
一种智能机器人抓取结构.pdf

努力****甲寅

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种智能机器人抓取结构.pdf
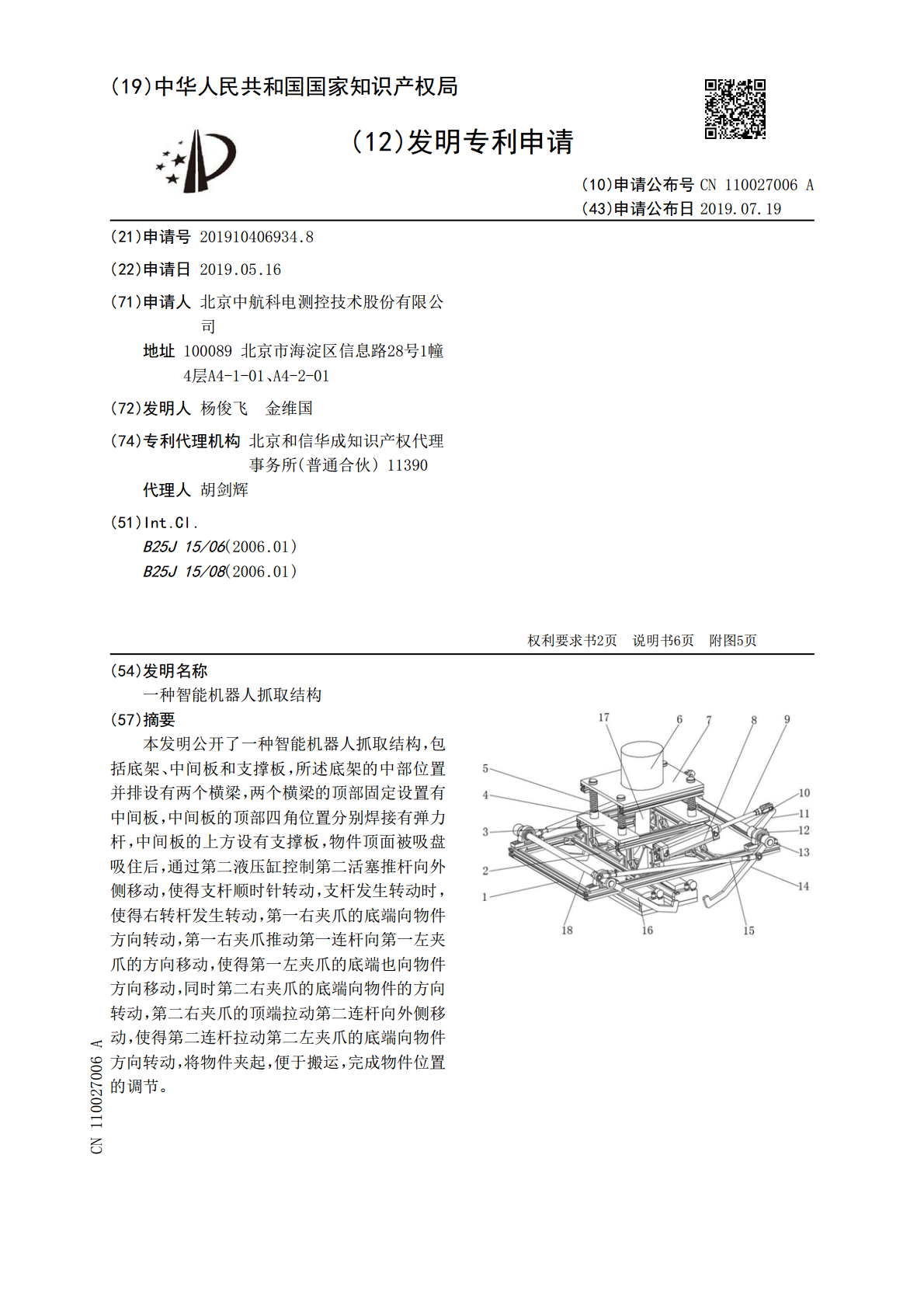
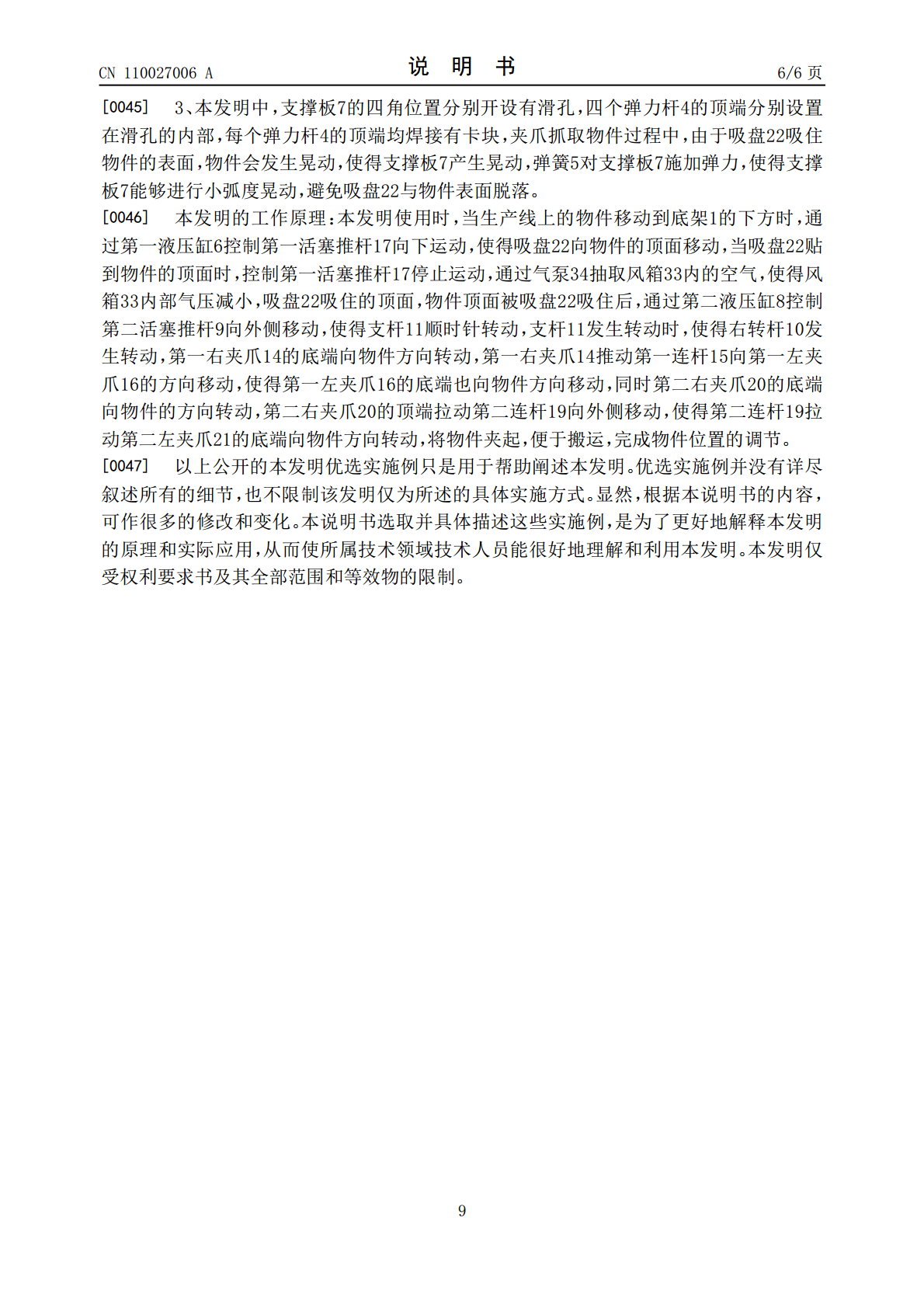
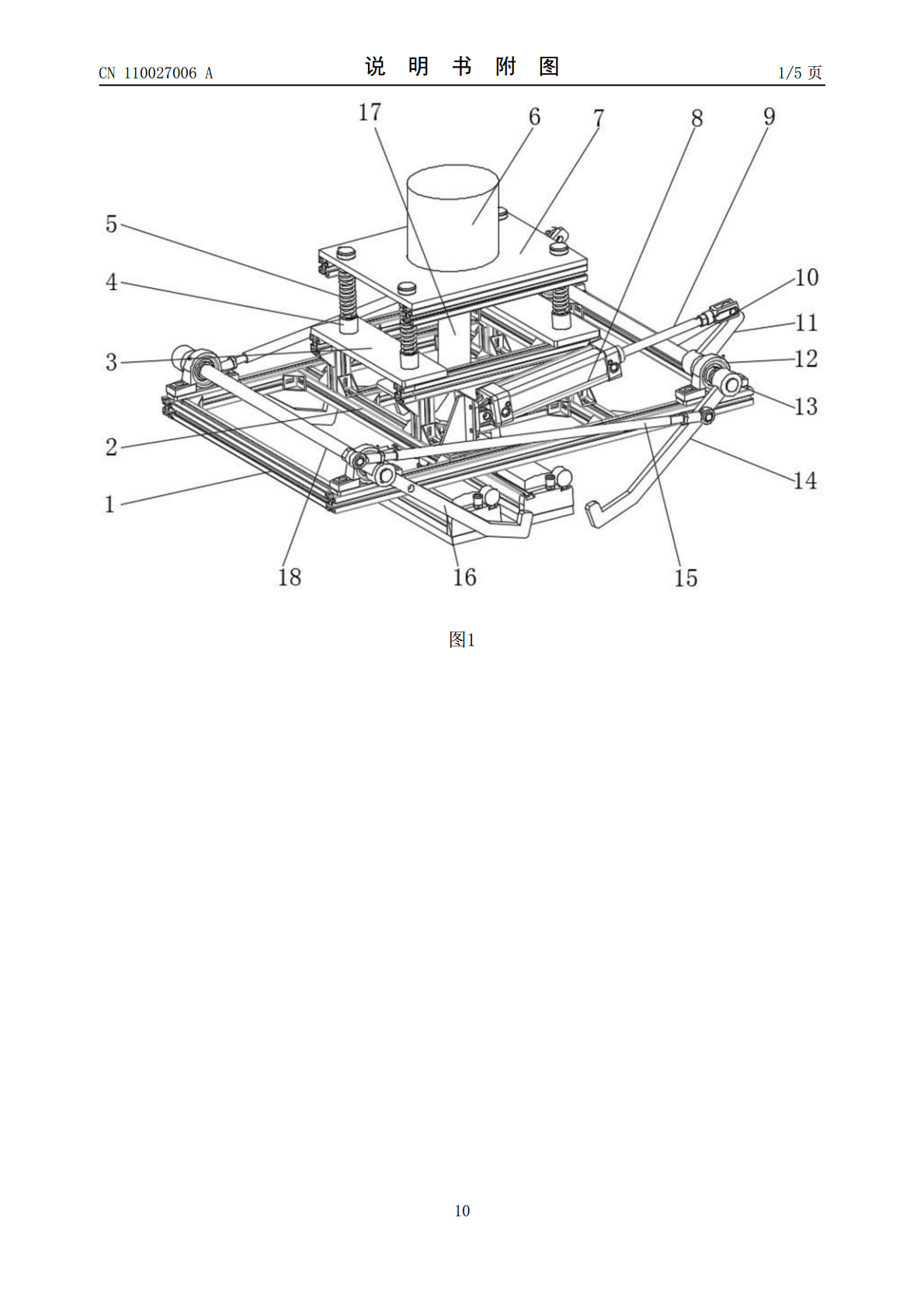
