
可穿戴式上肢康复机器人.pdf

一条****贺6


1/7

2/7
3/7
4/7

5/7
6/7
7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
可穿戴式上肢康复机器人.pdf
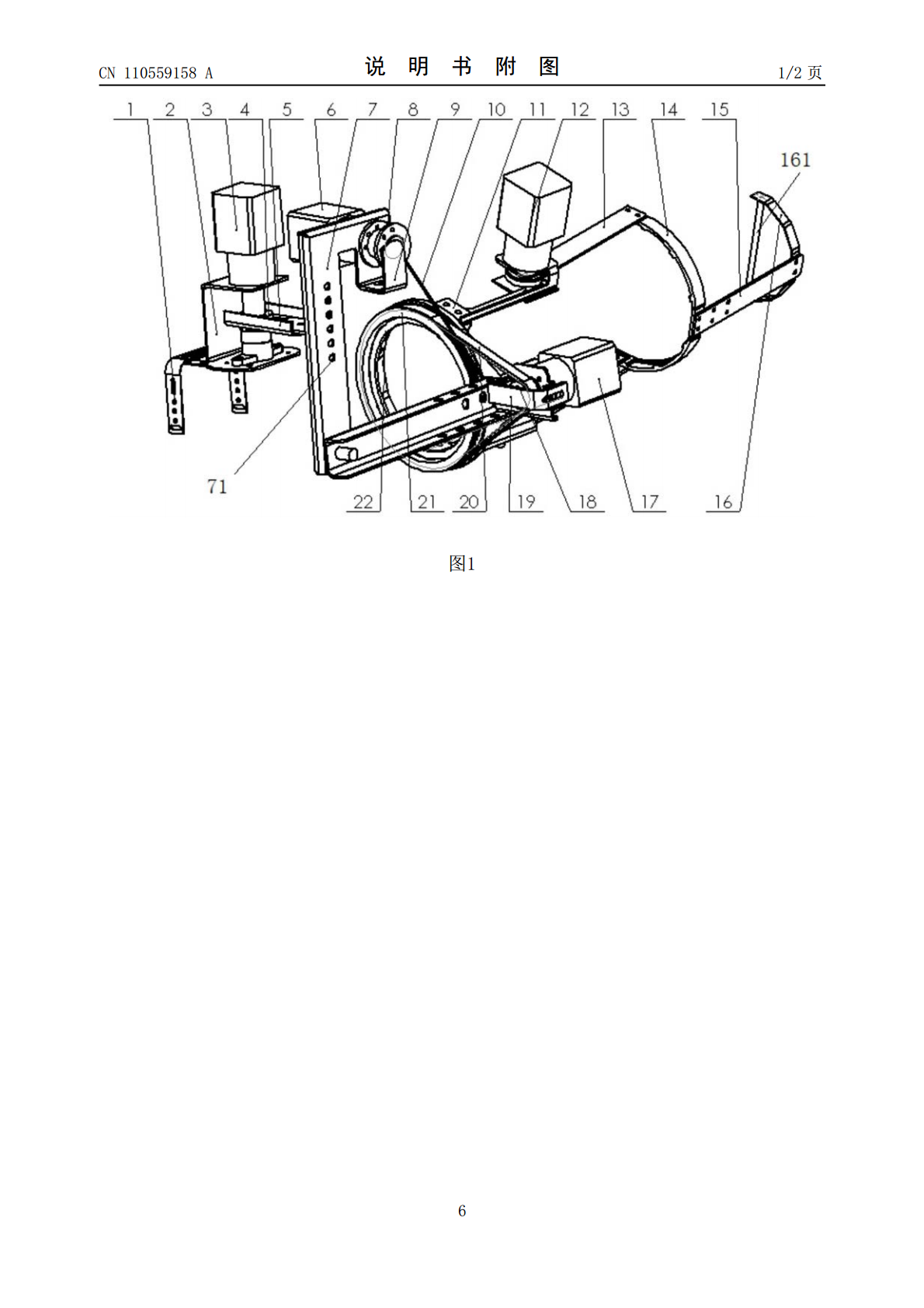
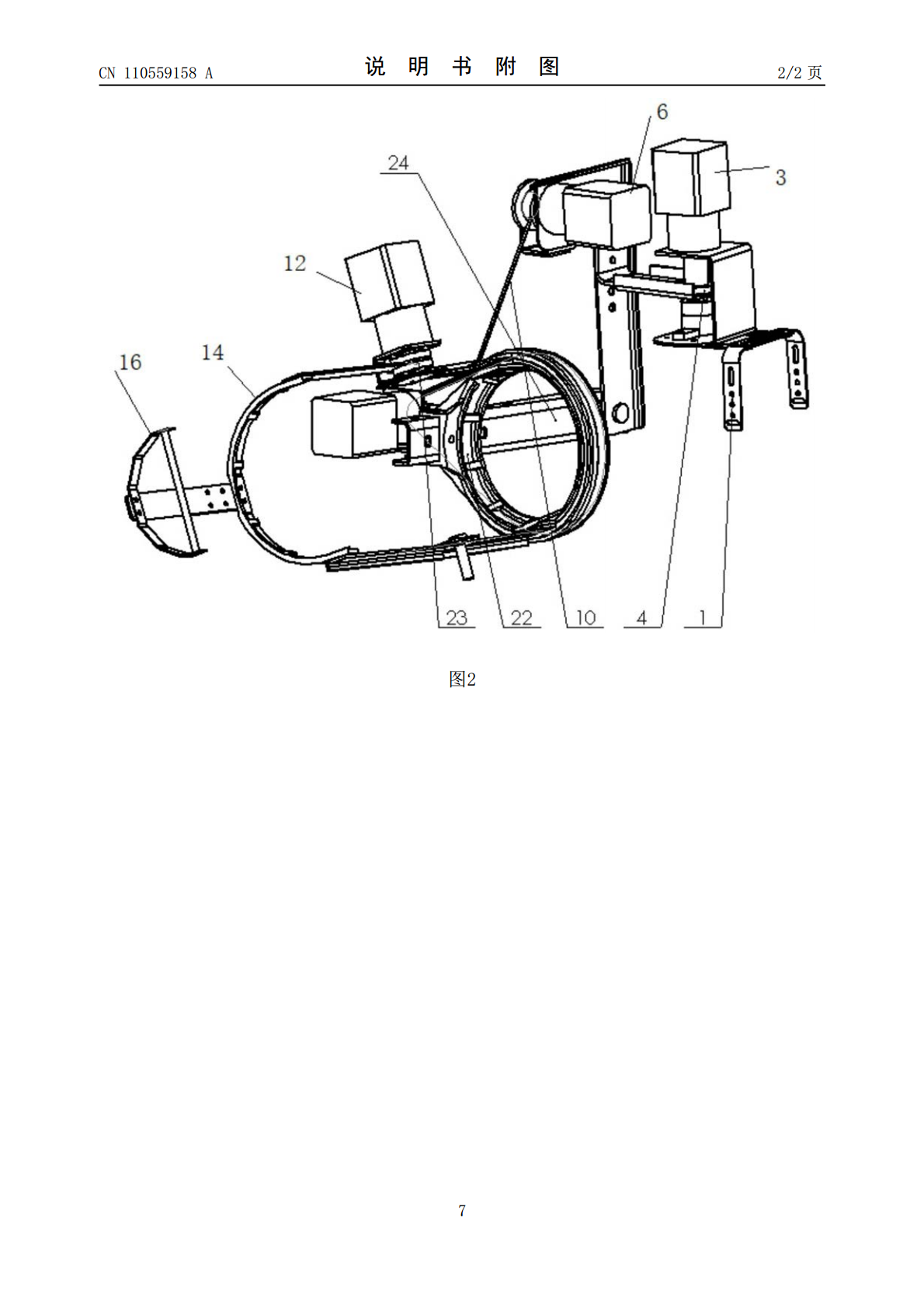
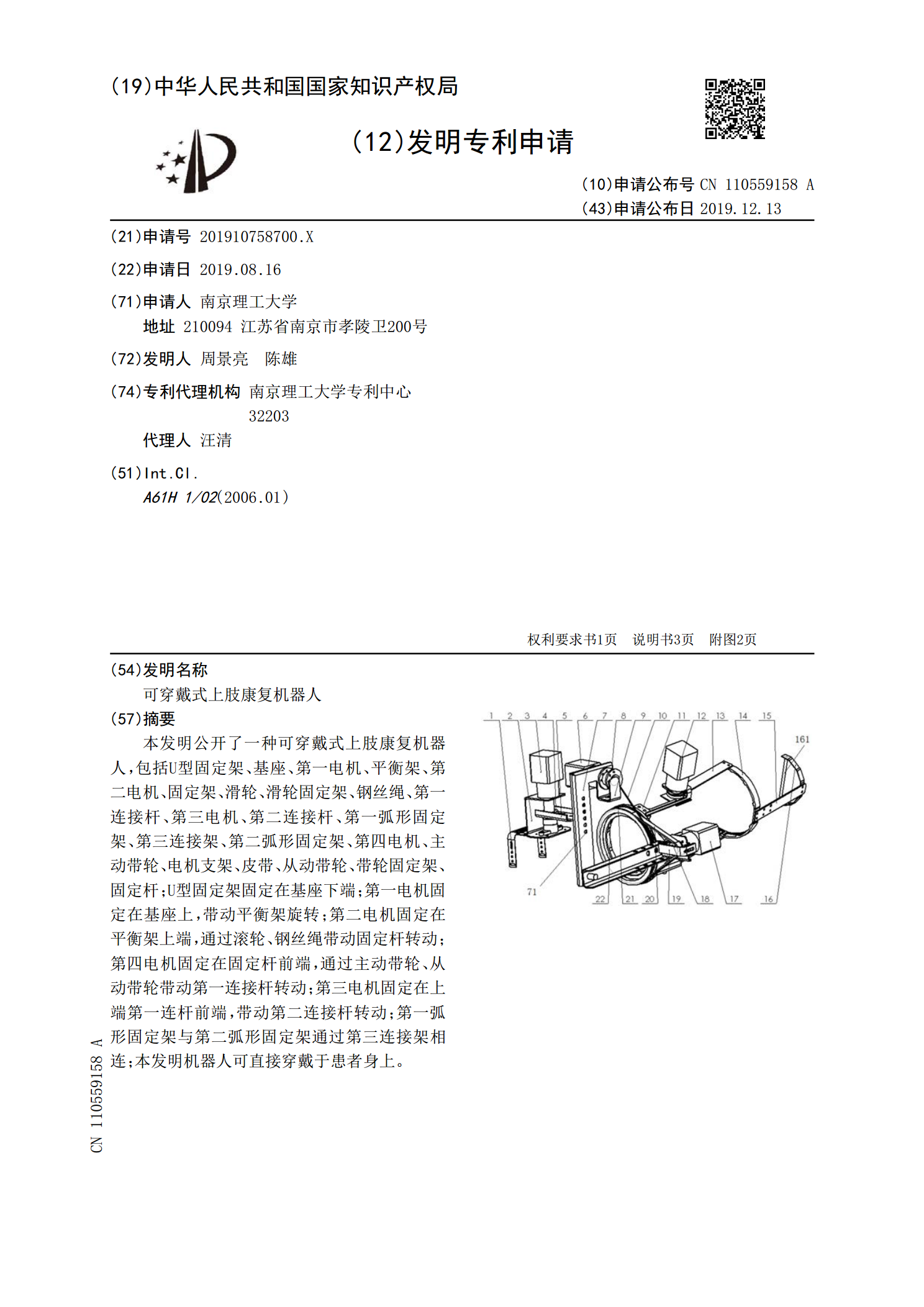
本发明公开了一种可穿戴式上肢康复机器人,包括U型固定架、基座、第一电机、平衡架、第二电机、固定架、滑轮、滑轮固定架、钢丝绳、第一连接杆、第三