石墨棒组成的铝液液位检测探针,具有确定铝液表层位置的功能,使用石墨棒接触铝液,可以避免铝液与探针的粘连,从而保证

机器人在重力浇注自动化中的应用.docx
机器人在重力浇注自动化中的应用随着科技的发展和工艺的进步,机器人技术在重力浇注自动化中的应用越来越广泛。重力浇注技术是一种将熔融状态的金属或合金倒入铸型中的铸造方法,是现代工业生产中不可或缺的一环。而机器人的应用则为重力浇注自动化注入了新的生命力,为企业提供了高效、精准、可靠的生产手段,优化了生产效率和生产效益。一、机器人在重力浇注自动化中的应用机器人在重力浇注自动化中的应用主要包括以下几个方面:1、浇注操作机器人可以代替人工进行铸铁、铸钢、铸铜等各种金属熔炼及铸造工作。利用机器人来完成这一工作,精度就能
自动浇注方法.pdf
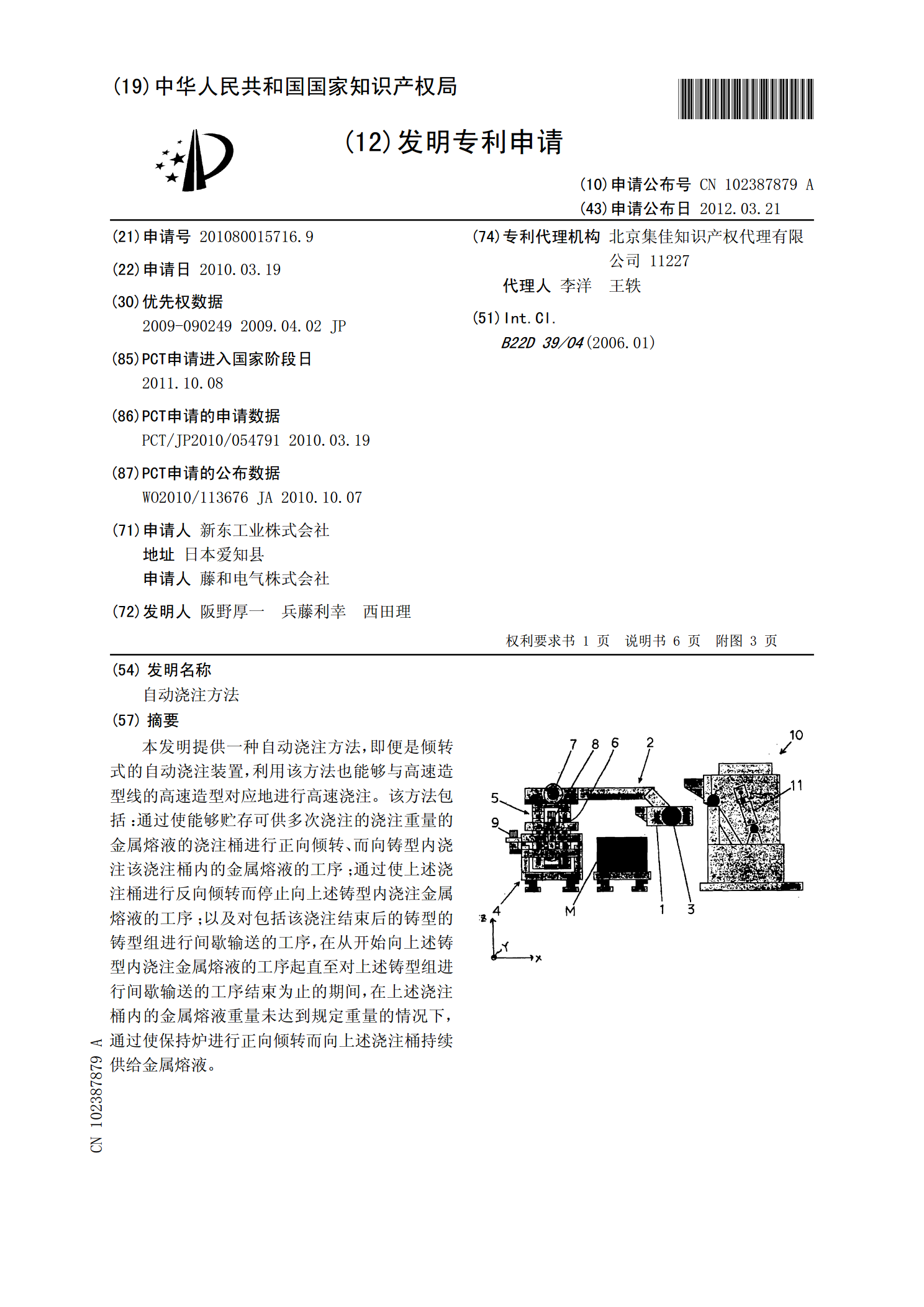
本发明提供一种自动浇注方法,即便是倾转式的自动浇注装置,利用该方法也能够与高速造型线的高速造型对应地进行高速浇注。该方法包括:通过使能够贮存可供多次浇注的浇注重量的金属熔液的浇注桶进行正向倾转、而向铸型内浇注该浇注桶内的金属熔液的工序;通过使上述浇注桶进行反向倾转而停止向上述铸型内浇注金属熔液的工序;以及对包括该浇注结束后的铸型的铸型组进行间歇输送的工序,在从开始向上述铸型内浇注金属熔液的工序起直至对上述铸型组进行间歇输送的工序结束为止的期间,在上述浇注桶内的金属熔液重量未达到规定重量的情况下,通过使保持