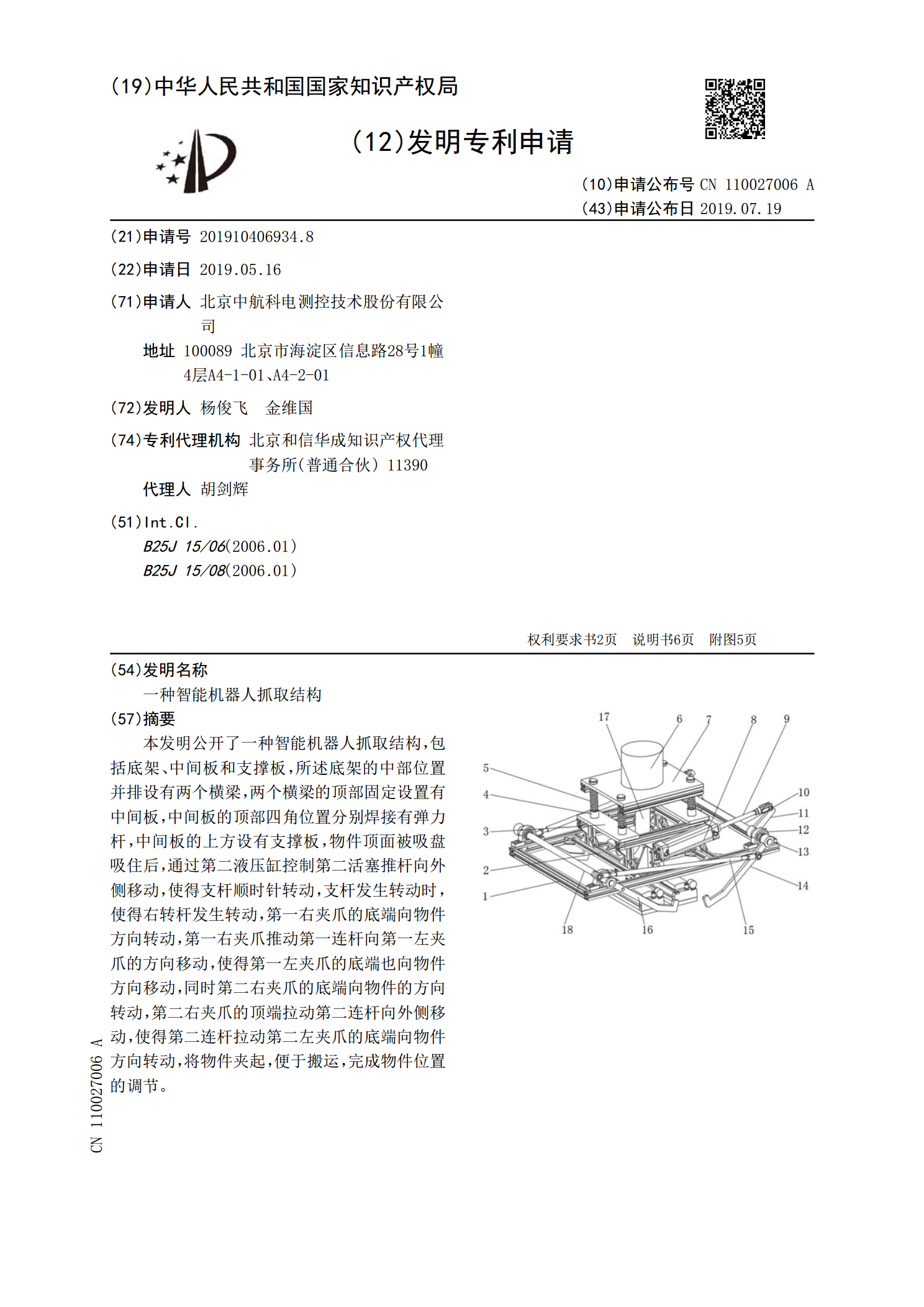
本发明公开了一种智能机器人抓取结构,包括底架、中间板和支撑板,所述底架的中部位置并排设有两个横梁,两个横梁的顶部固定设置有中间板,中间板的顶部四角位置分别焊接有弹力杆,中间板的上方设有支撑板,物件顶面被吸盘吸住后,通过第二液压缸控制第二活塞推杆向外侧移动,使得支杆顺时针转动,支杆发生转动时,使得右转杆发生转动,第一右夹爪的底端向物件方向转动,第一右夹爪推