
一种智能防滑抓取机器人.pdf

慧红****ad

1/5

2/5
3/5
4/5
5/5
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种智能防滑抓取机器人.pdf
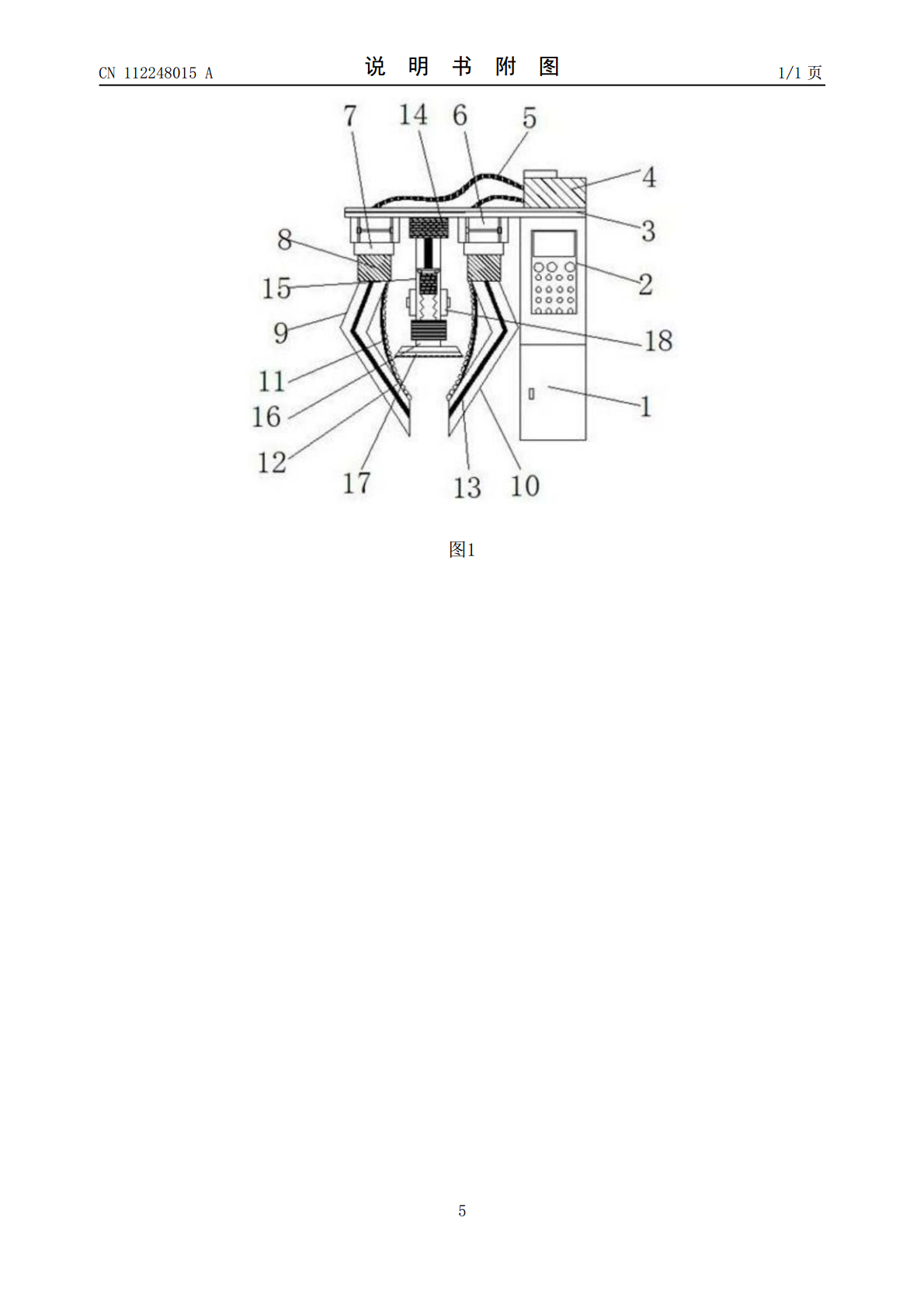
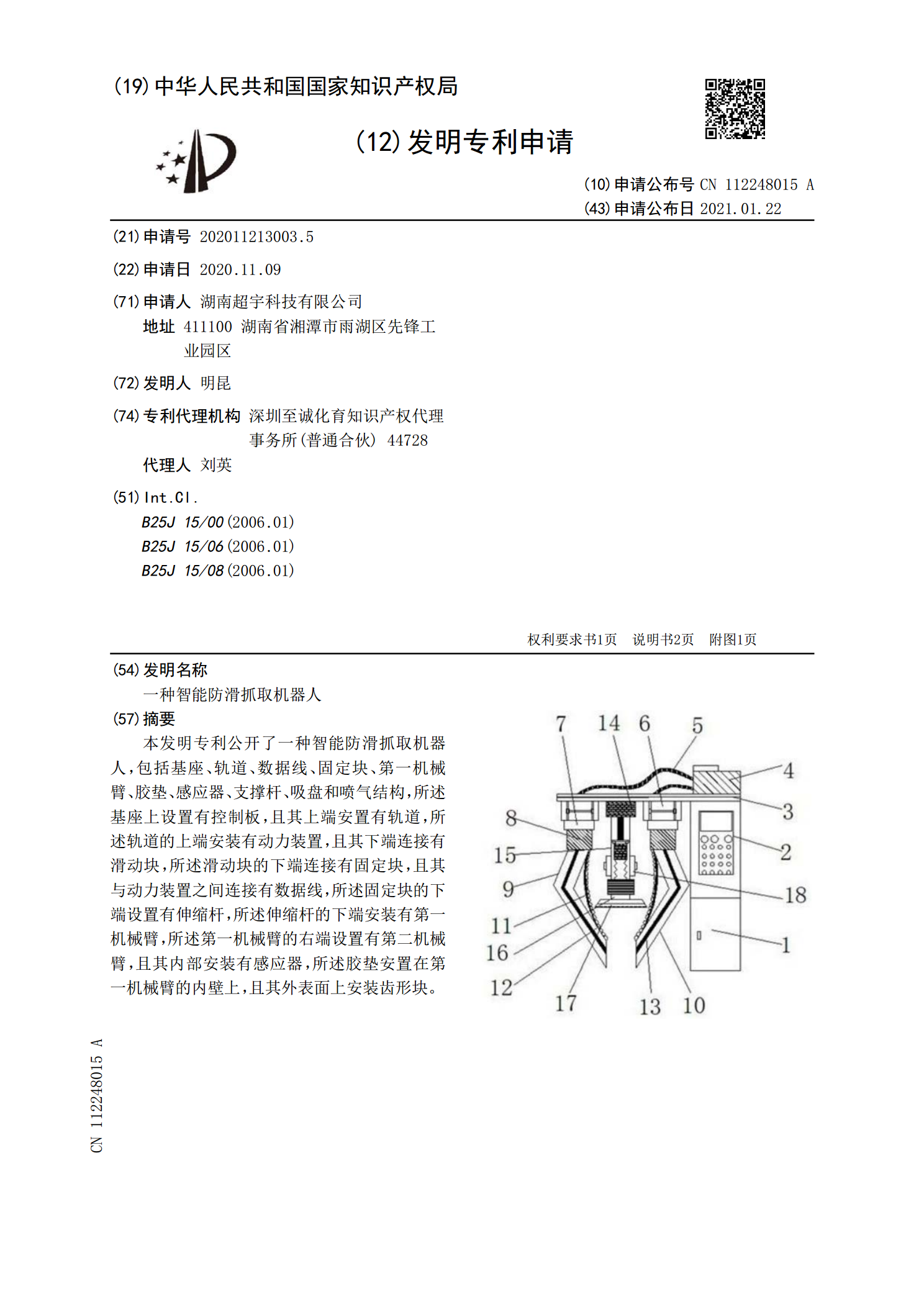
本发明专利公开了一种智能防滑抓取机器人,包括基座、轨道、数据线、固定块、第一机械臂、胶垫、感应器、支撑杆、吸盘和喷气结构,所述基座上设置有控制板,且其