
一种末端牵引式上肢康复机器人.pdf

映雁****魔王

1/10
2/10
3/10

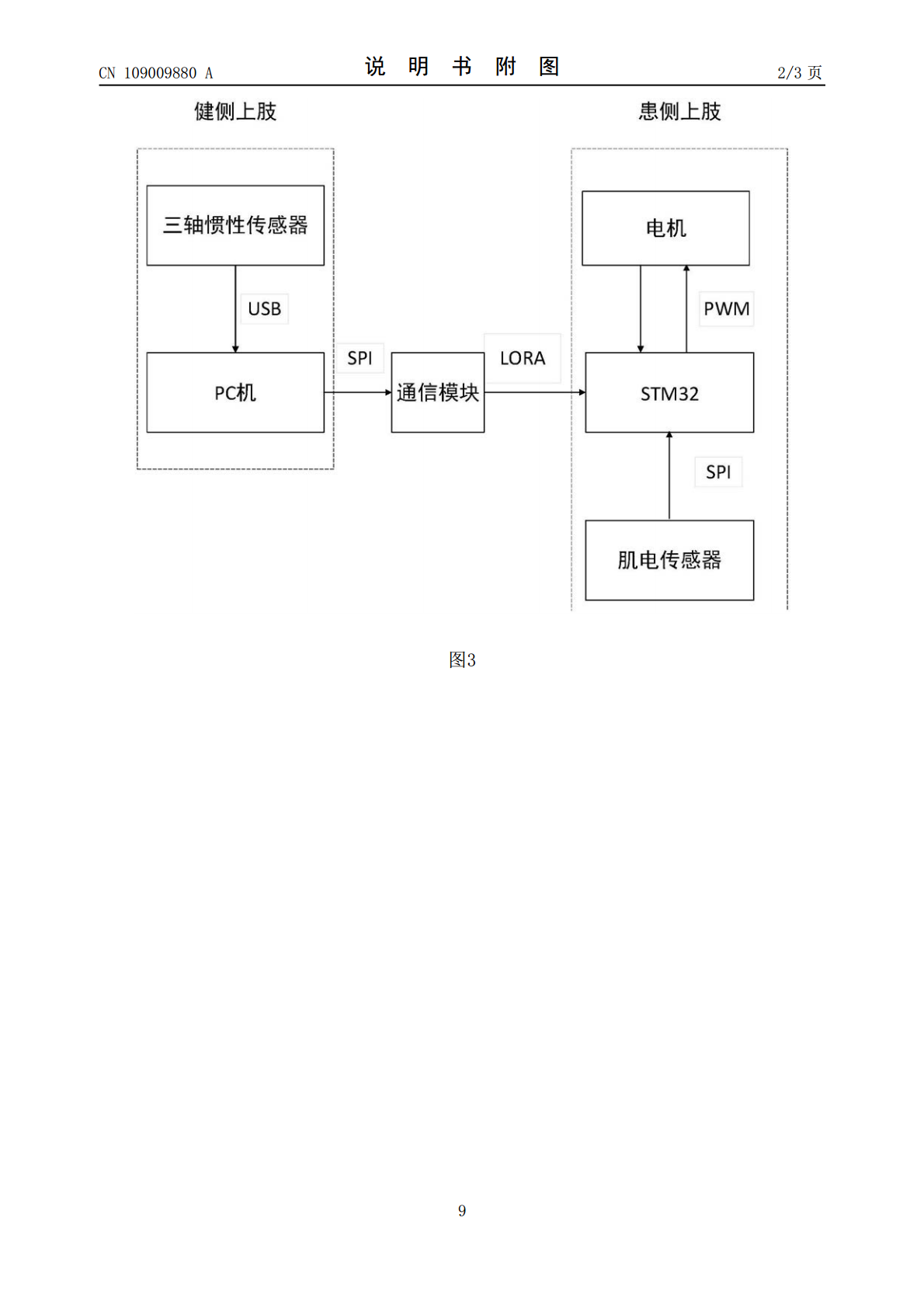
4/10
5/10
6/10
7/10

8/10
9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种末端牵引式上肢康复机器人.pdf
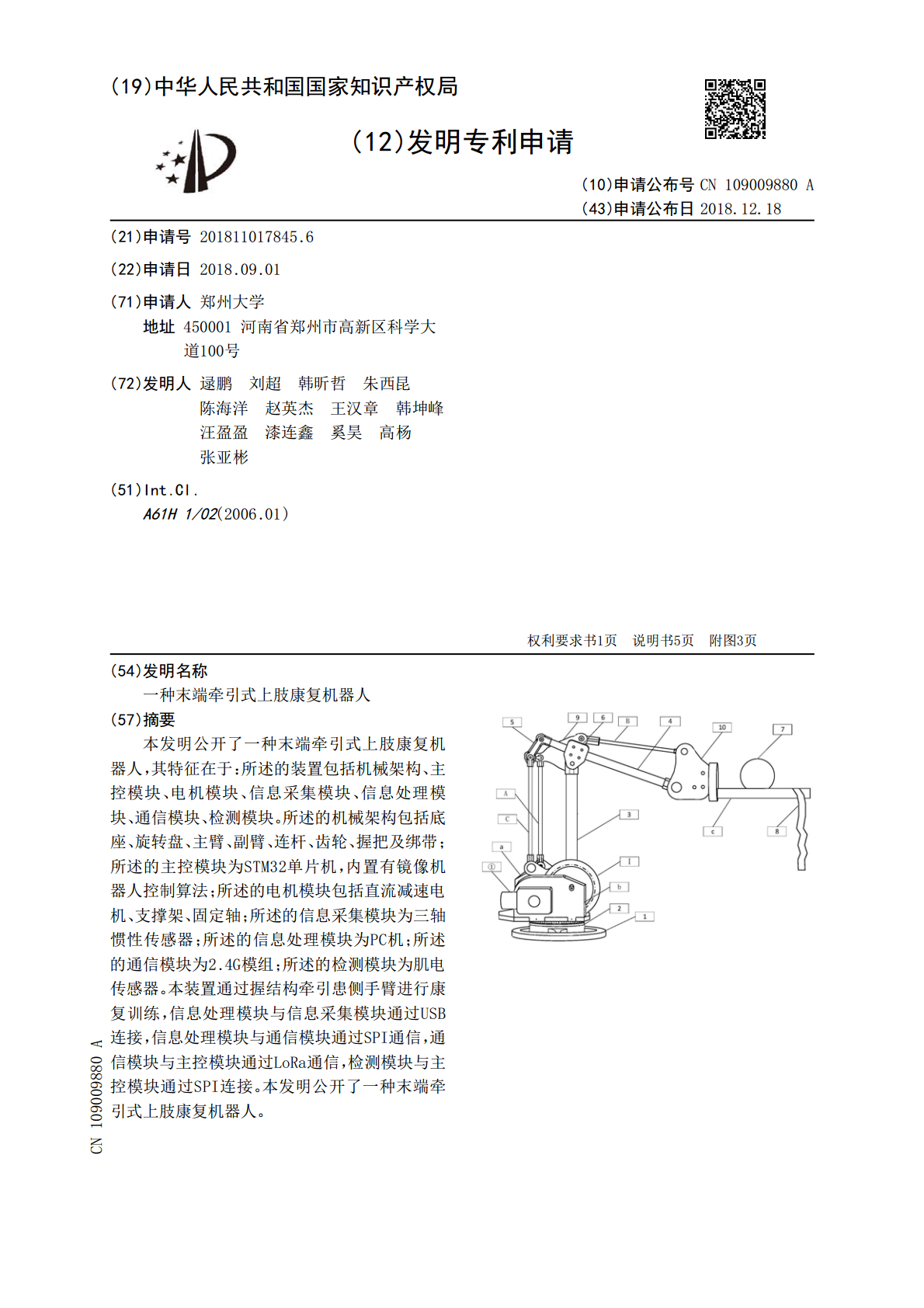