自动浇注的研究.docx
自动浇注的研究自动浇注的研究摘要:自动浇注技术是一种通过自动化和智能化的方式对液体或半固体物体进行精确浇注的技术。本论文主要介绍了自动浇注技术的定义、发展历程、应用领域以及未来的发展方向。我们通过对自动浇注技术的研究和应用实例进行分析,发现自动浇注技术在提高生产效率、降低人力成本、保证产品质量等方面具有显著的优势。然而,目前自动浇注技术仍面临着许多挑战,包括技术难题、设备成本、标准和法规等方面的限制。因此,未来的研究方向应包括对自动浇注技术的改进和创新,以提高其可靠性、精确性和适应性。关键词:自动浇注技术
高炉出铁沟自动浇注工艺及浇注设备.pdf
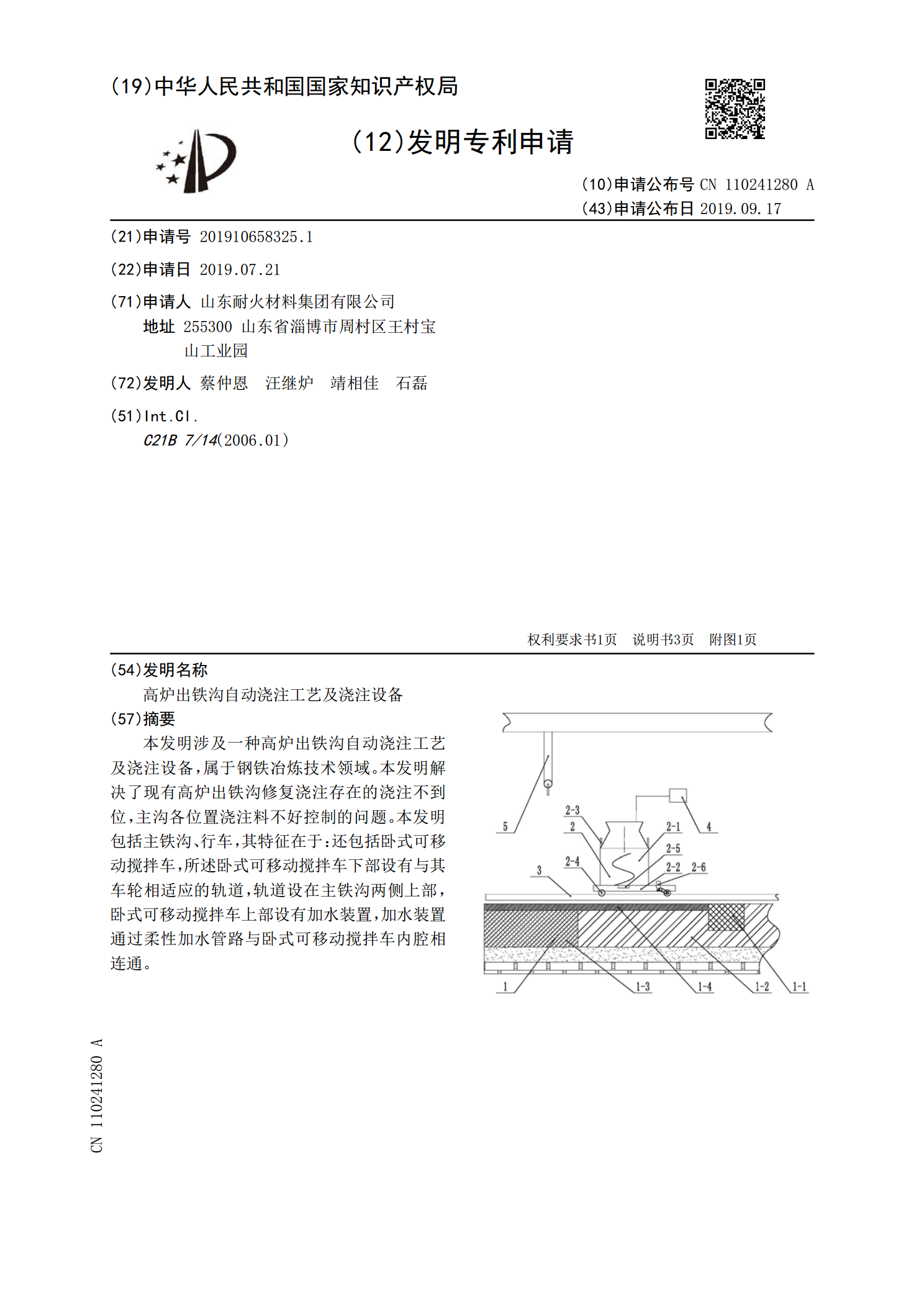
本发明涉及一种高炉出铁沟自动浇注工艺及浇注设备,属于钢铁冶炼技术领域。本发明解决了现有高炉出铁沟修复浇注存在的浇注不到位,主沟各位置浇注料不好控制的问题。本发明包括主铁沟、行车,其特征在于:还包括卧式可移动搅拌车,所述卧式可移动搅拌车下部设有与其车轮相适应的轨道,轨道设在主铁沟两侧上部,卧式可移动搅拌车上部设有加水装置,加水装置通过柔性加水管路与卧式可移动搅拌车内腔相连通。