
基于Ⅰ类齿轮平面五杆机构的上肢末端导引式康复结构.pdf

书生****萌哒


1/5
2/5
3/5
4/5

5/5
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
基于Ⅰ类齿轮平面五杆机构的上肢末端导引式康复结构.pdf
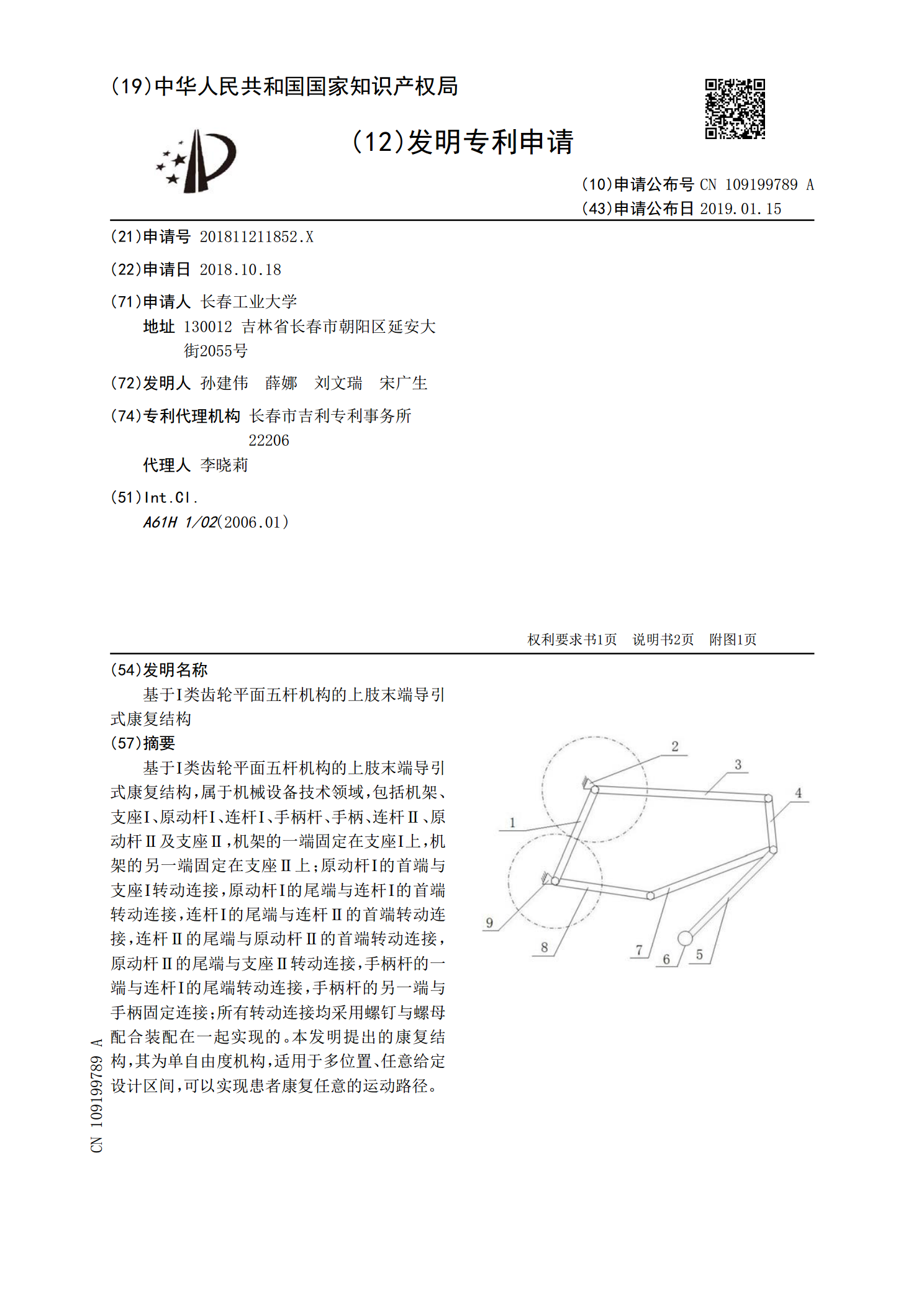
基于Ⅰ类齿轮平面五杆机构的上肢末端导引式康复结构,属于机械设备技术领域,包括机架、支座Ⅰ、原动杆Ⅰ、连杆Ⅰ、手柄杆、手柄、连杆Ⅱ、原动杆Ⅱ及支座Ⅱ,机架的一端固定在支座Ⅰ上,机架的另一端固定在支座Ⅱ上;原动杆Ⅰ的首端与支座Ⅰ转动连接,原动杆Ⅰ的尾端与连杆Ⅰ的首端转动连接,连杆Ⅰ的尾端与连杆Ⅱ的首端转动连接,连杆Ⅱ的尾端与原动杆Ⅱ的首端转动连接,原动杆Ⅱ的尾端与支座Ⅱ转动连接,手柄杆的一端与连杆Ⅰ的尾端转动连接,手柄杆的另一端与手柄固定连接;所有转动连接均采用螺钉与螺母配合装配在一起实现的。本发明提出的康复
一种基于四杆式的上肢康复机器人.pdf
本发明为一种基于四杆式的上肢康复机器人,以解决当前传现有的平面训练器械如四杆结构,功能简单,形式单一,仅满足固定轨迹的运动,使患者对康复运动失去兴趣,为满足早期患者的康复需求,设计一款具备轨迹可变的平面康复训练机器人十分必要,本设计利用滑动组件中的滑块的移动来改变机架杆的长度,进而使手柄处的运动轨迹发生改变,利用这种原理使患者进行不同轨迹的康复运动,实现多轨迹的康复运动,与传统的单一的上肢康复结构相比较,显著提高了运动的多样性,使患者上肢各部位得到充分的训练,减少了康复训练医生的工作量压,提高康复效率,具