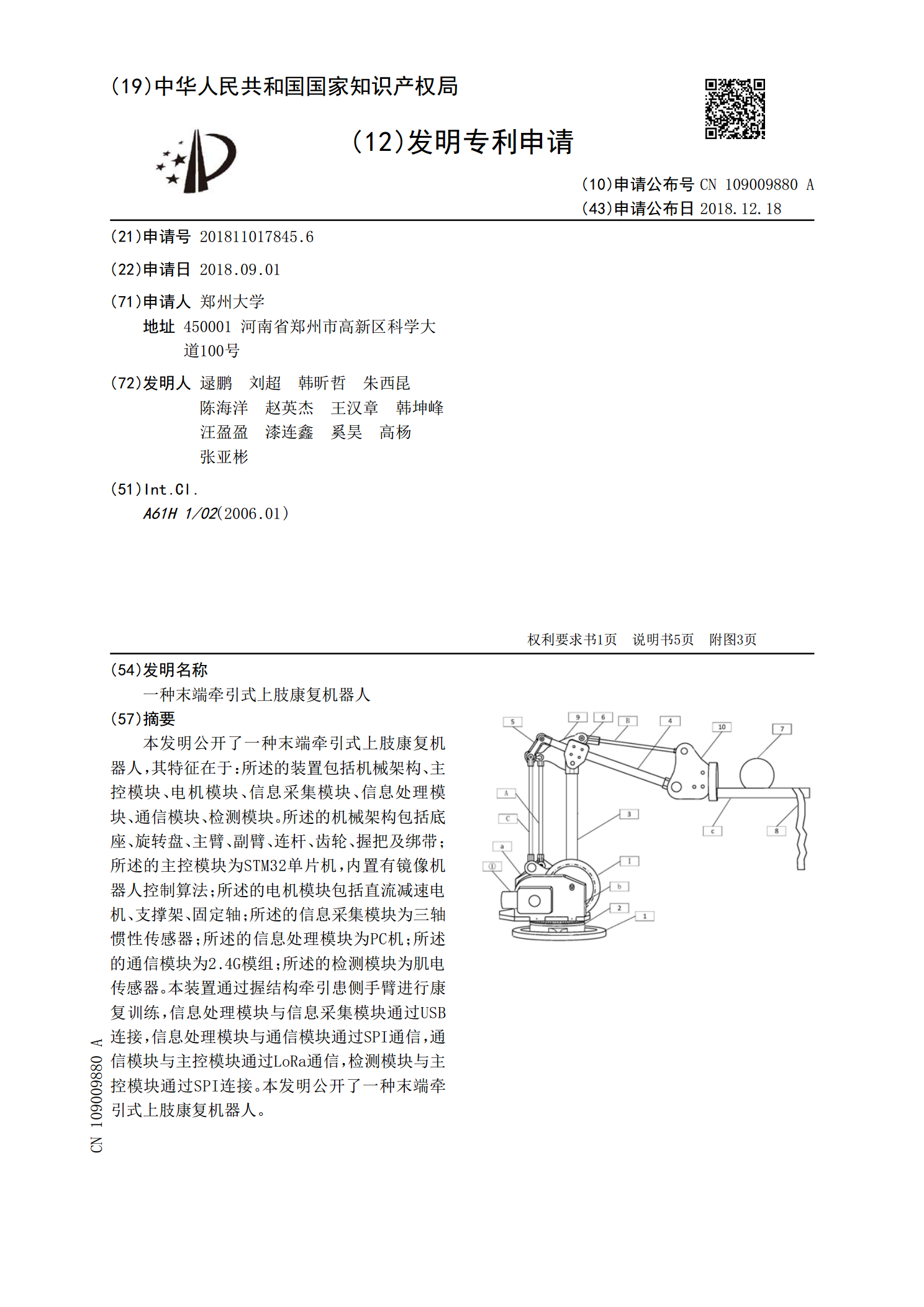
本发明公开了一种末端牵引式上肢康复机器人,其特征在于:所述的装置包括机械架构、主控模块、电机模块、信息采集模块、信息处理模块、通信模块、检测模块。所述的机械架构包括底座、旋转盘、主臂、副臂、连杆、齿轮、握把及绑带;所述的主控模块为STM32单片机,内置有镜像机器人控制算法;所述的电机模块包括直流减速电机、支撑架、固定轴;所述的信息采集模块为三轴惯性传感器;所述的信息处理模块为PC机;所述的通信模块为2.4G模组;所述的检测模块为肌电传感器。