
一种新型并联浇注机器人.pdf

是你****嘉嘉


1/6

2/6

3/6

4/6

5/6

6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种新型并联浇注机器人.pdf
本发明提供一种新型并联浇注机器人,包括基座、旋转副、转盘、机体和浇包;所述横臂穿入摆动滑块并与摆动滑块滑动配合连接,横臂的一端与浇包连接,其另一端通过缠绕于滑轮组的配重柔索与配重固接;第一卷筒和第二卷筒设置于机体内部,并通过上柔索、下柔索与横臂铰链式连接;机身采用并联运动机构,实现高刚度、重载荷;浇包通过设于横臂内的平行四边形四杆机构与浇包摆动电机相连。可水平方向回转的机身通过转盘和旋转副与电机连接,根据浇铸机的要求采用容积法,保证每次取液的准确性;浇包摆动电机驱动一套平行四边形四杆机构实现浇包角度在‑4

一种新型并联机器人工作空间分析.docx
一种新型并联机器人工作空间分析随着工业自动化技术的不断发展,工业机器人逐渐成为工业生产过程中的一种重要设备。机器人在自动化生产过程中扮演着重要的角色,能够取代人力完成一些重复、繁琐、危险等作业,大大提高了生产效率和产品质量。而机器人空间分析是机器人工作可行性研究的一个重要方面。本文将介绍一种新型并联机器人,并对其工作空间进行分析。一、新型并联机器人的简介新型并联机器人是由多个运动自由度的杆件和关节组成的机器人。该机器人适用于需要大范围运动和高精度姿态的应用场景。新型并联机器人的主要优点是在工作空间内保持了
一种浇注机器人.pdf
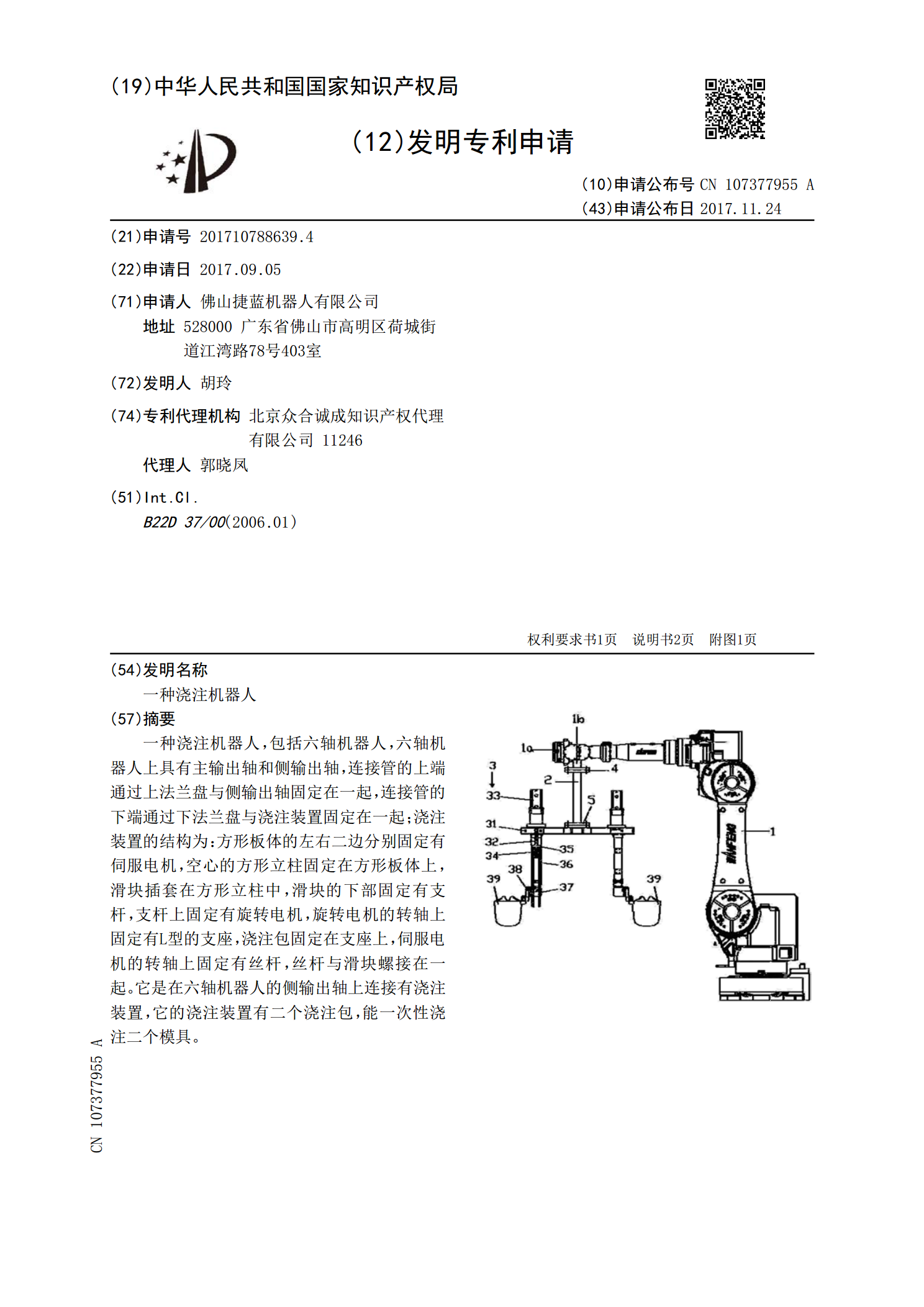
一种浇注机器人,包括六轴机器人,六轴机器人上具有主输出轴和侧输出轴,连接管的上端通过上法兰盘与侧输出轴固定在一起,连接管的下端通过下法兰盘与浇注装置固定在一起;浇注装置的结构为:方形板体的左右二边分别固定有伺服电机,空心的方形立柱固定在方形板体上,滑块插套在方形立柱中,滑块的下部固定有支杆,支杆上固定有旋转电机,旋转电机的转轴上固定有L型的支座,浇注包固定在支座上,伺服电机的转轴上固定有丝杆,丝杆与滑块螺接在一起。它是在六轴机器人的侧输出轴上连接有浇注装置,它的浇注装置有二个浇注包,能一次性浇注二个模具。

一种新型并联微动机器人运动学分析.docx
一种新型并联微动机器人运动学分析标题:新型并联微动机器人的运动学分析摘要:本文主要针对一种新型的并联微动机器人进行运动学分析。该微动机器人由多个微型执行器组成,并通过并联结构与基座相连。首先,我们介绍了微动机器人的工作原理和结构设计。然后,基于平面运动假设,推导出其运动学模型。最后,通过数值仿真和实验验证,验证了所提出的运动学模型的有效性。1.引言随着微纳技术的发展,微型机器人在生物医学、工业制造和环境监测等领域展示了巨大的应用潜力。与传统机器人相比,微动机器人由于其小尺寸和高灵活性,更适合在微小环境下进
新型串并联中医推拿机器人研究.pdf
新型串并联中医推拿机器人研究——余顺年马履中陈扼西等