上端安置有轨道,所述轨道的上端安装有动力装置,且其下端连接有滑动块,所述滑动块的下端连接有固定块,且其与动力装置之间连接有数据线,所述固定块的下端设置有伸缩杆,所述伸缩杆的下端安装有第一机械臂,所述第一机械臂的右端设置有第二机械臂,且其内部安装有感应器,所述胶垫安置在第一机械臂的内壁上,且其外表面上安装齿形块。
一种智能抓取机器人.pdf
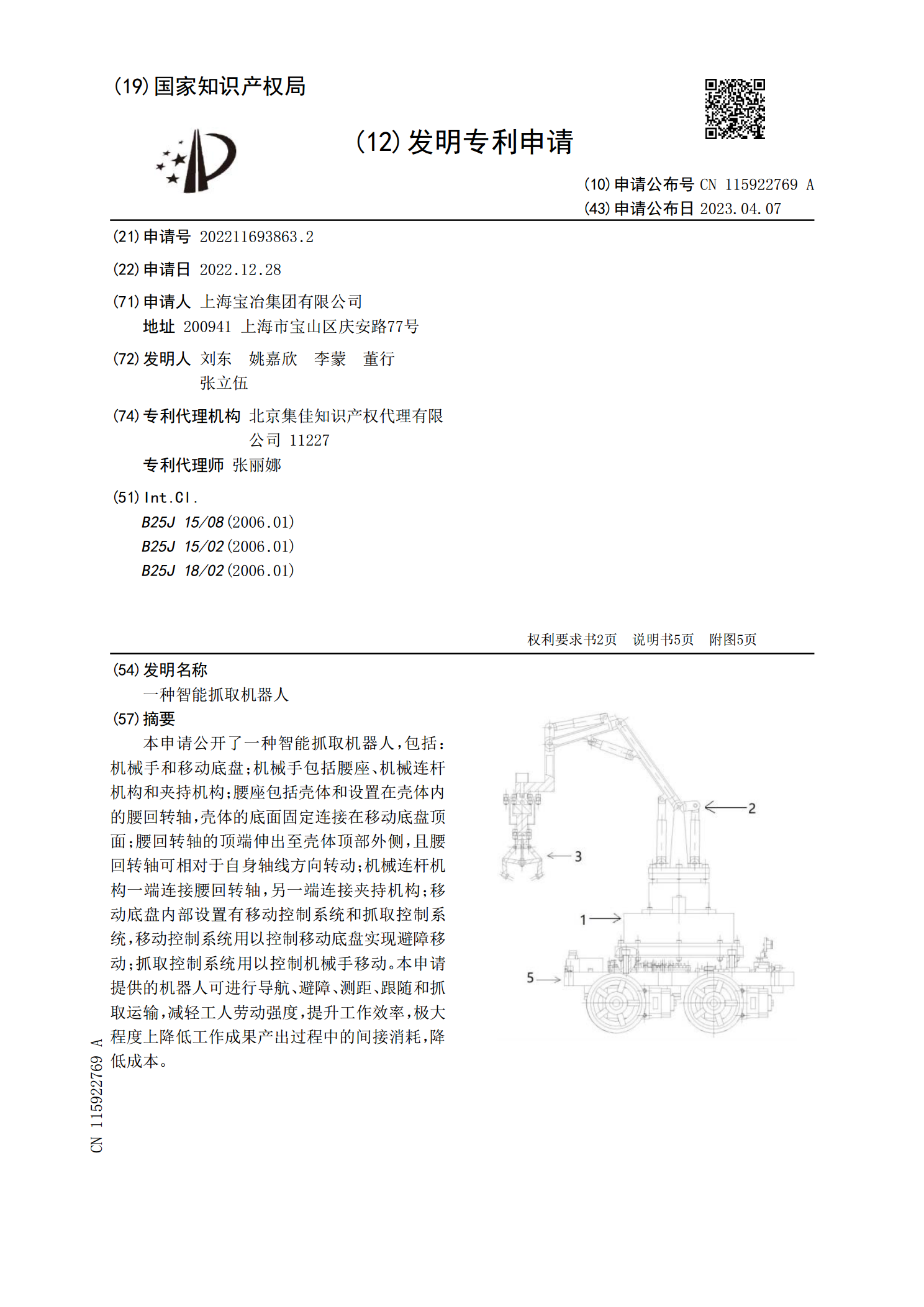
本申请公开了一种智能抓取机器人,包括:机械手和移动底盘;机械手包括腰座、机械连杆机构和夹持机构;腰座包括壳体和设置在壳体内的腰