
一种基于四杆式的上肢康复机器人.pdf

小新****ou

1/10
2/10

3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于四杆式的上肢康复机器人.pdf
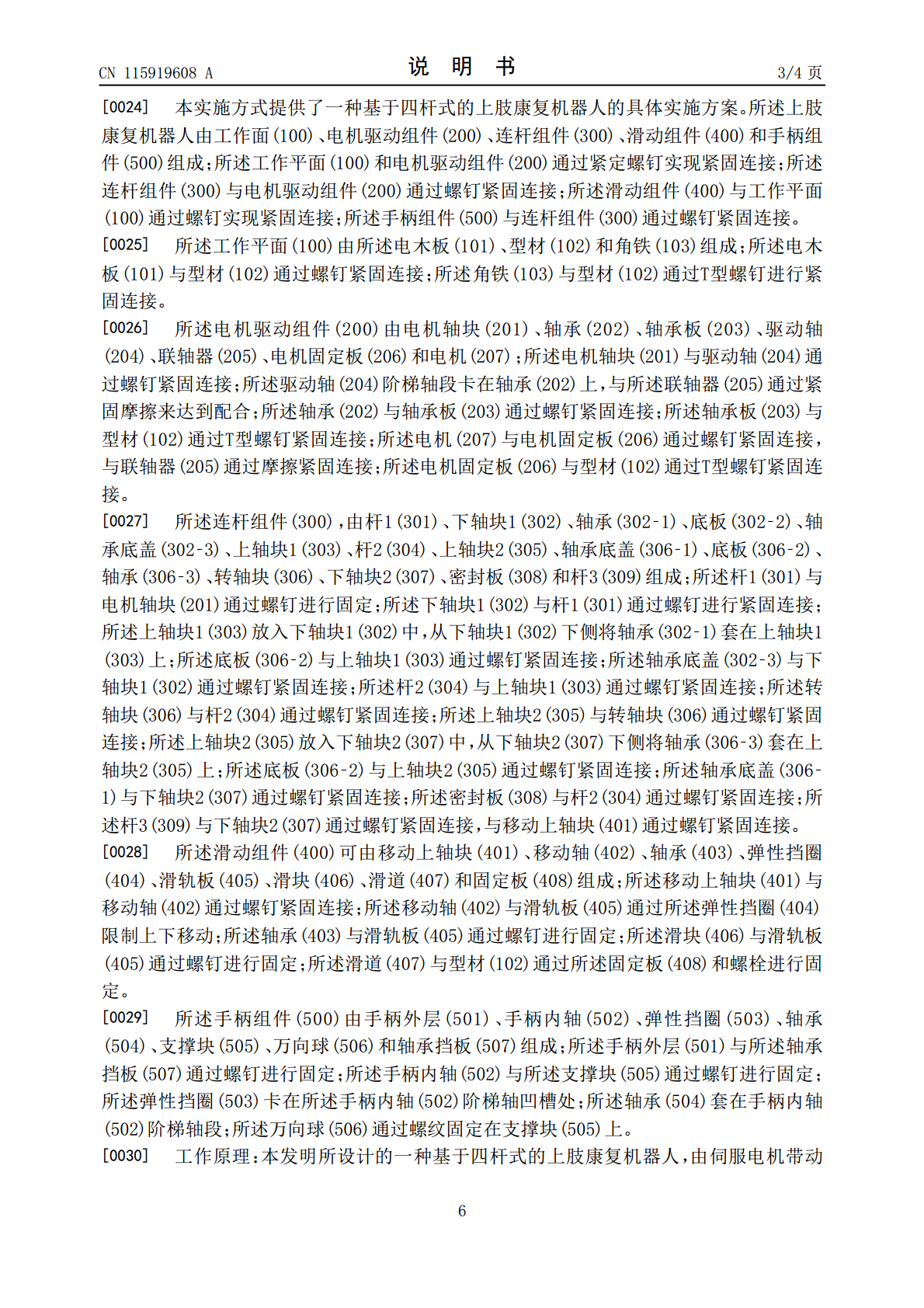
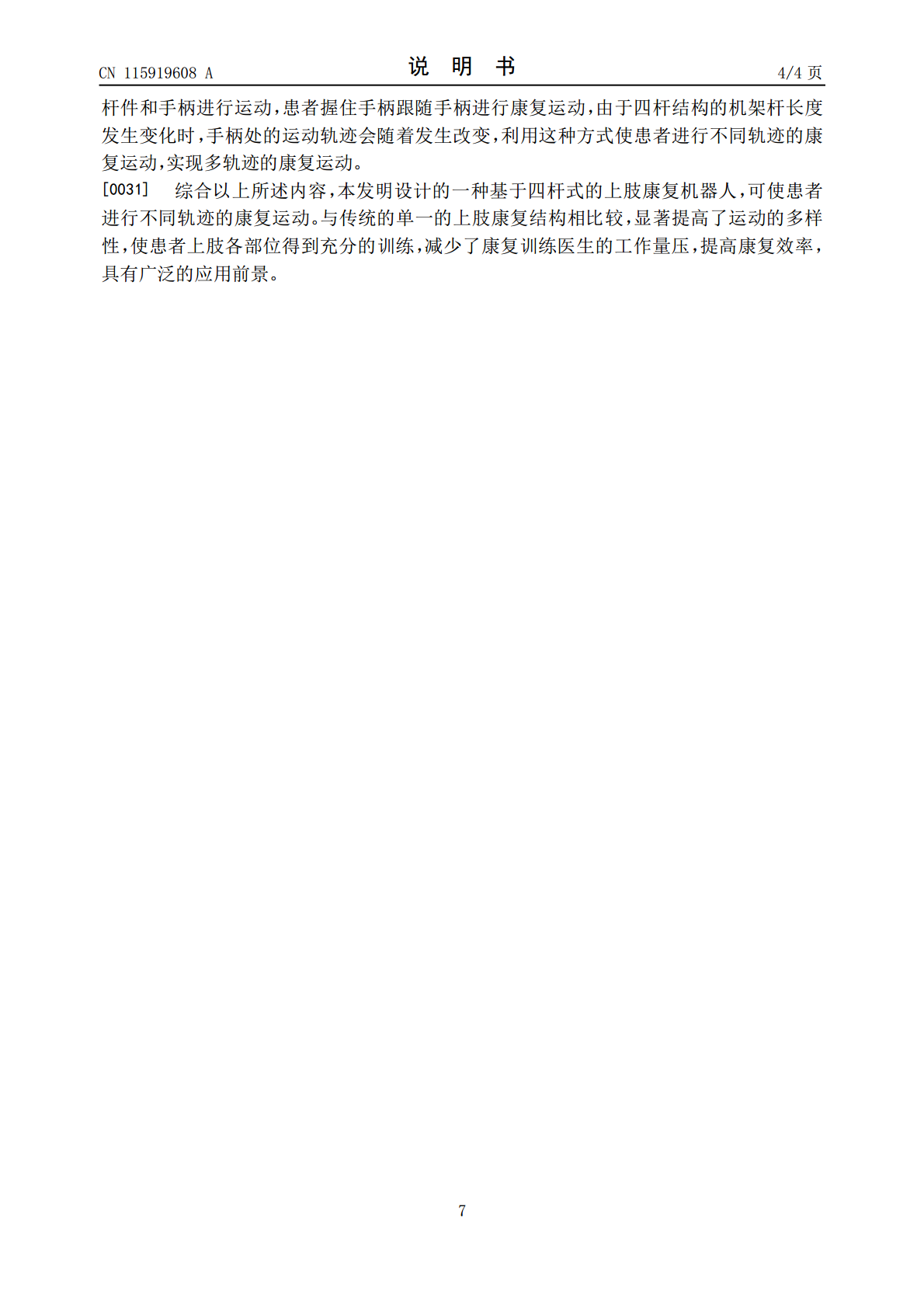
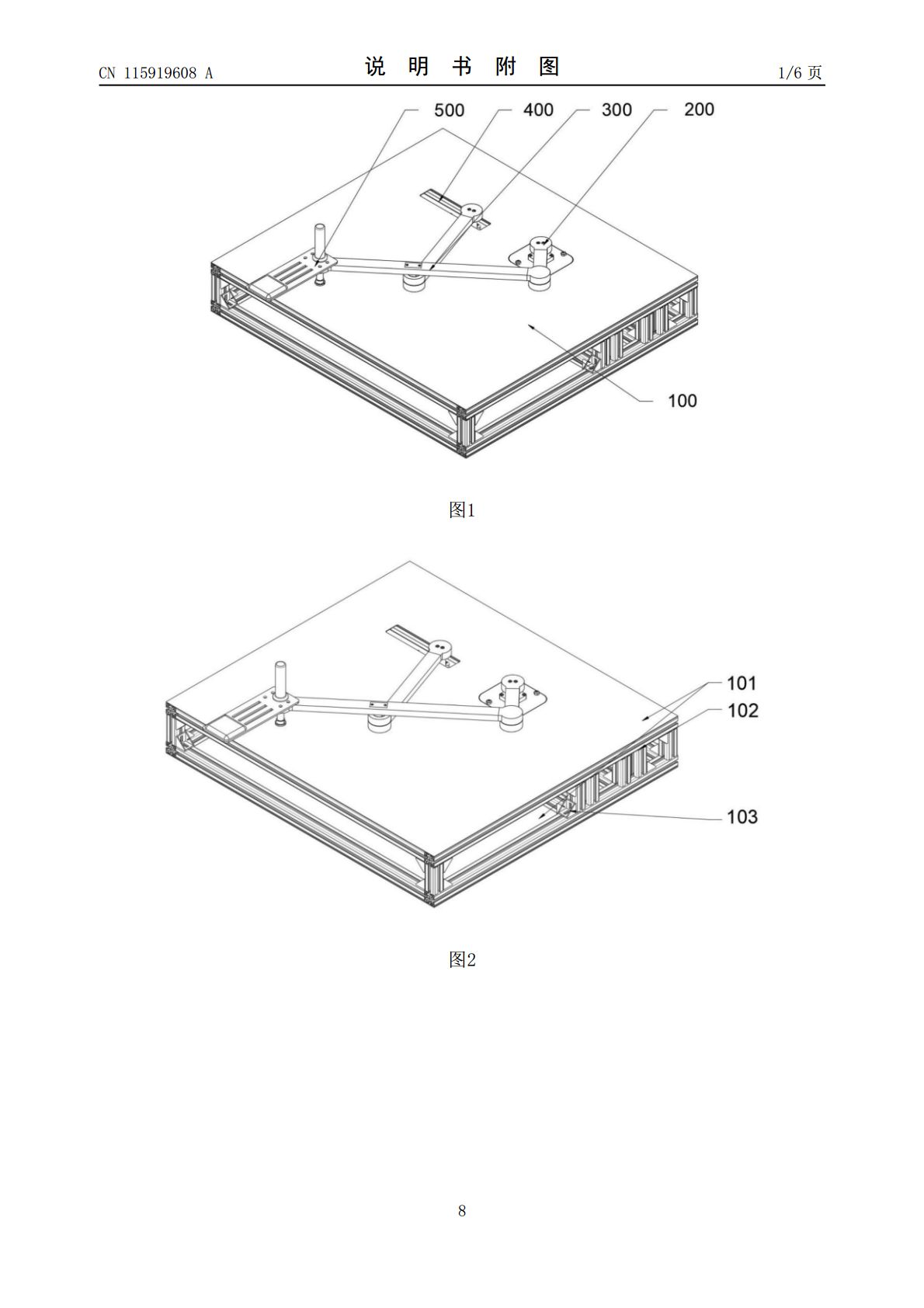