基于末端牵引式康复机器人的定量化上肢运动功能评估研究.docx
基于末端牵引式康复机器人的定量化上肢运动功能评估研究标题:基于末端牵引式康复机器人的定量化上肢运动功能评估研究摘要:随着人口老龄化问题的加剧,上肢功能丧失的康复需求逐渐增加。末端牵引式康复机器人是一种广泛应用于上肢康复领域的新兴技术。本研究旨在基于末端牵引式康复机器人,通过定量化方法对上肢运动功能进行评估。方法包括建立评估指标体系、设计实验方案和采集数据,并通过数据分析和结果评价,验证末端牵引式康复机器人的评估效果。结果表明,末端牵引式康复机器人可以有效评估上肢运动功能,为上肢康复治疗提供了可行性和有效性
一种末端牵引式上肢康复机器人.pdf
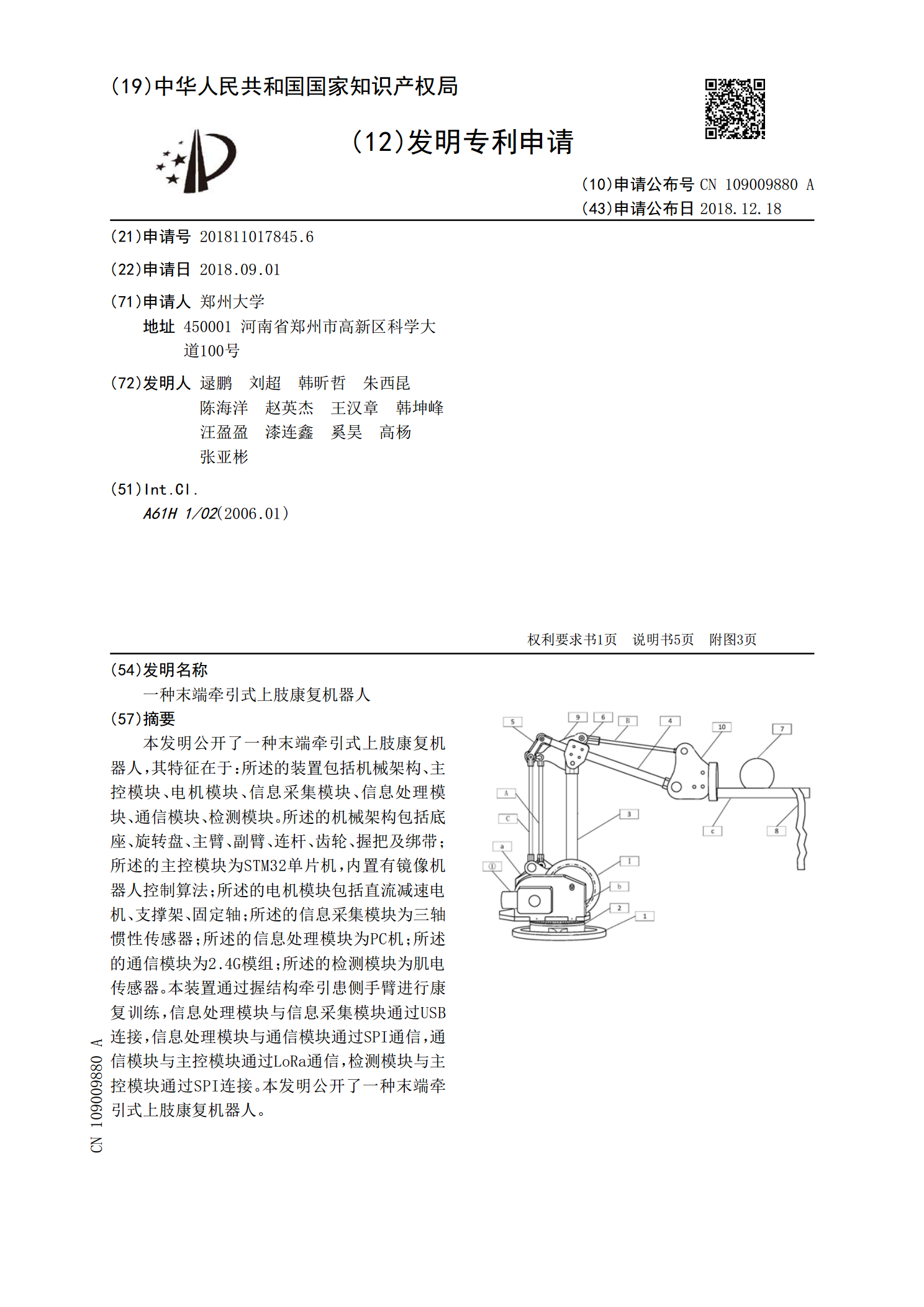
本发明公开了一种末端牵引式上肢康复机器人,其特征在于:所述的装置包括机械架构、主控模块、电机模块、信息采集模块、信息处理模块、通信模块、检测模块。所述的机械架构包括底座、旋转盘、主臂、副臂、连杆、齿轮、握把及绑带;所述的主控模块为STM32单片机,内置有镜像机器人控制算法;所述的电机模块包括直流减速电机、支撑架、固定轴;所述的信息采集模块为三轴惯性传感器;所述的信息处理模块为PC机;所述的通信模块为2.4G模组;所述的检测模块为肌电传感器。本装置通过握结构牵引患侧手臂进行康复训练,信息处理模块与信息采集模

一种平面五杆机构柔性腿结构.pdf
本发明公开一种平面五杆机构柔性腿结构,其特征在于该柔性腿结构包括俯仰驱动关节、足尖以及连杆机构;所述俯仰驱动关节包括变刚度主动柔性关节、驱动电机、两个谐波减速器、支撑架、同步带轮和同步带,所述足尖包括三维力学传感器,三维力学传感器支架和足弓;三维力学传感器下面与三维力学传感器支架连接,三维力学传感器支架下面与足弓连接;所述连杆机构具有(A)、(B)、(C)、(D)、(E)、(F)、(G)、(H)、(R)和(I)共10个铰接点,利用10个铰接点,把各连杆铰接为一个常规的四杆机构、一个带有弹簧杆的四杆机构和一