
一种轮式机器人底盘.pdf

一条****丹淑

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种轮式机器人底盘.pdf
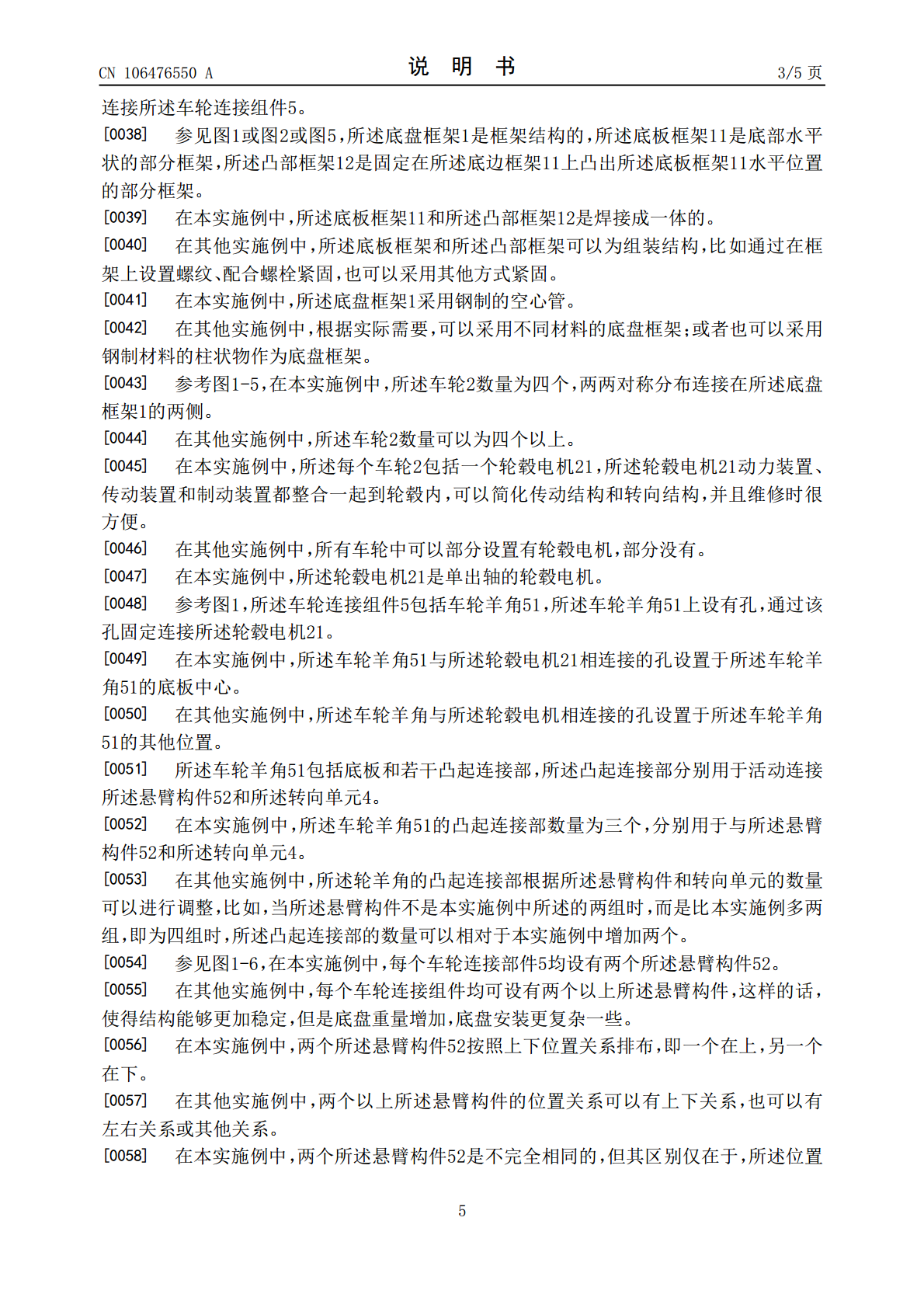
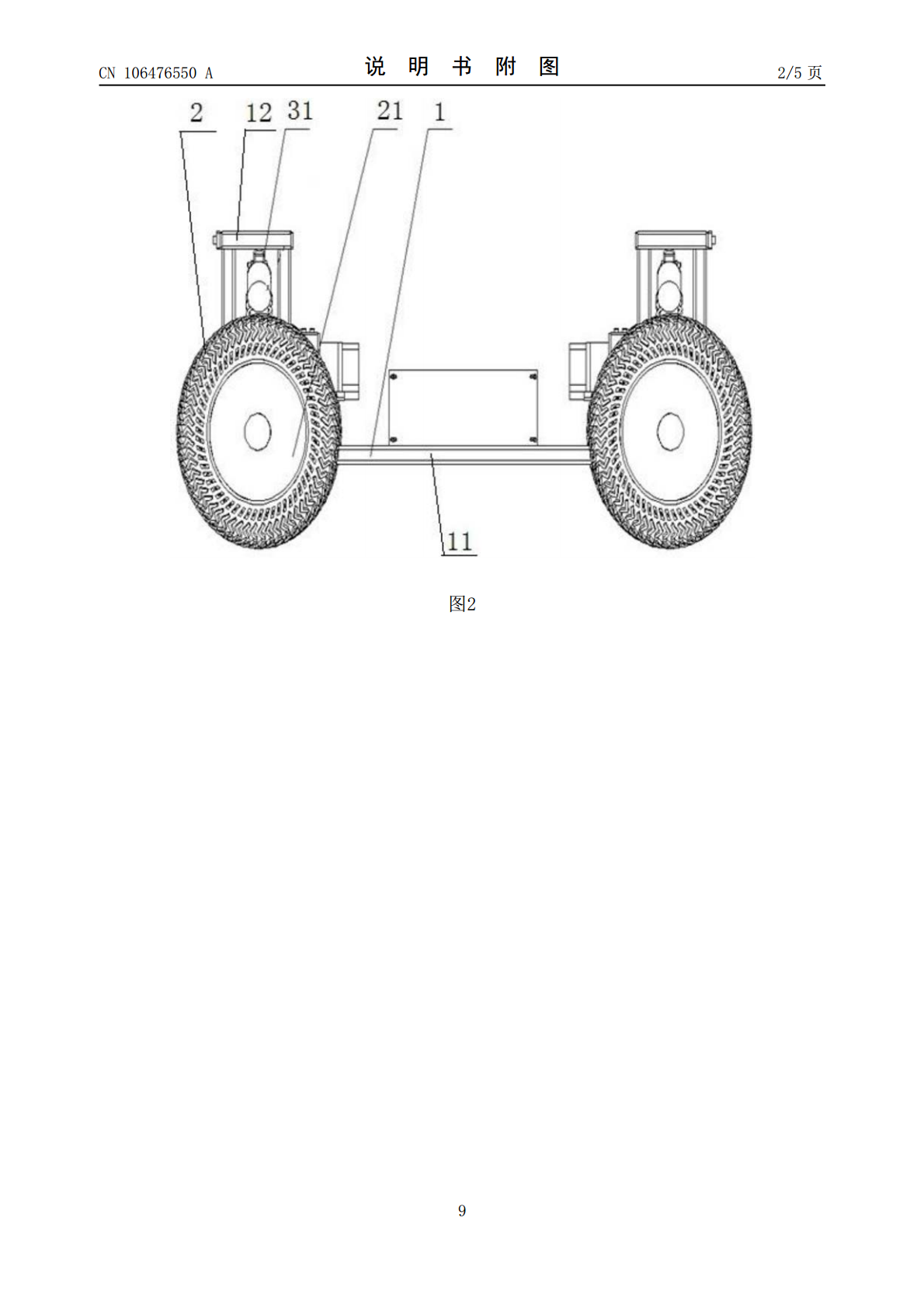
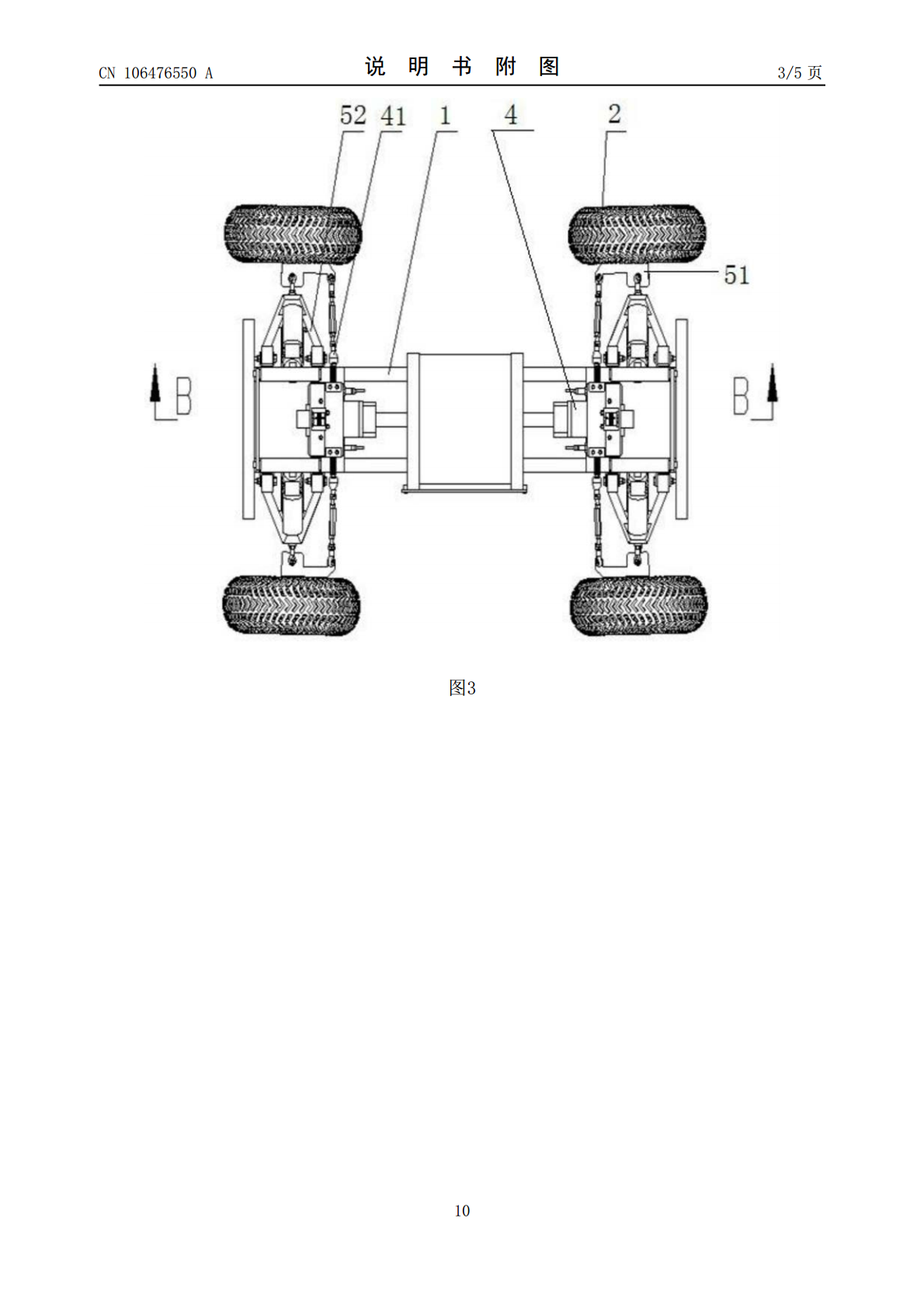