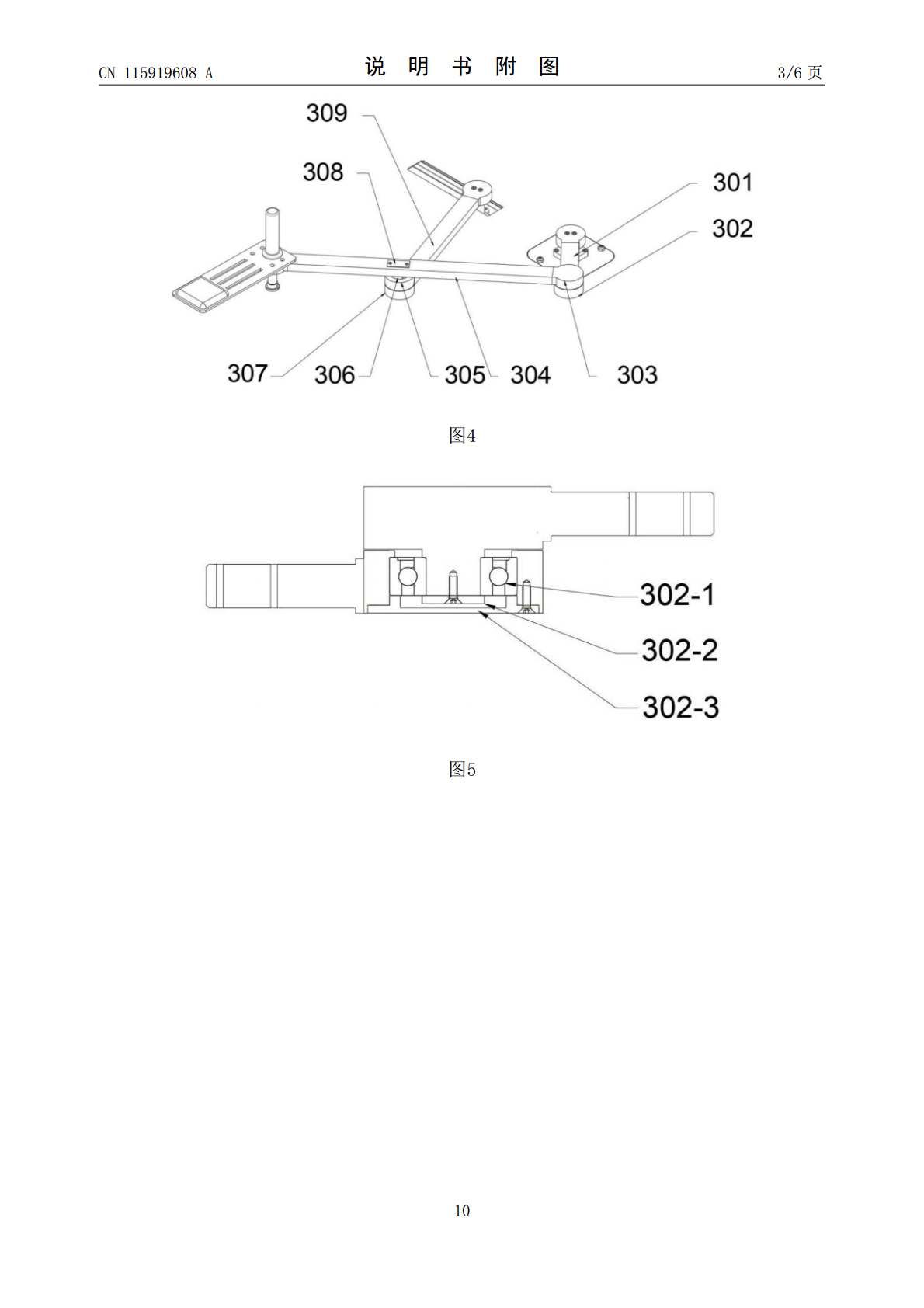
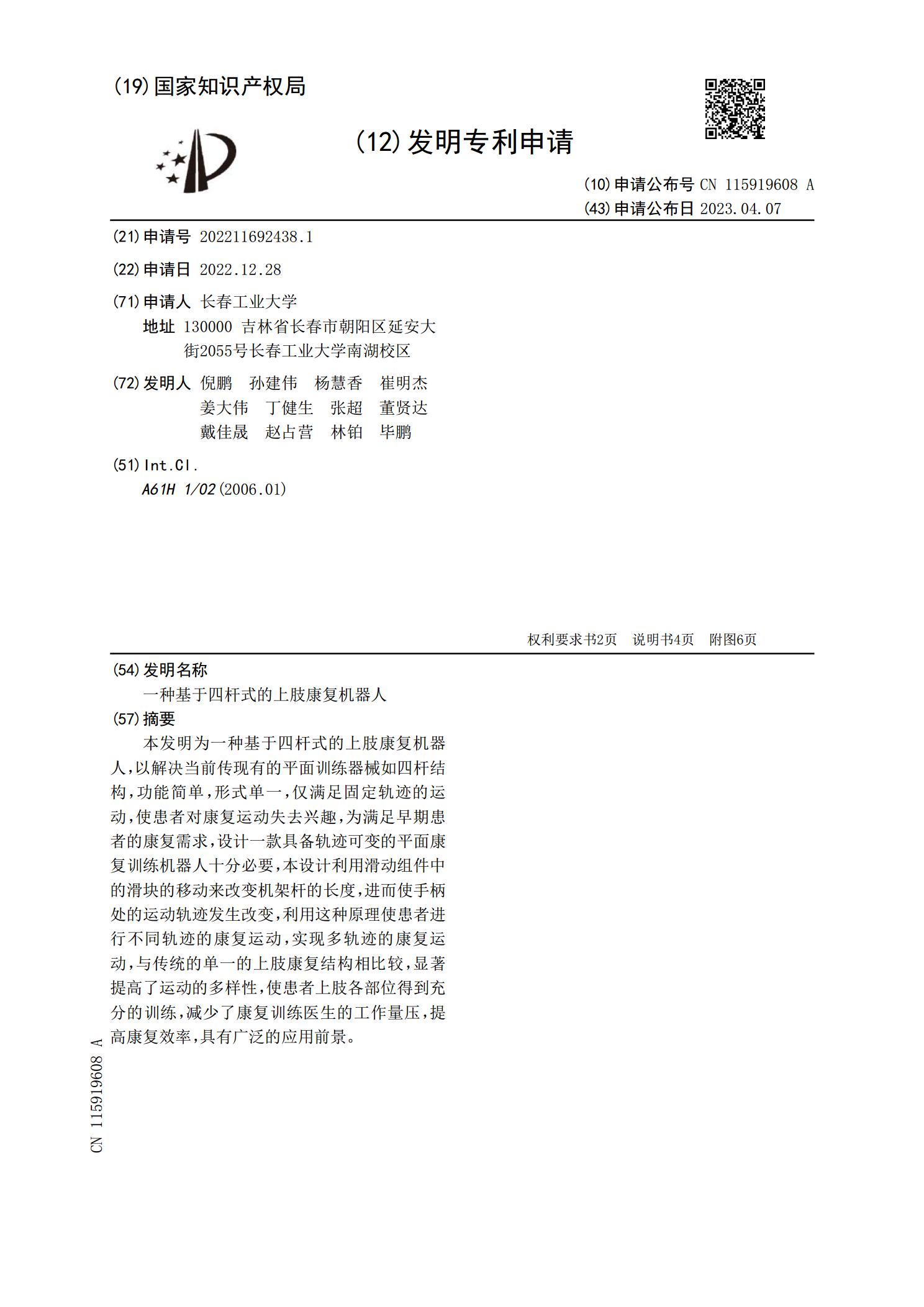
本发明为一种基于四杆式的上肢康复机器人,以解决当前传现有的平面训练器械如四杆结构,功能简单,形式单一,仅满足固定轨迹的运动,使患者对康复运动失去兴趣,为满足早期患者的康复需求,设计一款具备轨迹可变的平面康复训练机器人十分必要,本设计利用滑动组件中的滑块的移动来改变机架杆的长度,进而使手