电机、第二连接杆、第一弧形固定架、第三连接架、第二弧形固定架、第四电机、主动带轮、电机支架、皮带、从动带轮、带轮固定架、固定杆;U型固定架固定在基座下端;第一电机固定在基座上,带动平衡架旋转;第二电机固定在平衡架上端,通过滚轮、钢丝绳带动固定杆转动;第四电机固定在固定杆前端,通过主动带轮、从动带轮带动第一连接杆转动;第三电机固定在上端第一连杆前端,带动第二连接杆转动;

基于外骨骼的可穿戴式上肢康复机器人设计与研究.docx
基于外骨骼的可穿戴式上肢康复机器人设计与研究摘要随着人口老龄化和对康复的需求增加,可穿戴式康复机器人成为受关注的领域。本文提出一种基于外骨骼的可穿戴式上肢康复机器人的设计与研究方案。该方案采用了先进的传感器和执行器技术,提供了高度自适应的康复方案。通过机器人协助下的医疗康复训练,被试者在训练中显著改善了上肢运动功能和力量。本文通过实验评估机器人的性能以及其在康复训练中的应用效果。关键词:可穿戴式康复机器人、外骨骼、上肢康复、传感器、执行器引言近年来,人口老龄化问题越来越受到全球各国政府的关注。随着年龄的增

穿戴式绳驱动上肢外骨骼康复机器人的仿人臂骨架.pdf
本发明公开了一种穿戴式绳驱动上肢外骨骼康复机器人的仿人臂骨架,该仿人臂骨架包括有柔性肘关节组件(1)、上臂组件(2)、前臂组件(3)以及与绳子一端固定的绳紧固件,绳子另一端固定在电机输出轴的线轮上,通过电机牵引绳子运动实现康复者的肩部和肘部基于生物学机理的运动。