本装置通过握结构牵引患侧手臂进行康复训练,信息处理模块与信息采集模
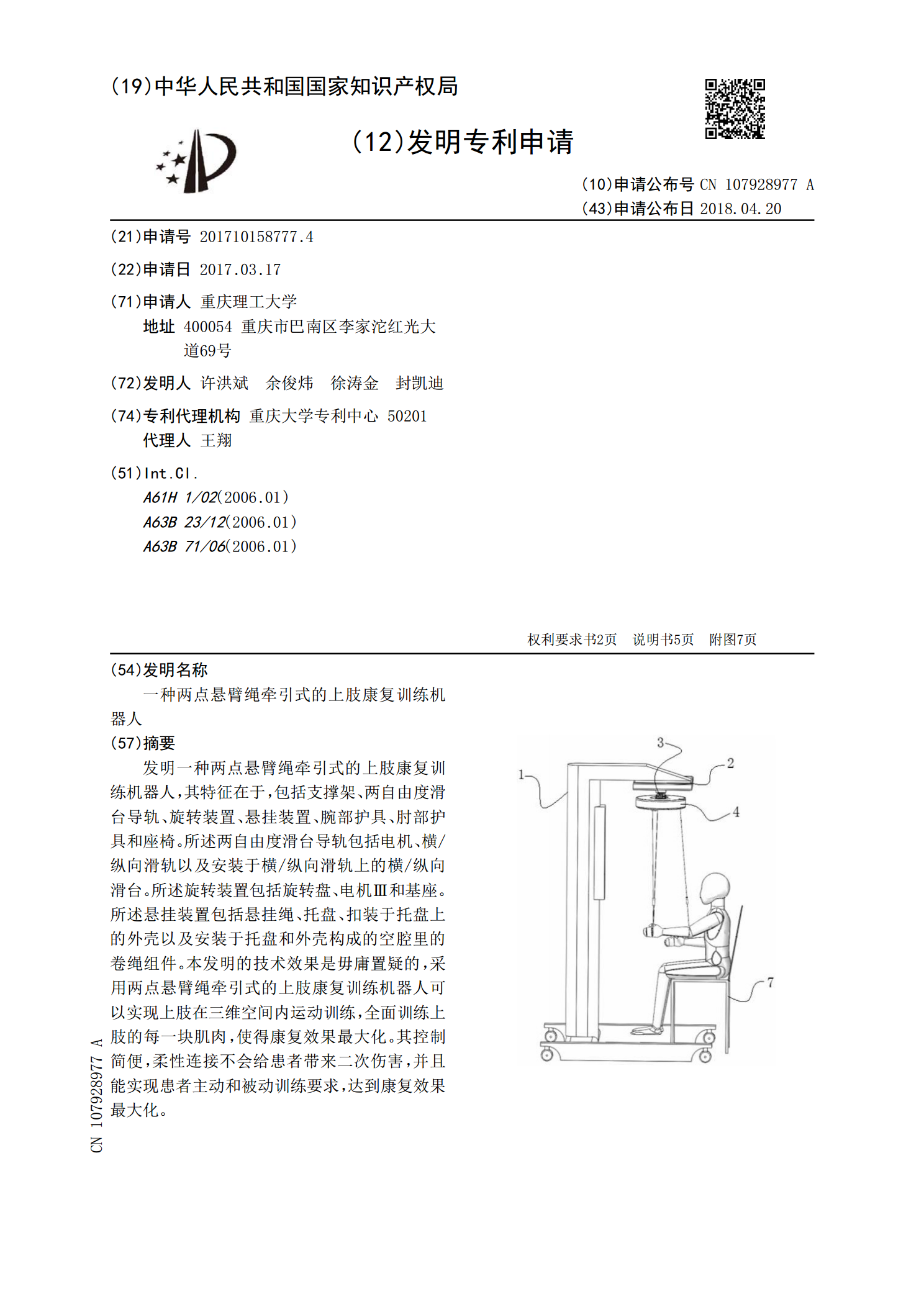
一种两点悬臂绳牵引式的上肢康复训练机器人.pdf
发明一种两点悬臂绳牵引式的上肢康复训练机器人,其特征在于,包括支撑架、两自由度滑台导轨、旋转装置、悬挂装置、腕部护具、肘部护具和座椅。所述两自由度滑台导轨包括电机、横/纵向滑轨以及安装于横/纵向滑轨上的横/纵向滑台。所述旋转装置包括旋转盘、电机Ⅲ和基座。