回转轴,壳体的底面固定连接在移动底盘顶面;腰回转轴的顶端伸出至壳体顶部外侧,且腰回转轴可相对于自身轴线方向转动;机械连杆机构一端连接腰回转轴,另一端连接夹持机构;移动底盘内部设置有移动控制系统和抓取控制系统,移动控制系统用以控制移动底盘实现避障移动;抓取控制系统用以控制机械手移动。本申请提供的机器人可进行导航、避障、测距、跟随和抓取运输,减轻工人劳动强度,提升工作效率,极大程度上降
一种智能机器人抓取臂.pdf
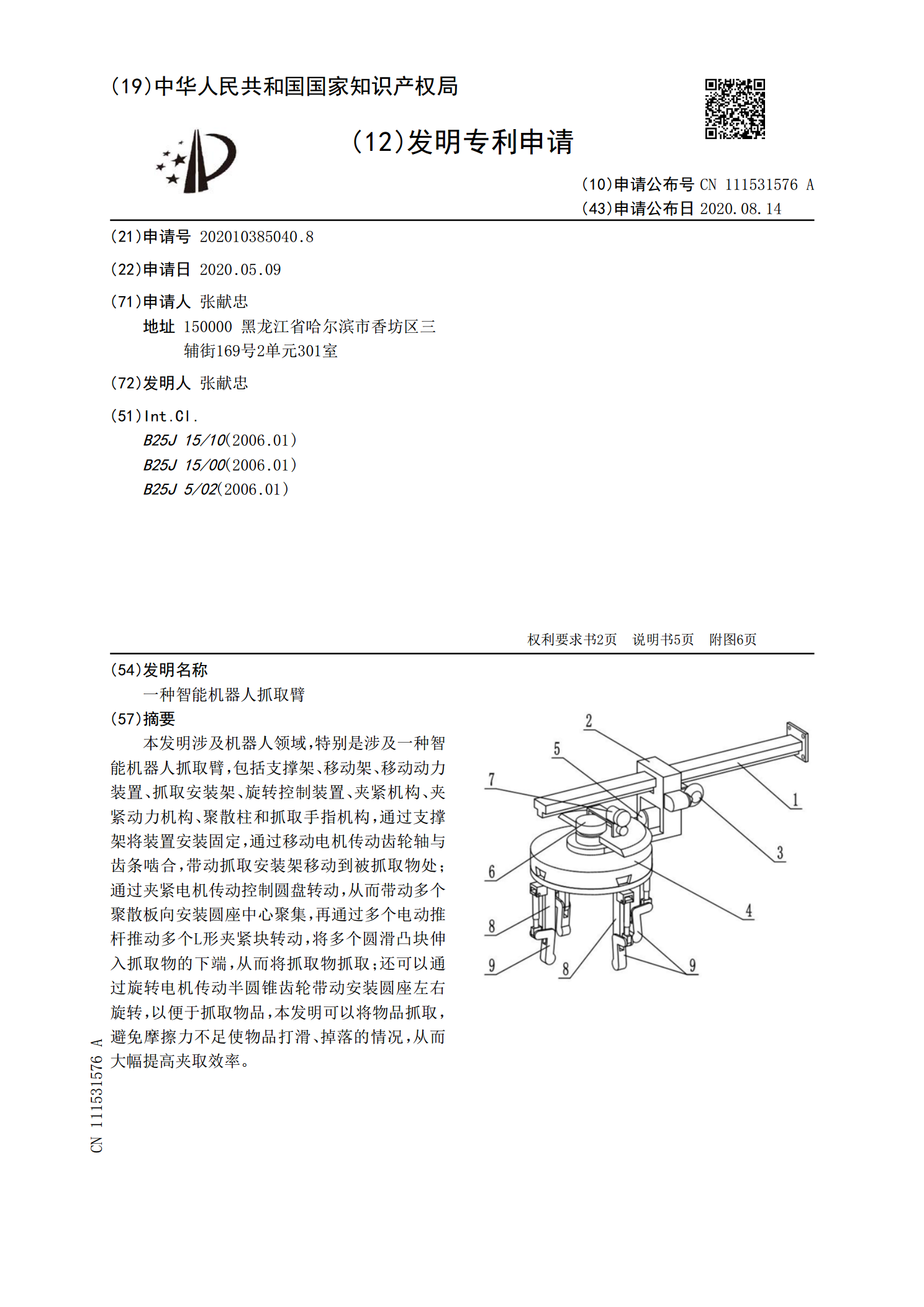