柄处的运动轨迹发生改变,利用这种原理使患者进行不同轨迹的康复运动,实现多轨迹的康复运动,与传统的单一的上肢康复结构相比较,显著提高了运动的多样性,使患者上肢各部位得到充分的训练,减少了康复训练医生的工作量压,提高康复效率,具
一种基于绳索驱动的上肢康复机器人.pdf
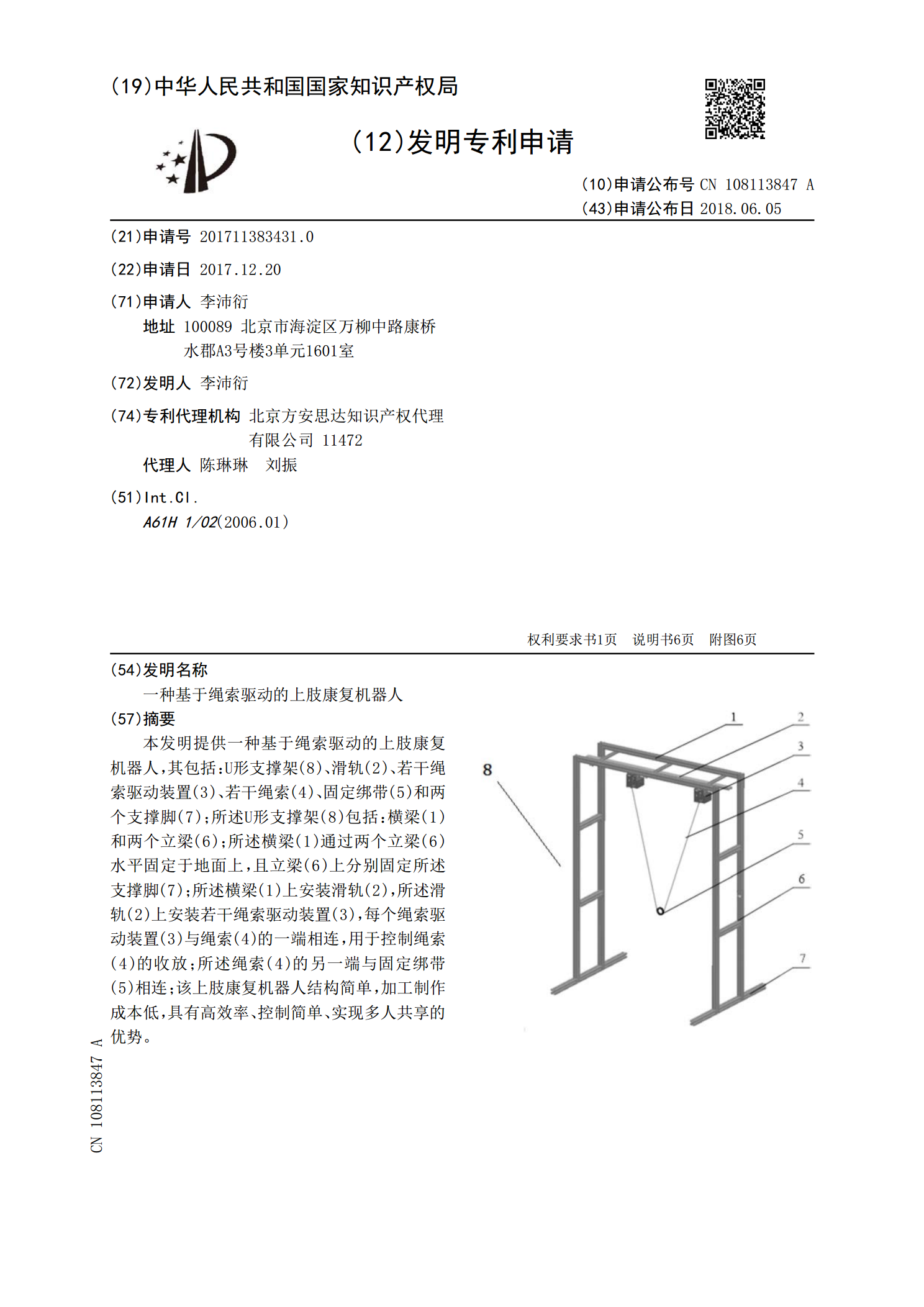
本发明提供一种基于绳索驱动的上肢康复机器人,其包括:U形支撑架(8)、滑轨(2)、若干绳索驱动装置(3)、若干绳