动第一连杆向第一左夹爪的方向移动,使得第一左夹爪的底端也向物件方向移动,同时第二右夹爪的底端向物件的方向转动,第二右夹爪的顶端拉动第二连杆向外侧移动,使得
一种智能抓取机器人.pdf
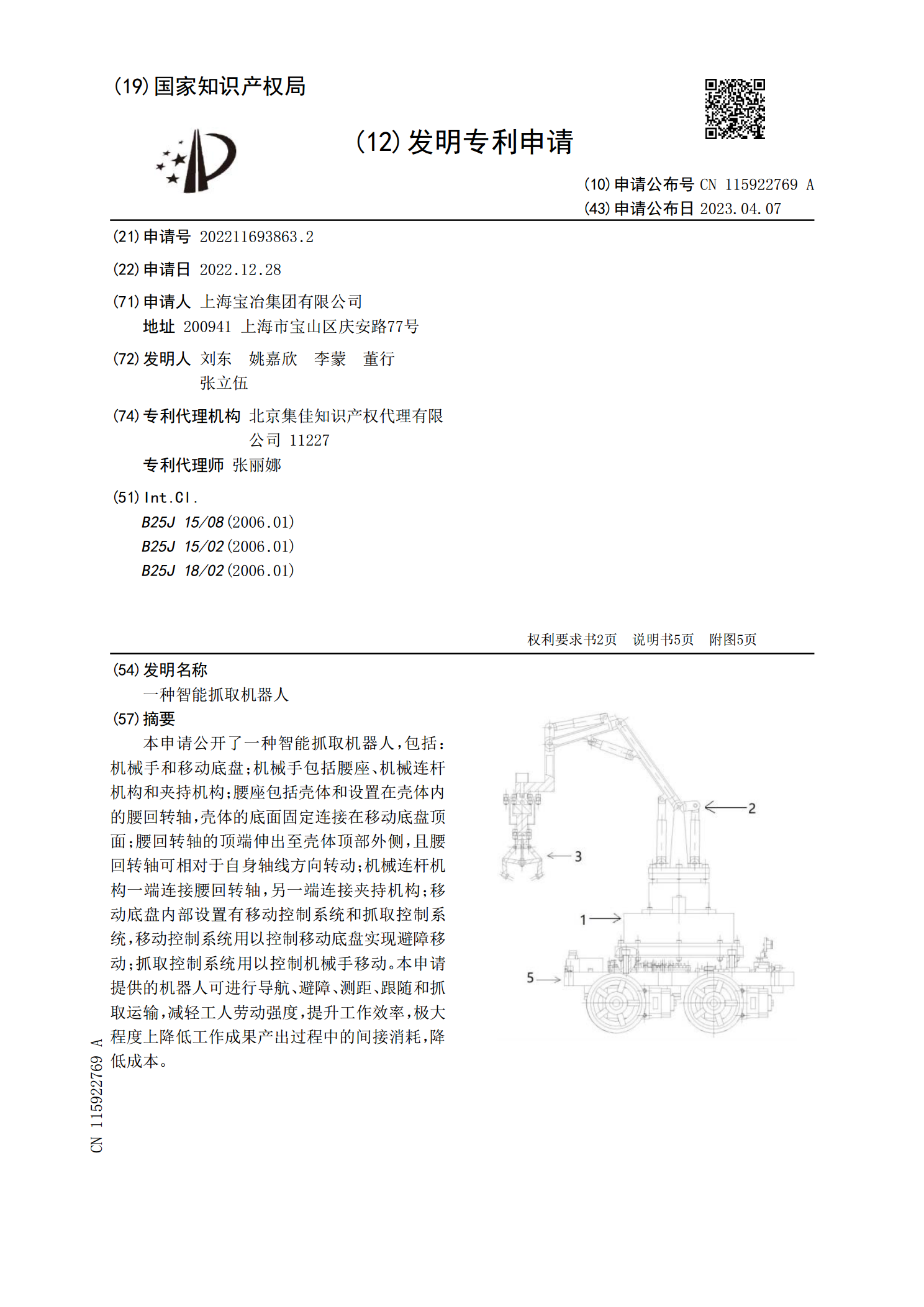
本申请公开了一种智能抓取机器人,包括:机械手和移动底盘;机械手包括腰座、机械连杆机构和夹持机构;腰座包括壳体和设置在壳体内的腰回转轴,壳体的底面固定连接在移动底盘顶面;腰