
一种基于ResNeXt的智能机器人抓取方法.pdf

一吃****海逸

1/10

2/10
3/10
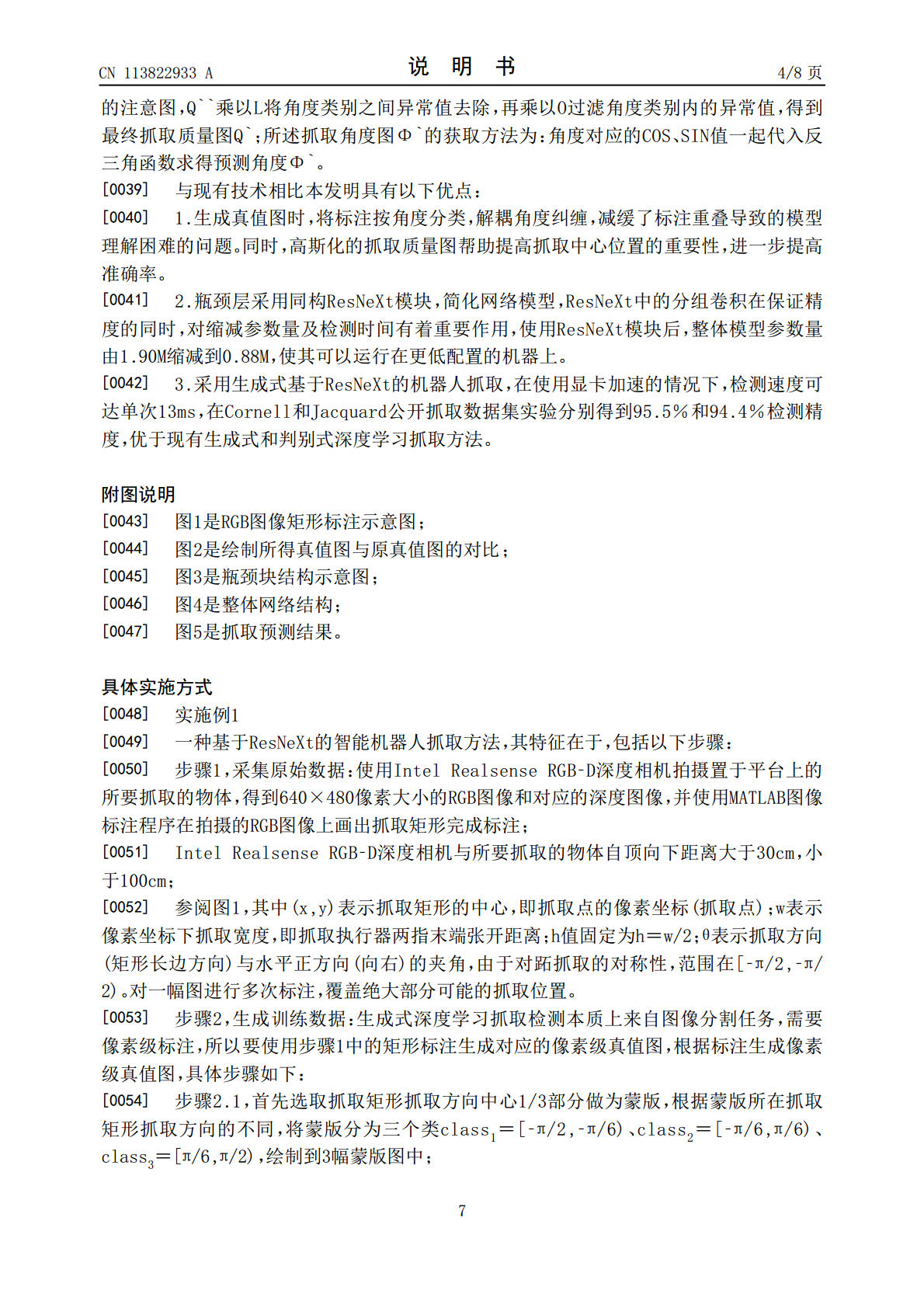
4/10

5/10
6/10
7/10

8/10
9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于ResNeXt的智能机器人抓取方法.pdf
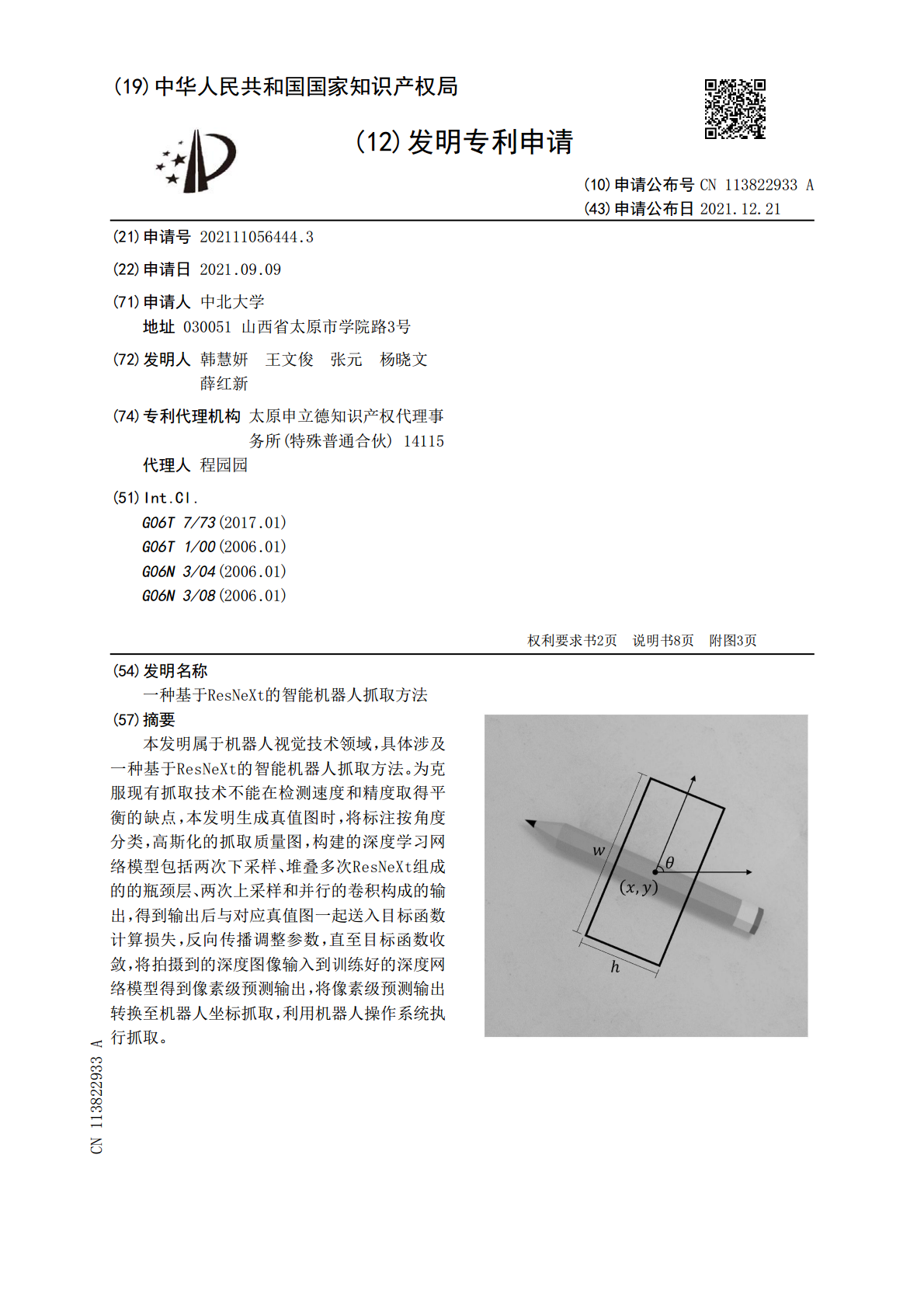
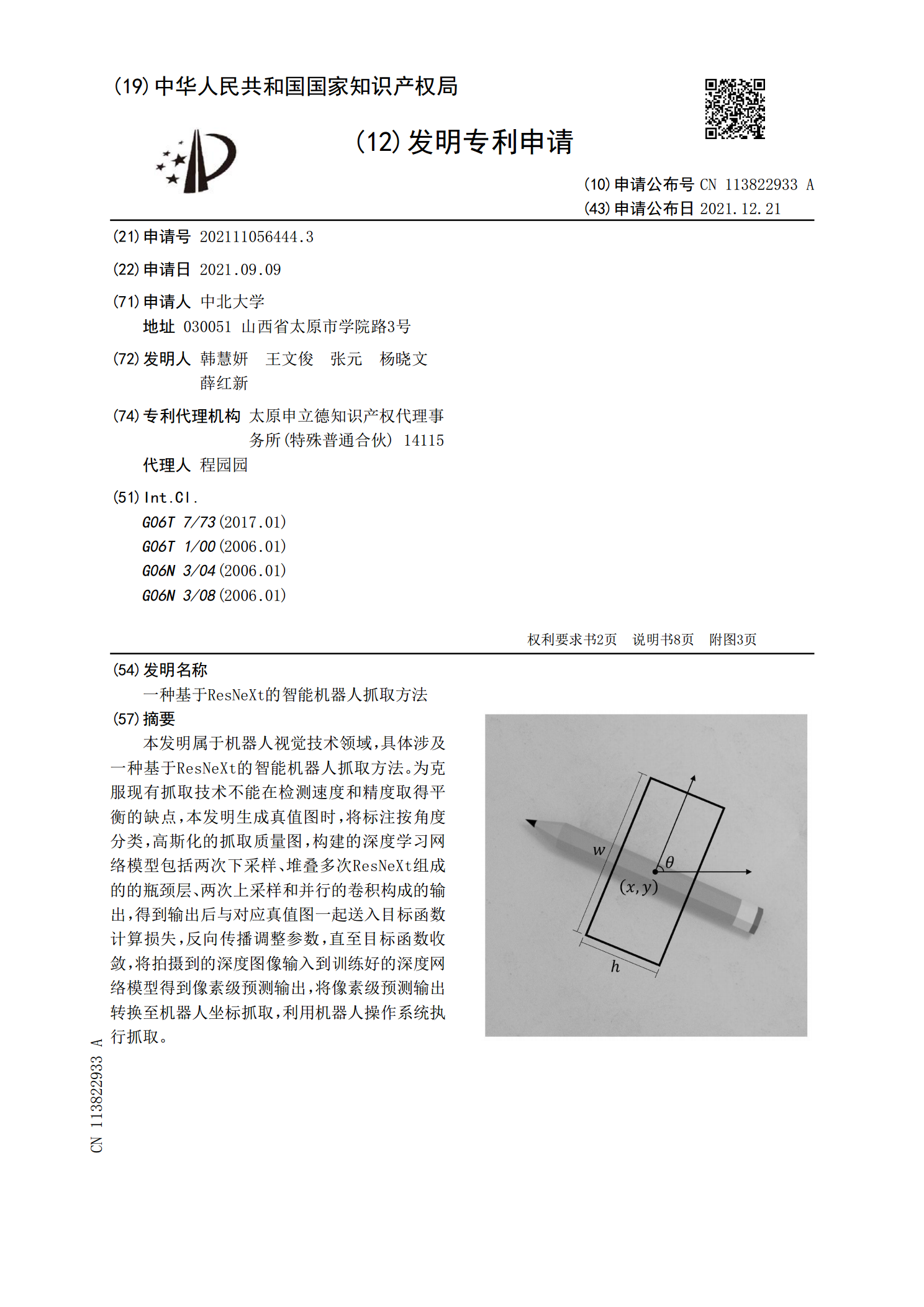