索(4)、固定绑带(5)和两个支撑脚(7);所述U形支撑架(8)包括:横梁(1)和两个立梁(6);所述横梁(1)通过两个立梁(6)水平固定于地面上,且立梁(6)上分别固定所述支撑脚(7);所述横梁(1)上安装滑轨(2),所述滑轨(2)上安装若干绳索驱动装置(3),每个绳索驱动装置(3)与绳索(4)的一端相连,用于控制绳索(4)的收放;所述绳索(4)的另一端与固定绑带(5)相连;该上肢康复机器人结
一种末端牵引式上肢康复机器人.pdf
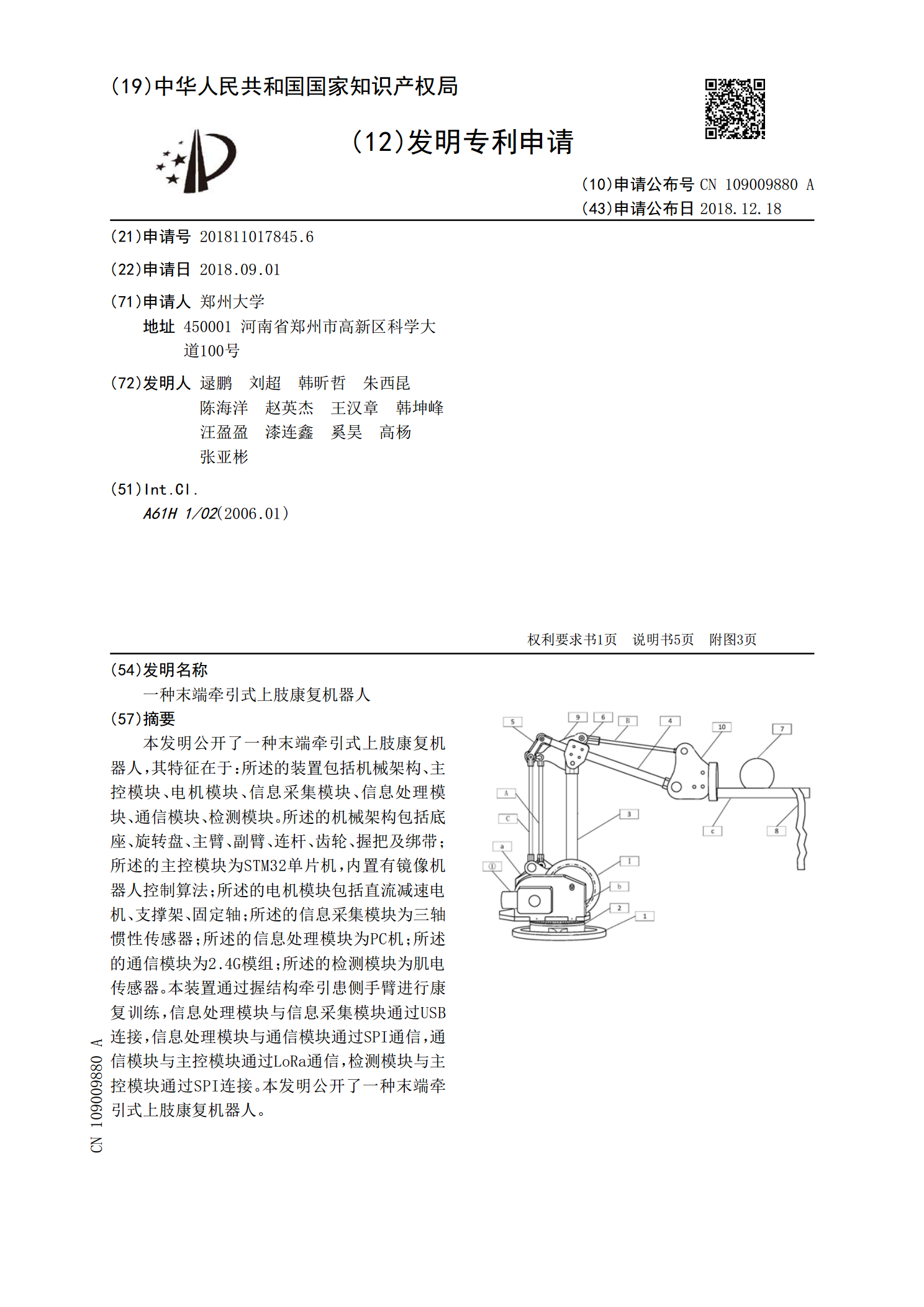
本发明公开了一种末端牵引式上肢康复机器人,其特征在于:所述的装置包括机械架构、主控模块、电机模块、信息采集模块、信息处理模块、通信模块、检测模块。所述的机械架构包括底座、旋转盘、主臂、副臂、连杆、齿轮、握把及绑带;所述的主控模块为STM32单片机,内置有镜像机器人控制算法;所述的电机模块包括直流减速电机、支撑架、固定轴;所述的信息采集模块为三轴惯性传感器;所述的信息处理模块为PC机;所述的通信模块为2.4G模组;所述的检测模块为肌电传感器。