所述悬挂装置包括悬挂绳、托盘、扣装于托盘上的外壳以及安装于托盘和外壳构成的空腔里的卷绳组件。本发明的技术效果是毋庸置疑的,采用两点悬臂绳牵引式的上肢康复训练机器人可以实现上肢在三维空间内运动训练,全面训练上肢的每一块肌肉,使得康复效果最大化。其控制简便,柔
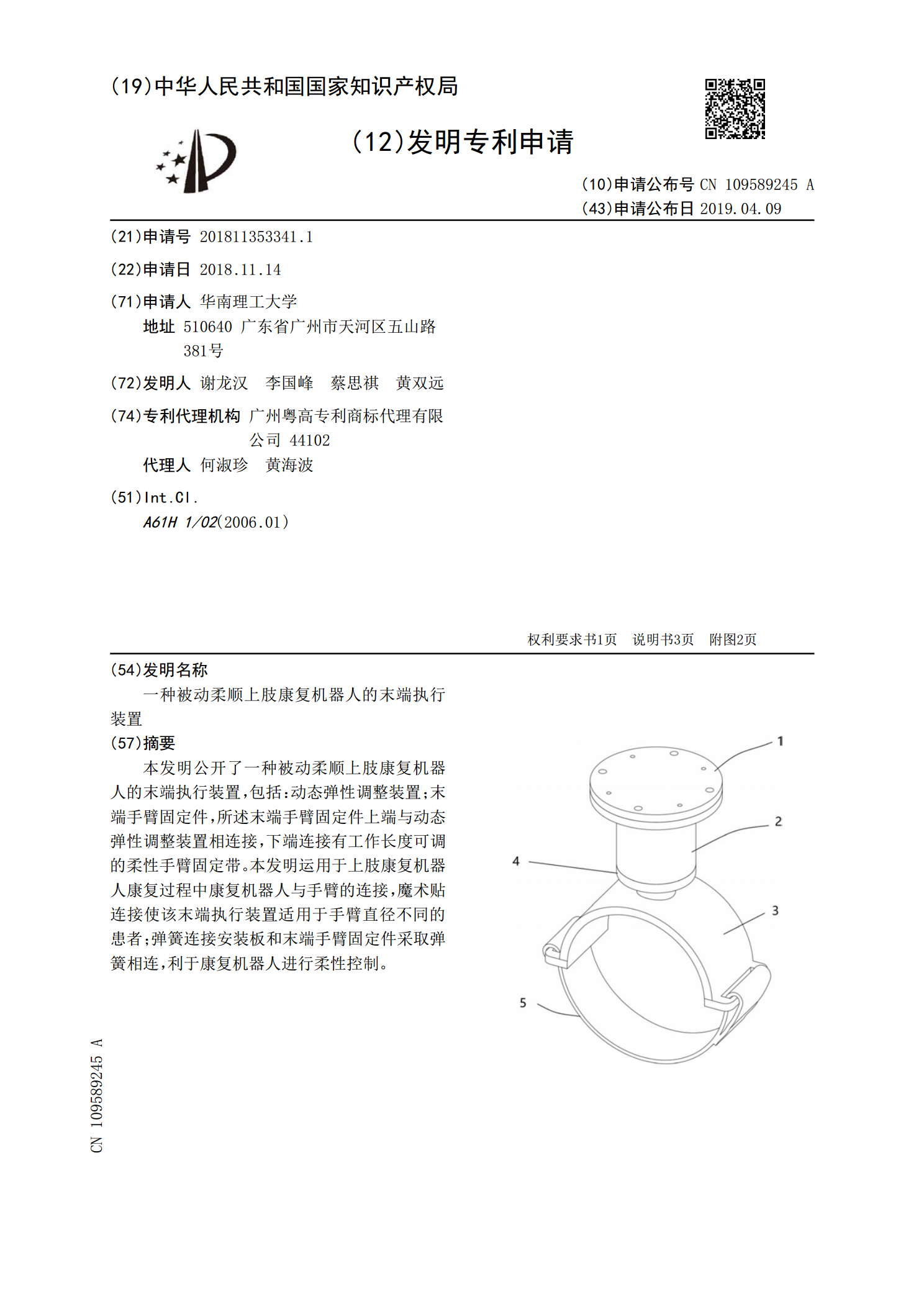
一种被动柔顺上肢康复机器人的末端执行装置.pdf
本发明公开了一种被动柔顺上肢康复机器人的末端执行装置,包括:动态弹性调整装置;末端手臂固定件,所述