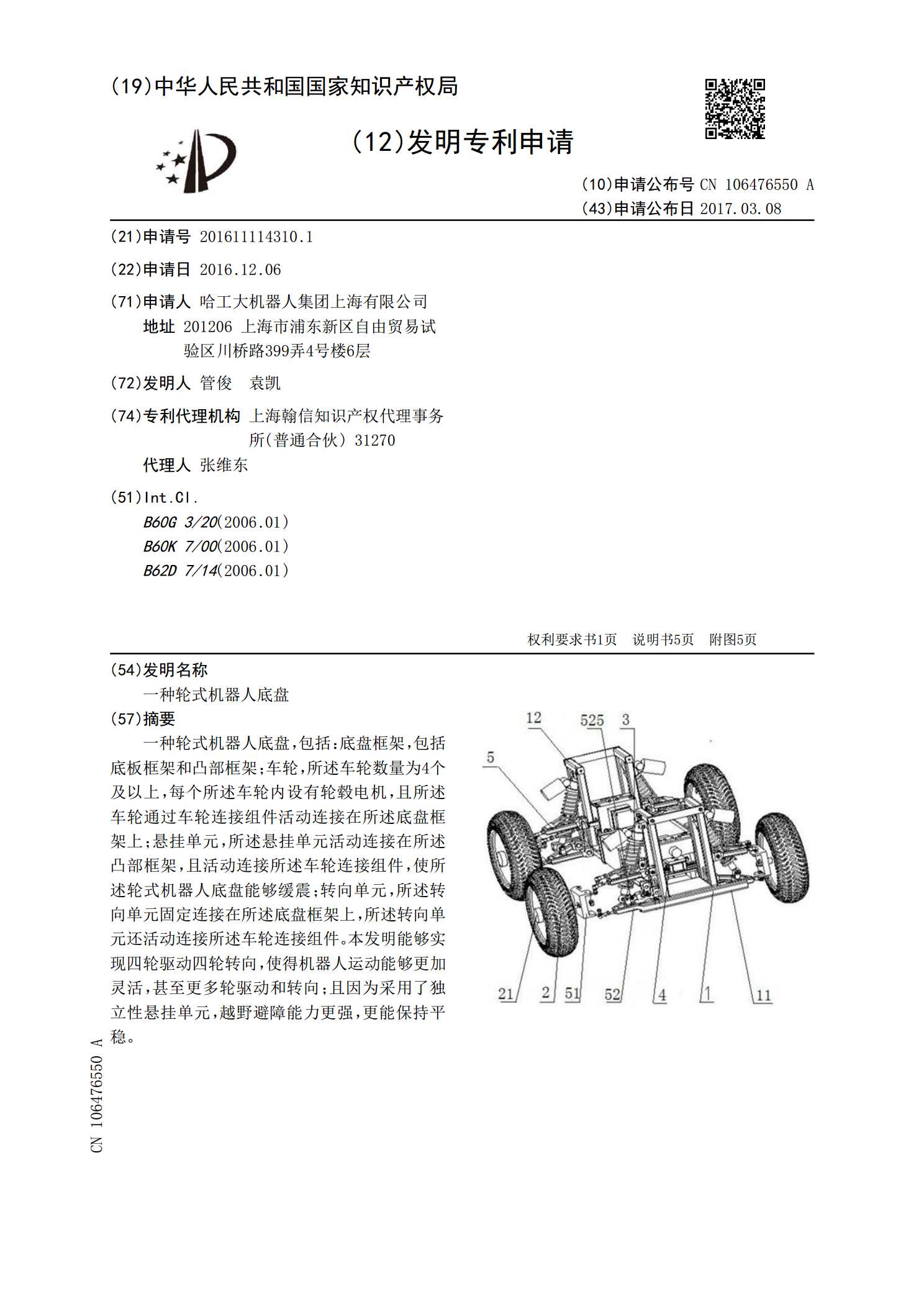
一种轮式机器人底盘,包括:底盘框架,包括底板框架和凸部框架;车轮,所述车轮数量为4个及以上,每个所述车轮内设有轮毂电机,且所述车轮通过车轮连接组件活动连接在所述底盘框架上;悬挂单元,所述悬挂单元活动连接在所述凸部框架,且活动连接所述车轮连接组件,使所述轮式机器人底盘能够缓震;转向单元,所述转向单元固定连接在所述底盘框架上,所述转向单元还活动连接所述车轮连接组件。