本装置通过握结构牵引患侧手臂进行康复训练,信息处理模块与信息采集模
基于Ⅰ类齿轮平面五杆机构的上肢末端导引式康复结构.pdf
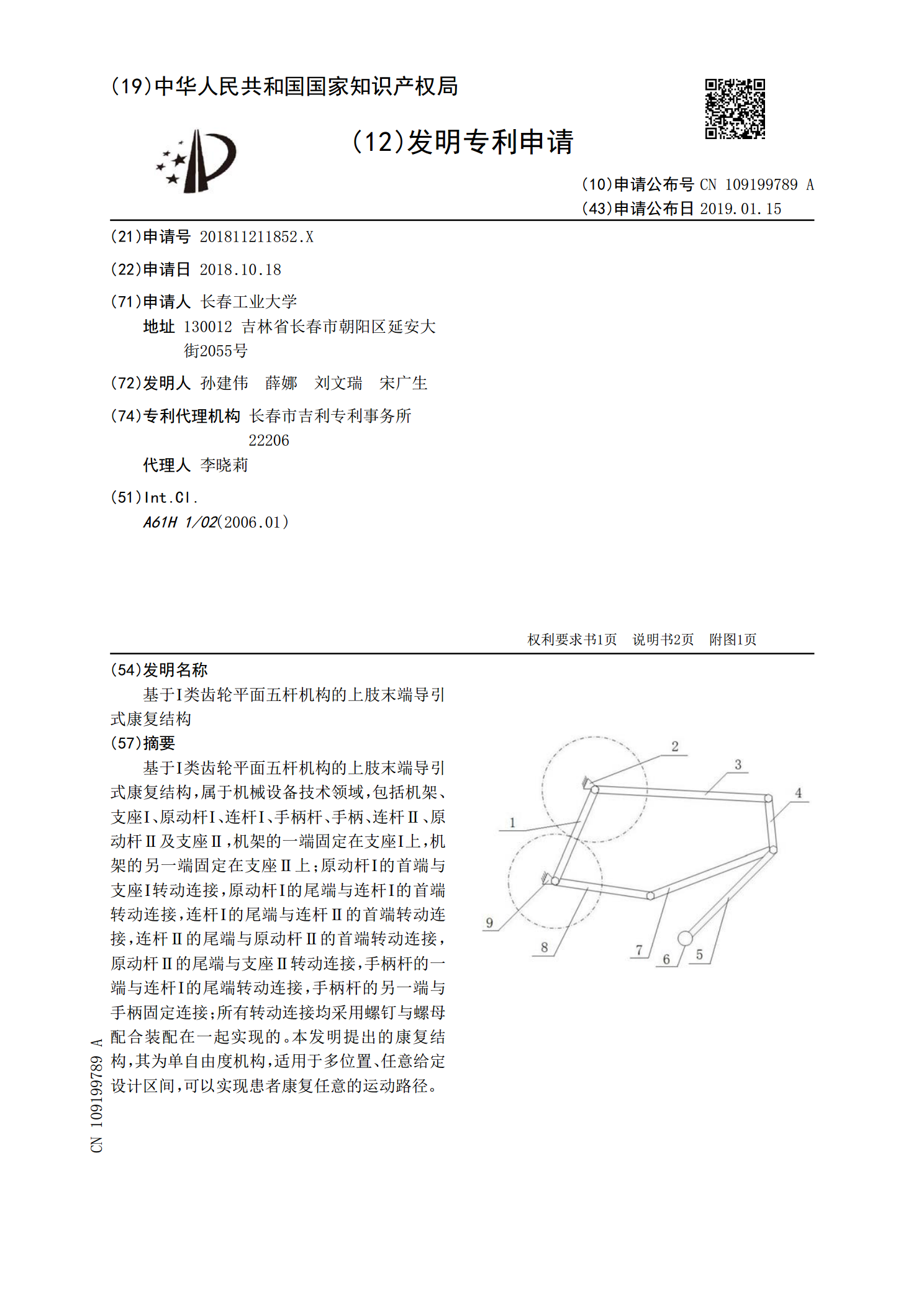
基于Ⅰ类齿轮平面五杆机构的上肢末端导引式康复结构,属于机械设备技术领域,包括机架、支座Ⅰ、原动杆Ⅰ、连杆Ⅰ、手柄杆、手柄、连杆Ⅱ、原动杆Ⅱ及支座Ⅱ,机架的一端固定在支座Ⅰ上,机架的另一端固定在支座Ⅱ上;原动杆Ⅰ的