本发明涉及机器人领域,特别是涉及一种智能机器人抓取臂,包括支撑架、移动架、移动动力装置、抓取安装架、旋转控制装置、夹紧机构、夹紧动力机构、聚散柱和抓取手指机构,通过支撑架将装置安装固定,通过移动电机传动齿轮轴与齿条啮合,带动抓取安装架移动到被抓取物处;通过夹紧电机传动控制圆盘转动,从而带动多个聚散板向安装圆座中心聚集,再通过多个电动推杆推动多个L形夹紧块转动,将多个圆滑凸块伸入抓取物的下端,从而将抓取物抓取;还可以通过旋转电机传动半圆锥齿轮带动安装圆座左右旋转,以便于抓取物品,本发明可以将物品抓取,避免摩
一种智能机器人抓取结构.pdf
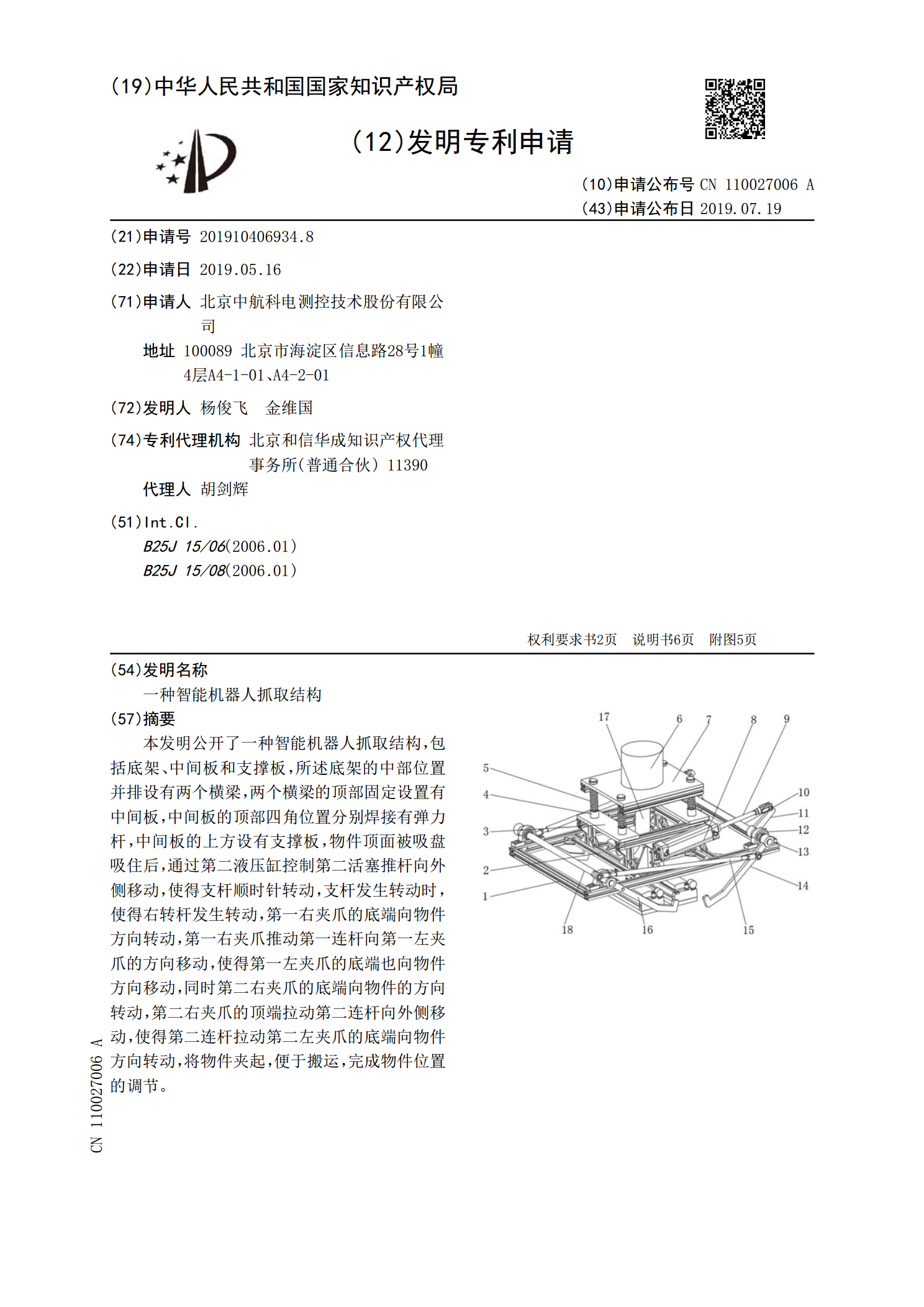