本发明能够实现四轮驱动四轮转向,使得机器人运动能够更加灵活,甚至更多轮驱动和转向;且因为采用了独立性悬挂单元,越野避障能力更强,更能保持平稳。
一种轮式机器人底盘.pdf
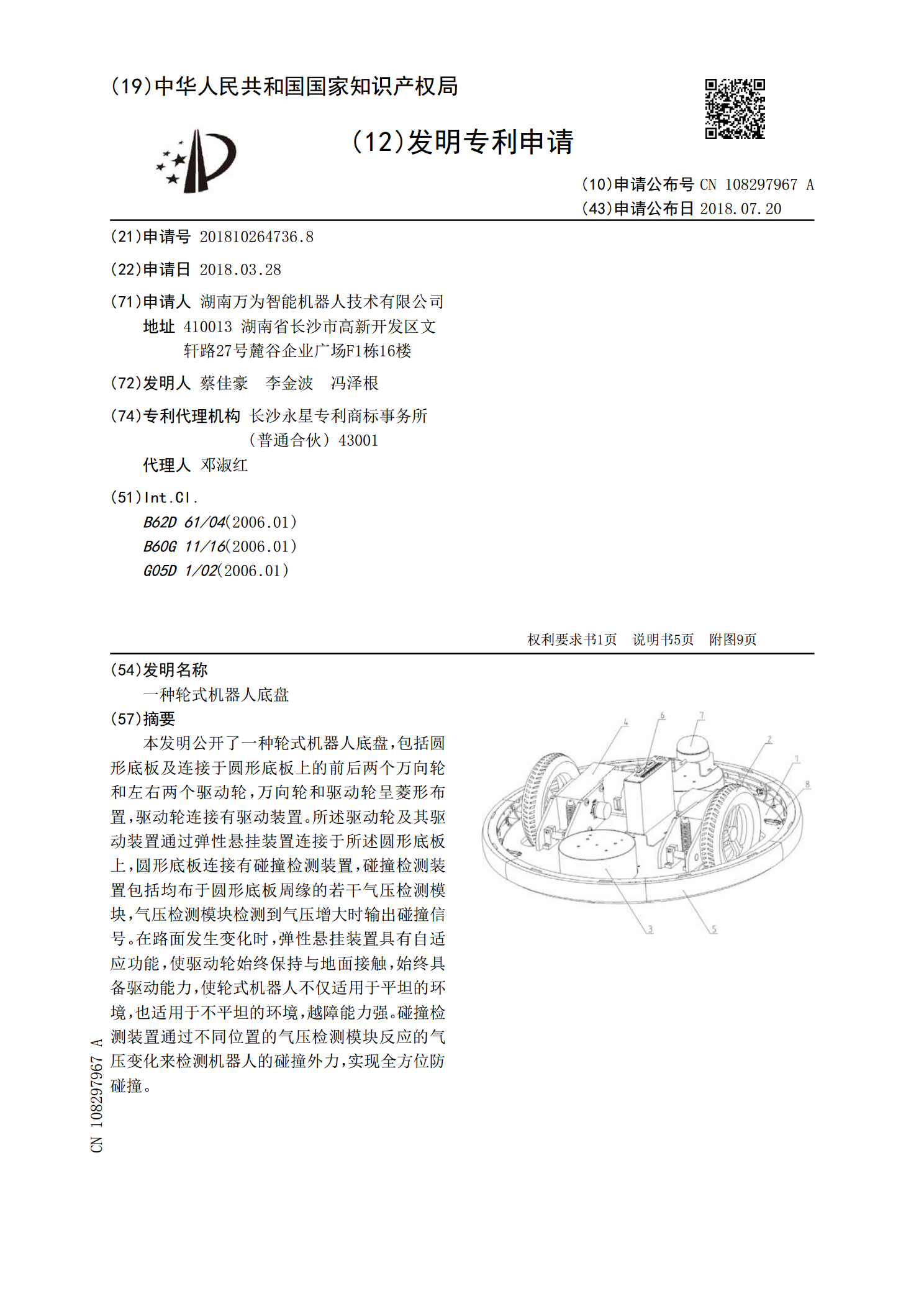
本发明公开了一种轮式机器人底盘,包括圆形底板及连接于圆形底板上的前后两个万向轮和左右两个驱动轮,万向轮和驱动轮呈菱形布置,驱动轮连接有驱动装置。