本发明属于机器人视觉技术领域,具体涉及一种基于ResNeXt的智能机器人抓取方法。为克服现有抓取技术不能在检测速度和精度取得平衡的缺点,本发明生成真值图时,将标注按角度分类,高斯化的抓取质量图,构建的深度学习网络模型包括两次下采样、堆叠多次ResNeXt组成的的瓶颈层、两次上采样和并行的卷积构成的输出,得到输出后与对应真值图一起送入目标函数计算损失,反向传播调整参数,直至目标函数收敛,将拍摄到的深度图像输入到训练好的深度网络模型得到像素级预测输出,将像素级预测输出转换至机器人坐标抓取,利用机器人操作系统执

基于NAO机器人的智能抓取技术.pptx
基于NAO机器人的智能抓取技术01添加章节标题NAO机器人的基本介绍起源和背景结构和功能应用领域智能抓取技术的原理和特点智能抓取技术的定义技术原理和实现方式智能抓取技术的优势和局限性基于NAO机器人的智能抓取技术方案技术方案的设计思路关键技术和创新点技术方案的实验和验证智能抓取技术的应用场景和案例分析工业自动化领域物流分拣领域家庭服务机器人领域其他应用场景未来发展和挑战技术发展趋势和展望面临的挑战和问题解决方案和建议感谢观看
一种智能抓取机器人.pdf
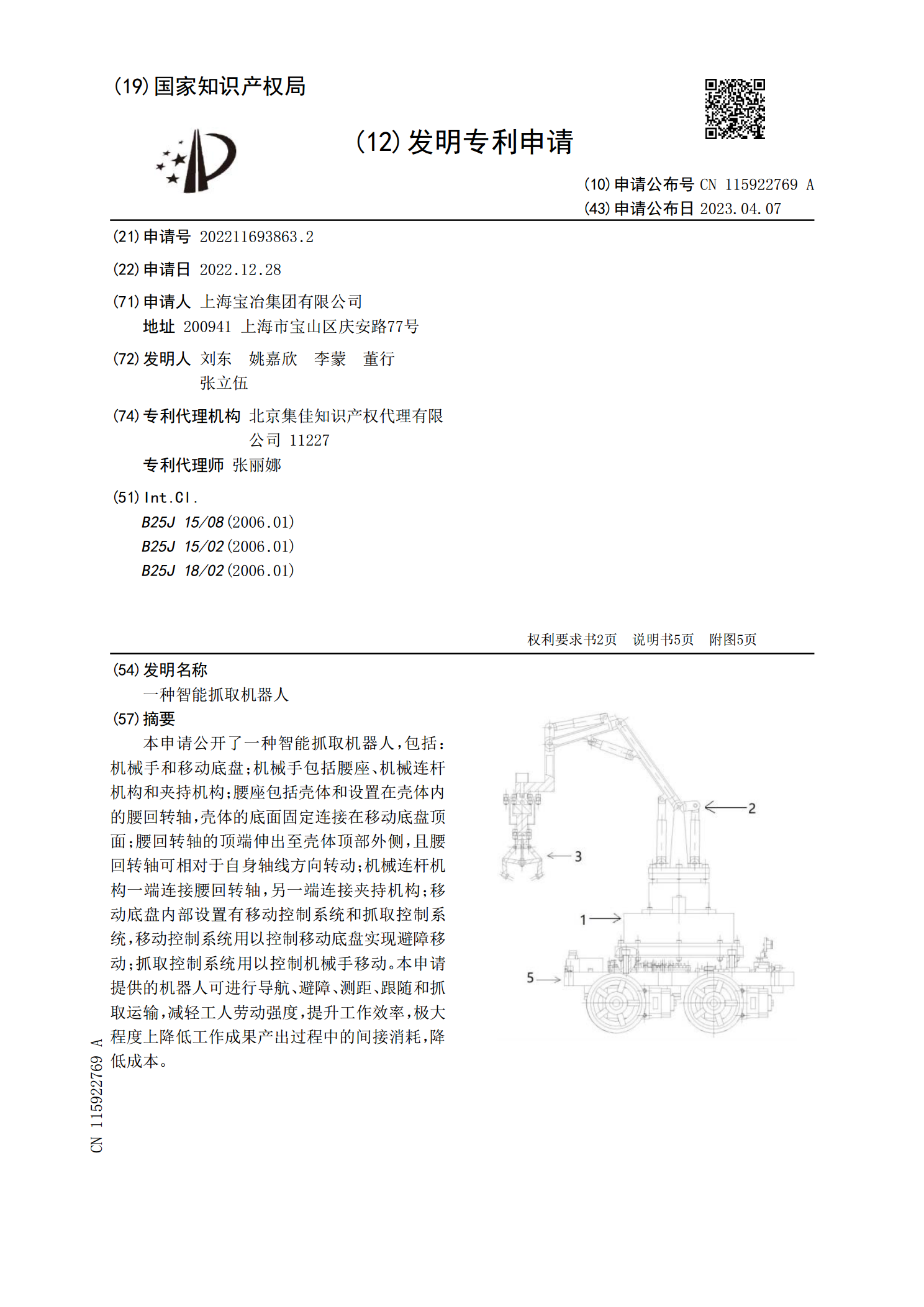
本申请公开了一种智能抓取机器人,包括:机械手和移动底盘;机械手包括腰座、机械连杆机构和夹持机构;腰座包括壳体和设置在壳体内的腰回转轴,壳体的底面固定连接在移动底盘顶面;腰回转轴的顶端伸出至壳体顶部外侧,且腰回转轴可相对于自身轴线方向转动;机械连杆机构一端连接腰回转轴,另一端连接夹持机构;移动底盘内部设置有移动控制系统和抓取控制系统,移动控制系统用以控制移动底盘实现避障移动;抓取控制系统用以控制机械手移动。