本发明公开了一种智能机器人抓取结构,包括底架、中间板和支撑板,所述底架的中部位置并排设有两个横梁,两个横梁的顶部固定设置有中间板,中间板的顶部四角位置分别焊接有弹力杆,中间板的上方设有支撑板,物件顶面被吸盘吸住后,通过第二液压缸控制第二活塞推杆向外侧移动,使得支杆顺时针转动,支杆发生转动时,使得右转杆发生转动,第一右夹爪的底端向物件方向转动,第一右夹爪推动第一连杆向第一左夹爪的方向移动,使得第一左夹爪的底端也向物件方向移动,同时第二右夹爪的底端向物件的方向转动,第二右夹爪的顶端拉动第二连杆向外侧移动,使得

一种基于智能制造的智能扫地防滑机器人.pdf
本发明涉及人工智能技术领域,且公开了一种基于智能制造的智能扫地防滑机器人,包括底座,所述底座的底部设置有滚轮,所述滚轮的侧面开设有环形槽,所述环形槽的内部通过滑块滑动连接有支撑杆,所述滚轮的顶部滑动连接有吸水块,所述吸水块的侧面固定连接有导电杆,所述导电杆的侧面设置有承接板,所述金属板的下方设置有导电板,所述底座的底部设置有抽水板,所述抽水板的顶部设置有蓄水箱,所述蓄水箱的内部设置有抽水管,所述抽水管的内部设置有抽水轴。该基于智能制造的智能扫地防滑机器人,通过吸水块与转轴的配合使用,从而达到了在机器人底部