所述驱动轮及其驱动装置通过弹性悬挂装置连接于所述圆形底板上,圆形底板连接有碰撞检测装置,碰撞检测装置包括均布于圆形底板周缘的若干气压检测模块,气压检测模块检测到气压增大时输出碰撞信号。在路面发生变化时,弹性悬挂装置具有自适应功能,使驱动轮始终保持与地面接触,始终具备驱动能力,使轮式机器人不仅适用于平坦的环境,也适用于不平坦的环境,越障能力强。碰撞检测装置通过不同位
一种轮式巡检机器人底盘.pdf
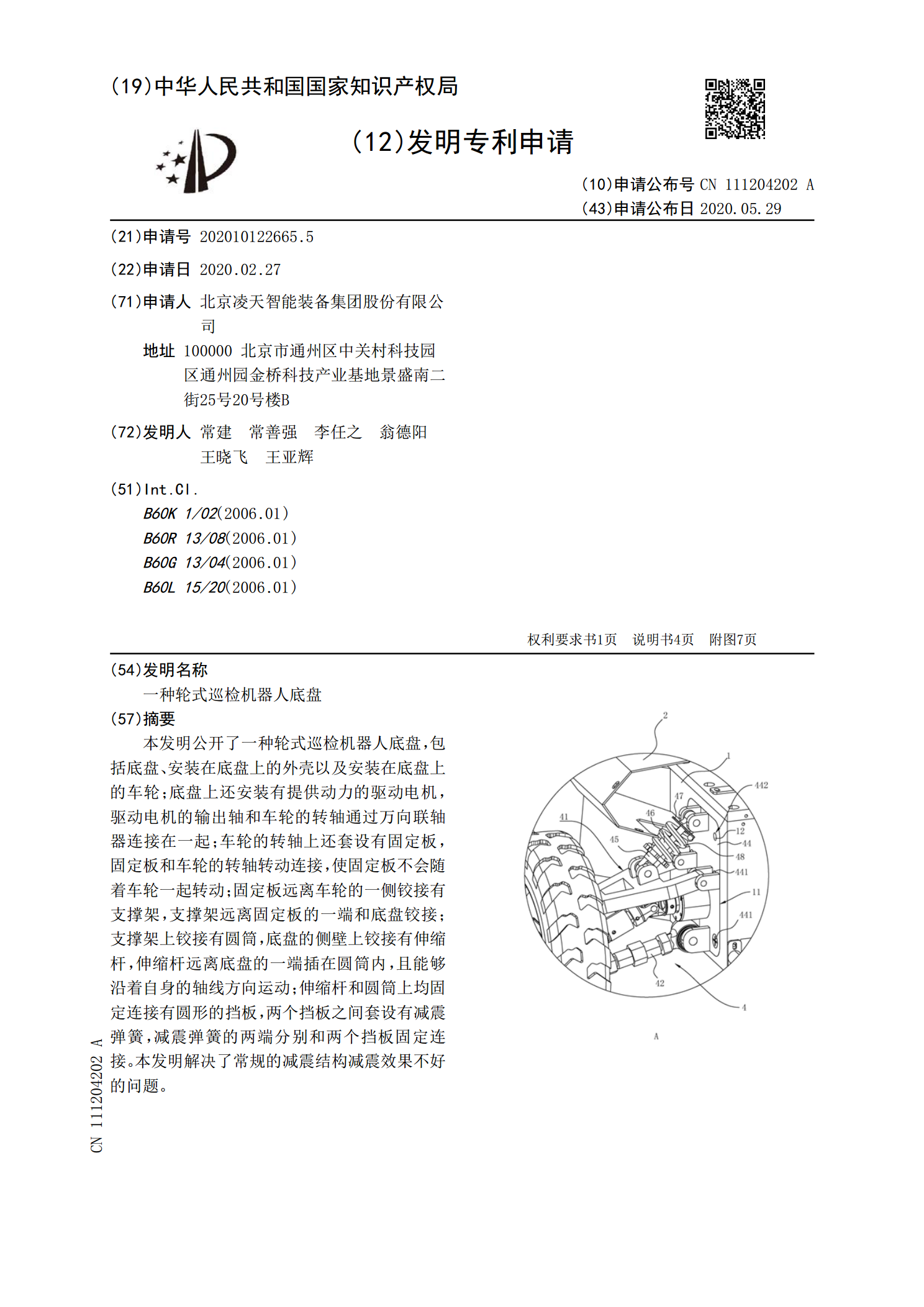
本发明公开了一种轮式巡检机器人底盘,包括底盘、安装在底盘上的外壳以及安装在底盘上的车轮;底盘上还安装有提供动力的驱动电机,驱动电机的输出轴和车轮的转轴通过万向联轴器连接在一起;车轮的转轴上还套设有固定板,固定板和车轮的转轴转动连接,使固定板不会随着车轮一起转动;固定板远离车轮的一侧铰接有支撑架,支撑架远离固定板的一端和底盘铰接;支撑架