回转轴的顶端伸出至壳体顶部外侧,且腰回转轴可相对于自身轴线方向转动;机械连杆机构一端连接腰回转轴,另一端连接夹持机构;移动底盘内部设置有移动控制系统和抓取控制系统,移动控制系统用以控制移动底盘实现避障移动;抓取控制系统用以控制机械手移动。本申请提供的机器人可进行导航、避障、测距、跟随和抓取运输,减轻工人劳动强度,提升工作效率,极大程度上降
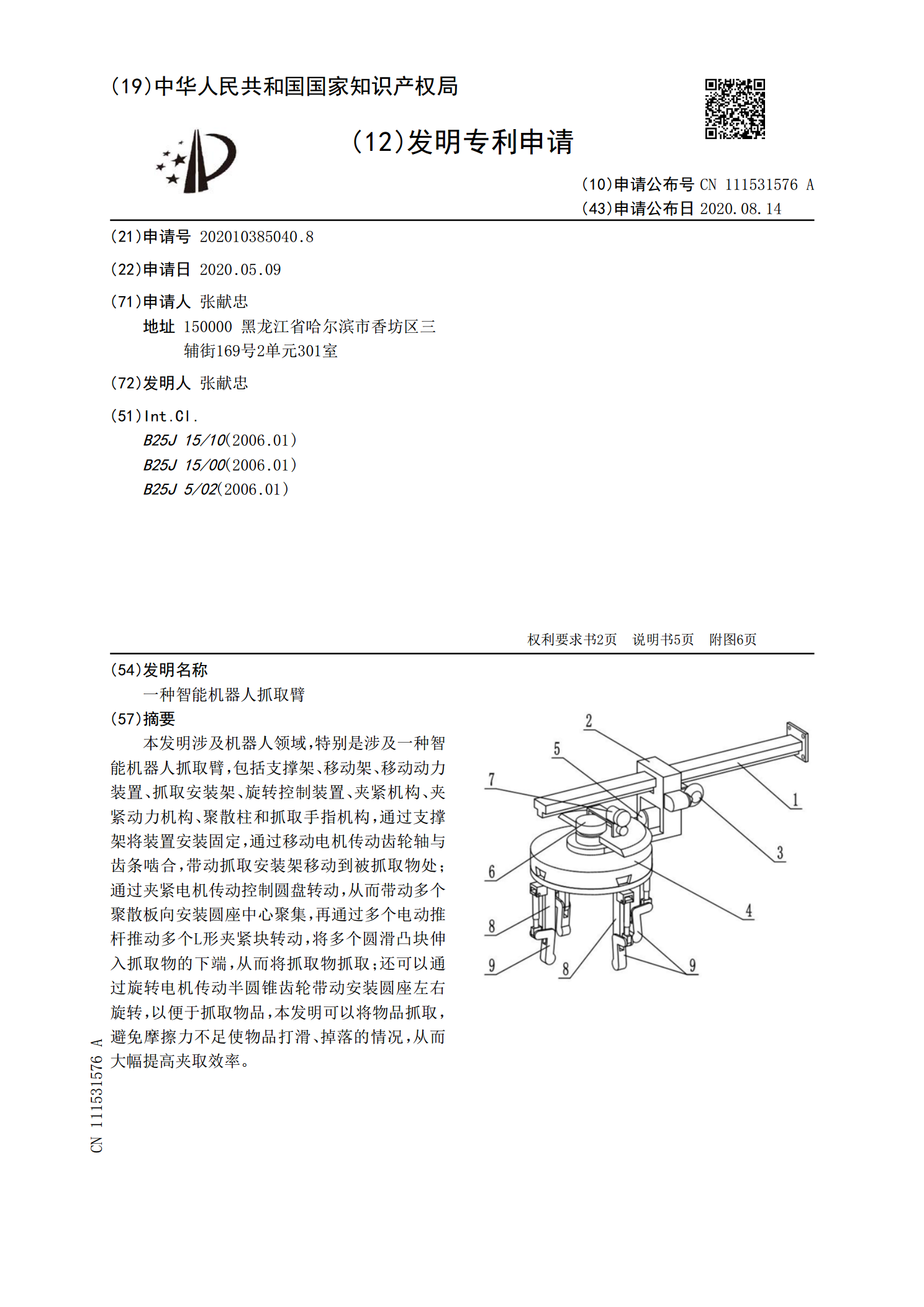