本发明设计的仿人臂骨架能够实现康复者的上肢的抬臂、摆臂、转臂以及肘关节的内屈外伸运动,并能够提高外骨骼康复机器人的安全性。
外骨骼式上肢康复机器人.pdf
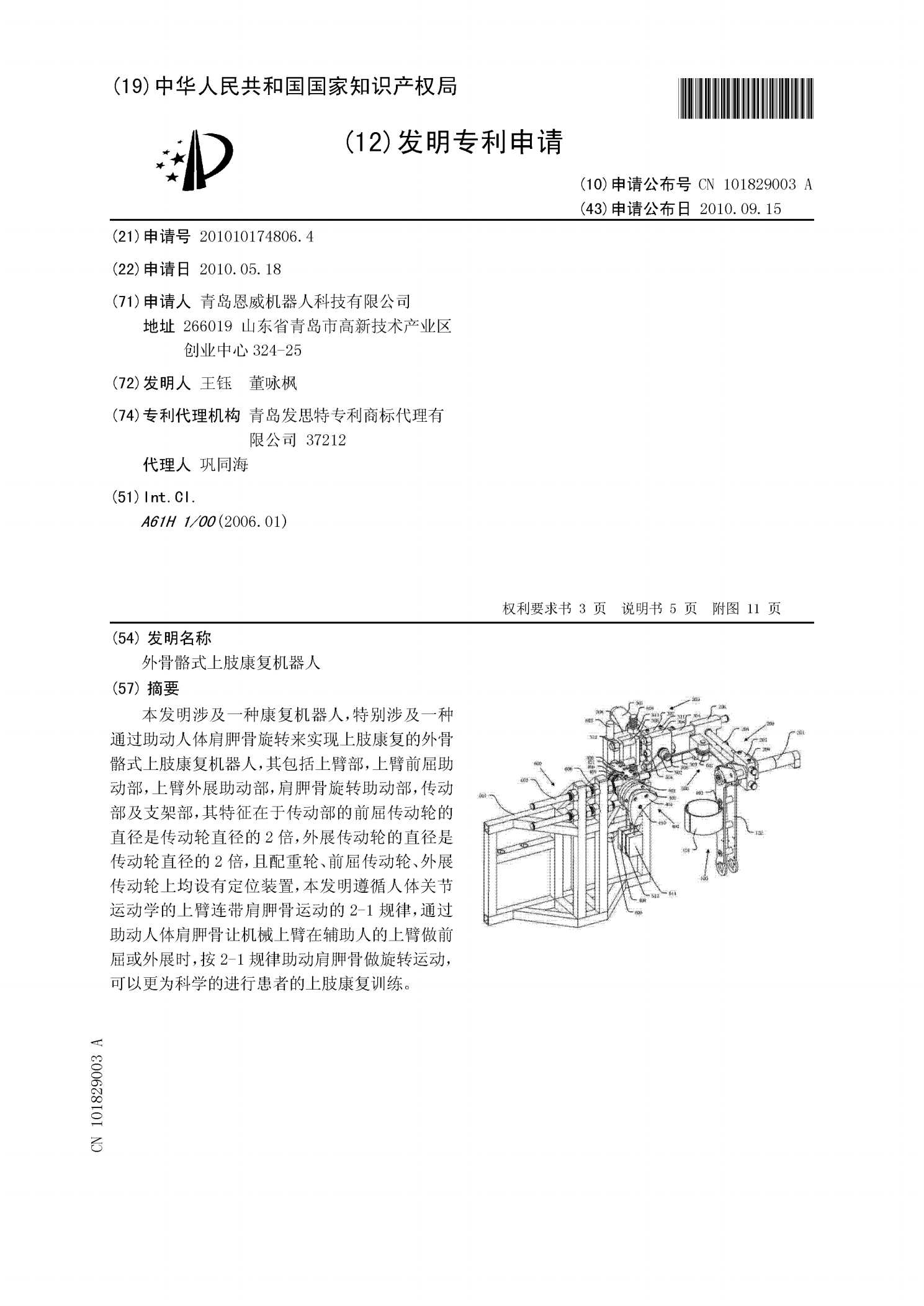
本发明涉及一种康复机器人,特别涉及一种通过助动人体肩胛骨旋转来实现上肢康复的外骨骼式上肢康复机器人,其包括上臂部,上臂前屈助动部,上臂外展助动部,肩胛骨旋转助动部,传动部及支架部,其特征在于传动部的前屈传动轮的直径是传动轮直径的2倍,外展传动轮的直径是传动轮直径的2倍,且配重轮、前屈传动轮、外展传动轮上均设有定位装置,本发明遵循人体关节运动学的上臂连带肩胛骨运动的2-1规律,通过助动人体肩胛骨让机械上臂在辅助人的上臂做前屈或外展时,按2-1规律助动肩胛骨做旋转运动,可以更为科学的进行患者的上肢康复训练。?
穿戴式下肢康复机器人的研究.pdf
哈尔滨工程大学硕士学位论文穿戴式下肢康复机器人的研究姓名:赵豫玉申请学位级别:硕士专业:机械电子工程指导教师:张立勋20090301要摘康复训练机器人技术是近年来迅速发展的一门新兴技术,是机器人技术在医学领域的新应用,经过几十年的发展已经取得了很大的成果。国外的康复机器人研究比较发达,而我国在康复工程领域的研究刚刚起步,因此课题的研究更具有实际应用意义。本课题研究的是穿戴式下肢康复机器人,它是康复训练机器人的一种,它可以固定在人身上,由驱动器驱动模仿正常人的步态,从而带动患者进行走步训练,使下肢有运动障碍