末端手臂固定件上端与动态弹性调整装置相连接,下端连接有工作长度可调的柔性手臂固定带。本发明运用于上肢康复机器人康复过程中康复机器人与手臂的连接,魔术贴连接使该末端执行装置适用于手臂直径不同的患者;弹簧连接安装板和末端手臂固定件采取弹簧相连,利于康复机器人进行柔性控制。

一种上肢牵引的康复轮椅.pdf
本发明公开了一种上肢牵引的康复轮椅,主要包括车体和牵引装置,车体包括靠垫、控制面板、扶手,靠垫为凸型结构,靠垫上均匀分布有凸块,扶手为内凹型结构,扶手通过固定杆安装于车体的左右两端,车体后方设有长条形固定板,长条形固定板上端面设有长条形滑槽,长条形滑槽上设有活动板一和活动板二,活动板一和活动板二前端下面分别设有牵引装置,牵引装置下方设有上肢活动器,上肢活动器有两个,左右对称设置在两个牵引装置下方,控制面板位于扶手上端面。总之,本发明通过牵引装置带动上肢活动器对上肢进行康复训练,结构简单,穿戴舒适,便于调节
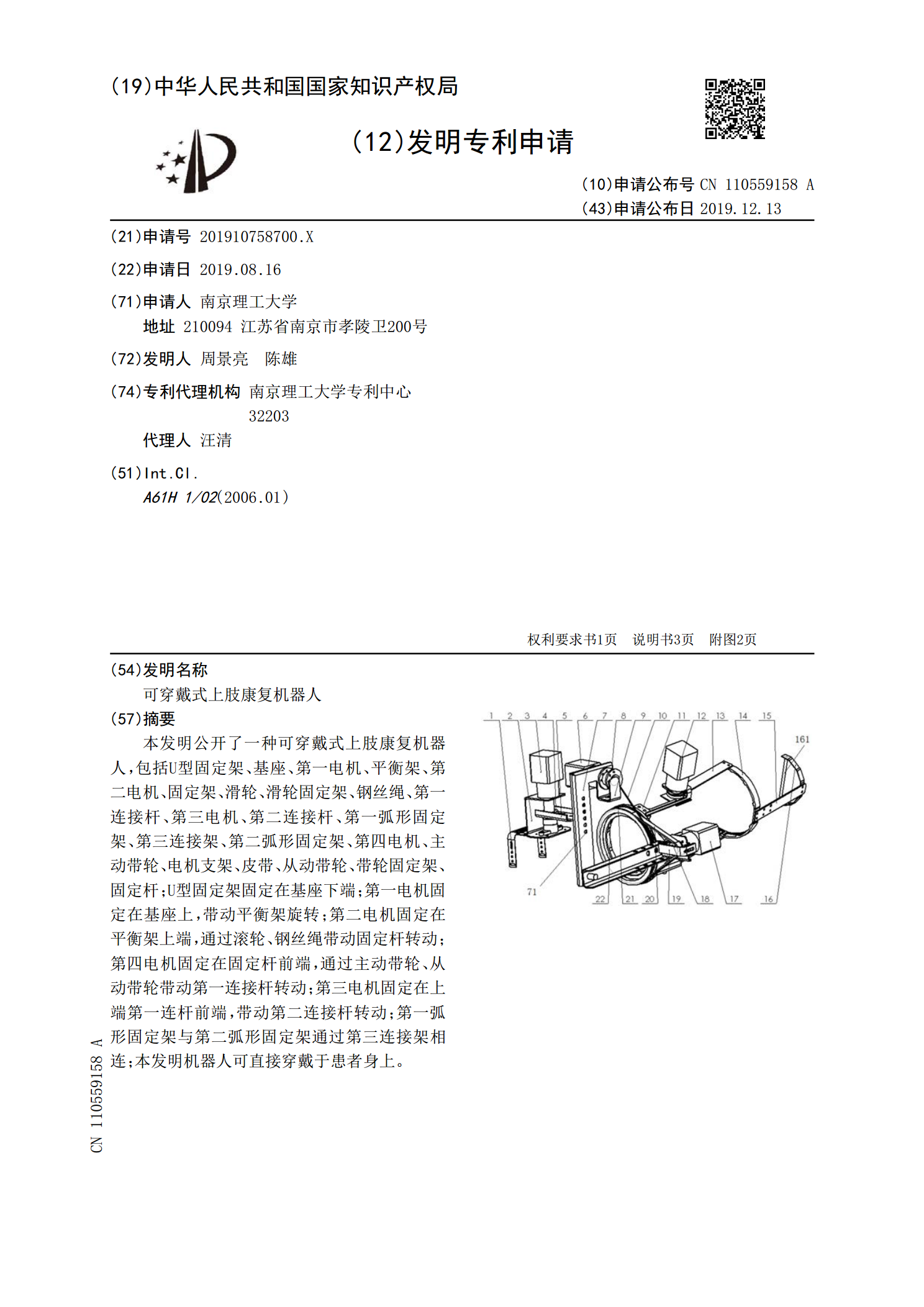
可穿戴式上肢康复机器人.pdf
本发明公开了一种可穿戴式上肢康复机器人,包括U型固定架、基座、第一电机、平衡架、第二电机、固定架、滑轮、滑轮固定架、钢丝绳、第一连接杆、第三电机、第二连接杆、第一弧形固定架、第三连接架、第二弧形固定架、第四电机、主动带轮、电机支架、皮带、从动带轮、带轮固定架、固定杆;U型固定架固定在基座下端;第一电机固定在基座上,带动平衡架旋转;第二电机固定在平衡架上端,通过滚轮、钢丝绳带动固定杆转动;第四电机固定在固定杆前端,通过主动带轮、从动带轮带动第一连接杆转动;第三电机固定在上端第一连杆前端,带动第二连接杆转动;