一种智能机器人抓取臂.pdf
本发明涉及机器人领域,特别是涉及一种智能机器人抓取臂,包括支撑架、移动架、移动动力装置、抓取安装架、旋转控制装置、夹紧机构、夹紧动力机构、聚散柱和抓取手指机构,通过支撑架将装置安装固定,通过移动电机传动齿轮轴与齿条啮合,带动抓取安装架移动到被抓取物处;通过夹紧电机传动控制圆盘转动,从而带动多个聚散板向安装圆座中心聚集,再通过多个电动推杆推动多个L形夹紧块转动,将多个圆滑凸块伸入抓取物的下端,从而将抓取物抓取;还可以通过旋转电机传动半圆锥齿轮带动安装圆座左右旋转,以便于抓取物品,本发明可以将物品抓取,避免摩
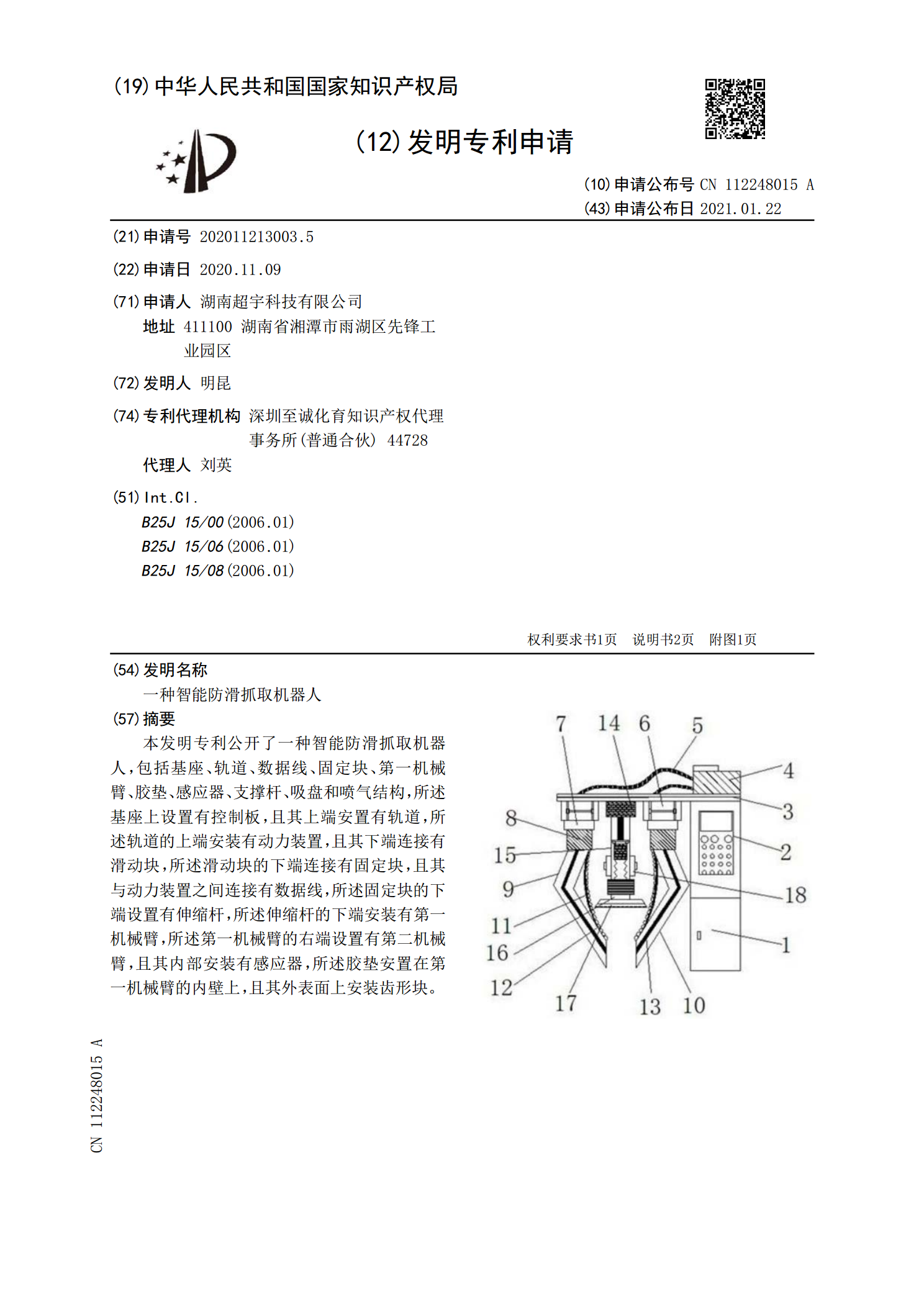
一种智能防滑抓取机器人.pdf
本发明专利公开了一种智能防滑抓取机器人,包括基座、轨道、数据线、固定块、第一机械臂、胶垫、感应器、支撑杆、吸盘和喷气结构,所述基座上设置有控制板,且其上端安置有轨道,所述轨道的上端安装有动力装置,且其下端连接有滑动块,所述滑动块的下