首端与支座Ⅰ转动连接,原动杆Ⅰ的尾端与连杆Ⅰ的首端转动连接,连杆Ⅰ的尾端与连杆Ⅱ的首端转动连接,连杆Ⅱ的尾端与原动杆Ⅱ的首端转动连接,原动杆Ⅱ的尾端与支座Ⅱ转动连接,手柄杆的一端与连杆Ⅰ的尾端转动连接,手柄杆的另一端与手柄固定连接;所有转动连接均采用螺钉与螺母配合装配在一起实现的。本发明提出的康复
可穿戴式上肢康复机器人.pdf
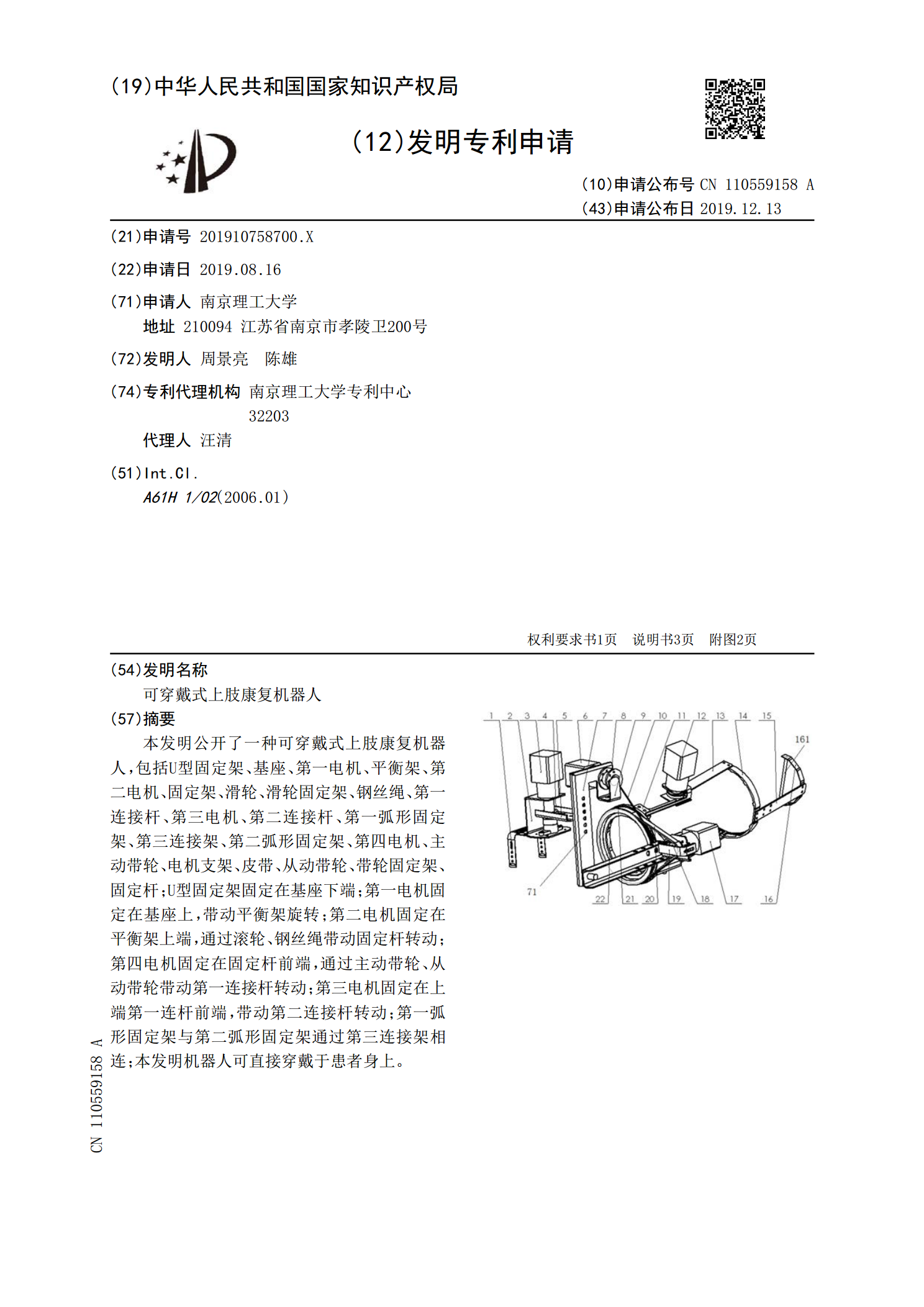
本发明公开了一种可穿戴式上肢康复机器人,包括U型固定架、基座、第一电机、平衡架、第二电机、固定架、滑轮、滑轮固定架、钢丝绳、第一连接杆、第三电机、第二连接杆、第一弧形固定架、第三连接架、第二弧形固定架、第四电机、主动带轮、电机支架、皮带、从动带轮、带轮固定架、固定杆;U型固定架固定在基座下端;第一电机固定在基座上,带动平衡架旋转;第二电机固定在平衡架上端,通过滚轮、钢丝绳带动固定杆转动;第四电机固定在固定杆前端,通过主动带轮、从动带轮带动第一连接杆转动;第三电机固定在上端第一连杆前端,带动第二连接杆转动;