本申请提供的机器人可进行导航、避障、测距、跟随和抓取运输,减轻工人劳动强度,提升工作效率,极大程度上降

基于工业机器人下的智能工程抓取应用.pptx
基于工业机器人下的智能工程抓取应用目录添加目录项标题工业机器人与智能工程抓取技术概述工业机器人定义与分类智能工程抓取技术概念工业机器人与智能工程抓取技术的关系智能工程抓取技术在工业机器人中的应用场景自动化生产线上的物料搬运装配作业的精准定位与抓取智能仓储物流中的货物分拣与搬运危险环境下的远程操控与作业智能工程抓取技术在工业机器人中的应用优势提高生产效率与降低成本提升作业精度与质量增强工业机器人的智能化水平保障作业安全与人身安全智能工程抓取技术在工业机器人中的未来发展技术创新与突破方向拓展应用领域与市场潜力

基于智能相机的工业机器人引导与抓取.pptx
添加副标题目录PART01PART02智能相机的功能与原理工业机器人的定义与分类工业机器人引导与抓取的意义PART03视觉引导原理引导方法分类引导精度与效率分析引导技术发展趋势PART04抓取技术分类抓取策略制定抓取实施流程抓取技术的优缺点分析PART05智能制造生产线物流分拣系统自动化仓库管理其他应用领域PART06技术瓶颈与难点解决方案与创新点未来发展方向与趋势跨领域合作与协同发展PART07成功应用案例介绍技术实现细节与经验总结实际应用中的问题与解决方案对未来技术发展的启示与展望感谢您的观看