端连接有固定块,且其与动力装置之间连接有数据线,所述固定块的下端设置有伸缩杆,所述伸缩杆的下端安装有第一机械臂,所述第一机械臂的右端设置有第二机械臂,且其内部安装有感应器,所述胶垫安置在第一机械臂的内壁上,且其外表面上安装齿形块。
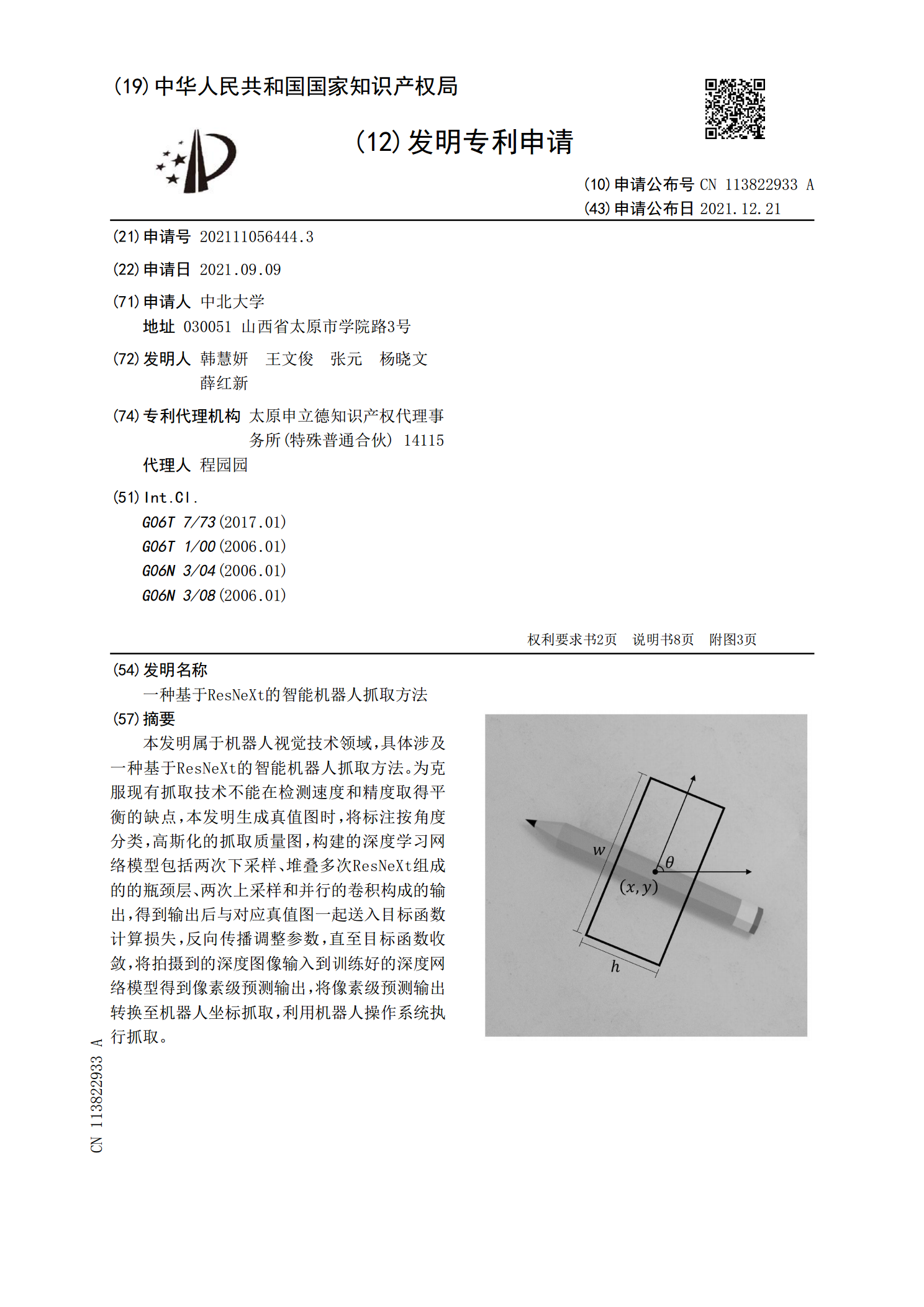
一种基于ResNeXt的智能机器人抓取方法.pdf
本发明属于机器人视觉技术领域,具体涉及一种基于ResNeXt的智能机器人抓取方法。为克服现有抓取技术不能在检测速度和精度取得平衡的缺点,本发明生成真值图时,将标注按角度分类,高斯化的抓取质量图,构建的深度学习网络模型包括两次下采样、堆叠多次ResNeXt组成的的瓶颈层、两次上采样和并行的卷积构成的输出,得到输出后与对应真值图一起送入目标函数计算损失,反向传播调整参数,直至目标函数收敛,将拍摄到的深度图像输入到训练好的深度网络模型得到像素级预测输出,将像素级预测输出转换至机器人坐标抓取,利用机器人操作系统执