上铰接有圆筒,底盘的侧壁上铰接有伸缩杆,伸缩杆远离底盘的一端插在圆筒内,且能够沿着自身的轴线方向运动;伸缩杆和圆筒上均固定连接有圆形的挡板,两个挡板之间套设有减震弹簧,减震弹
一种带减震底盘的轮式机器人.pdf
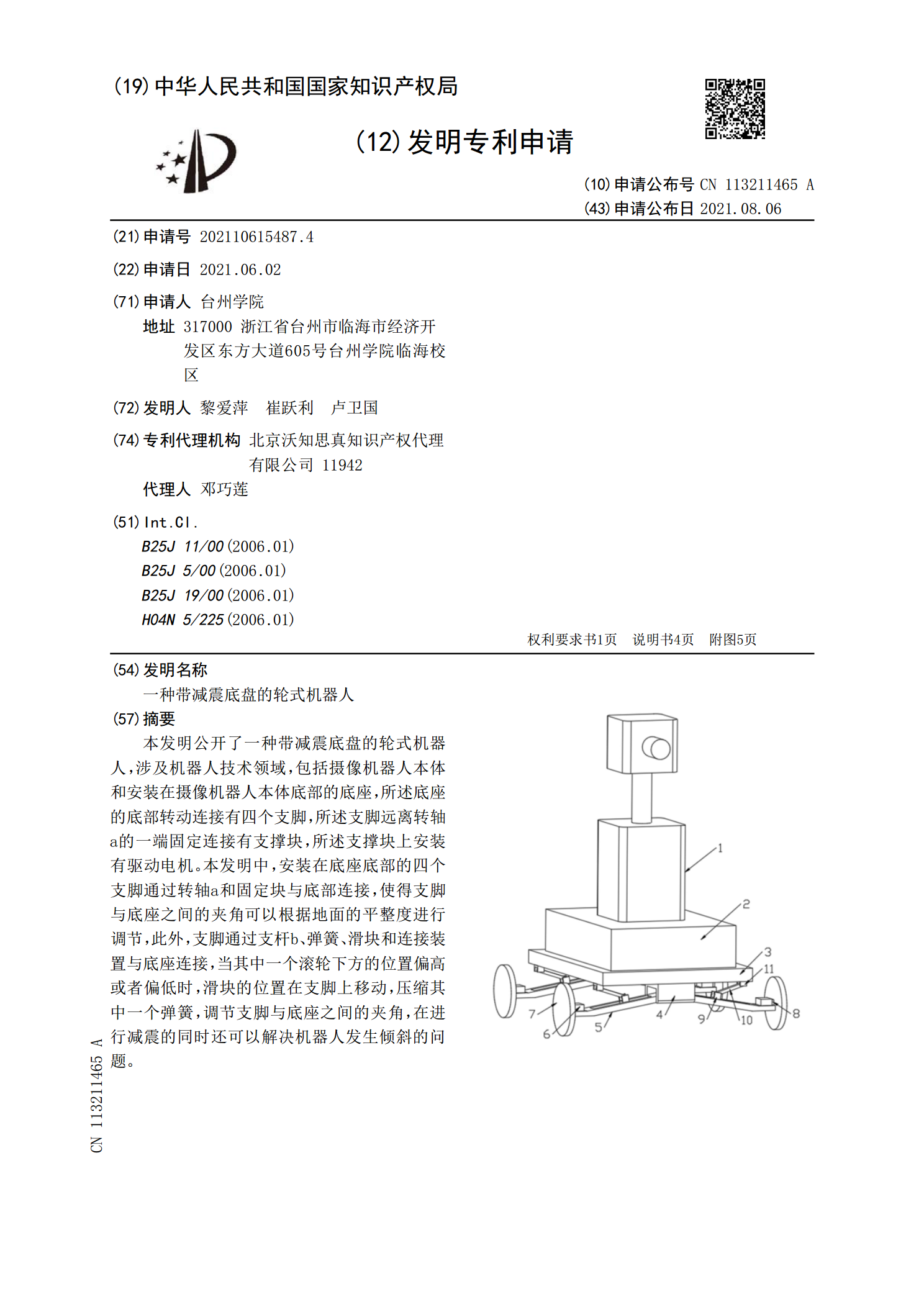
本发明公开了一种带减震底盘的轮式机器人,涉及机器人技术领域,包括摄像机器人本体和安装在摄像机器人本体底部的底座,所述底座的底部转动连接有四个支脚,所述支脚远离转轴a的一端固定连接有支撑块,所述支撑块上安装有驱动电机。本发明中,安装在底座底部的四个支脚通过转轴a和固定块与底部连接,使得支脚与底座之间的夹角可以根据地面的平整度进行调节,此外,支脚通过支杆b、弹簧、滑块和连接装置与底座连接,当其中一个滚轮下方的位置偏高或者偏低时,滑块的位置在支脚上移动,压缩其中一个弹簧,调节支脚与底座之间的夹角,在进行减震的同
一种翻滚轮式机器人底盘.pdf
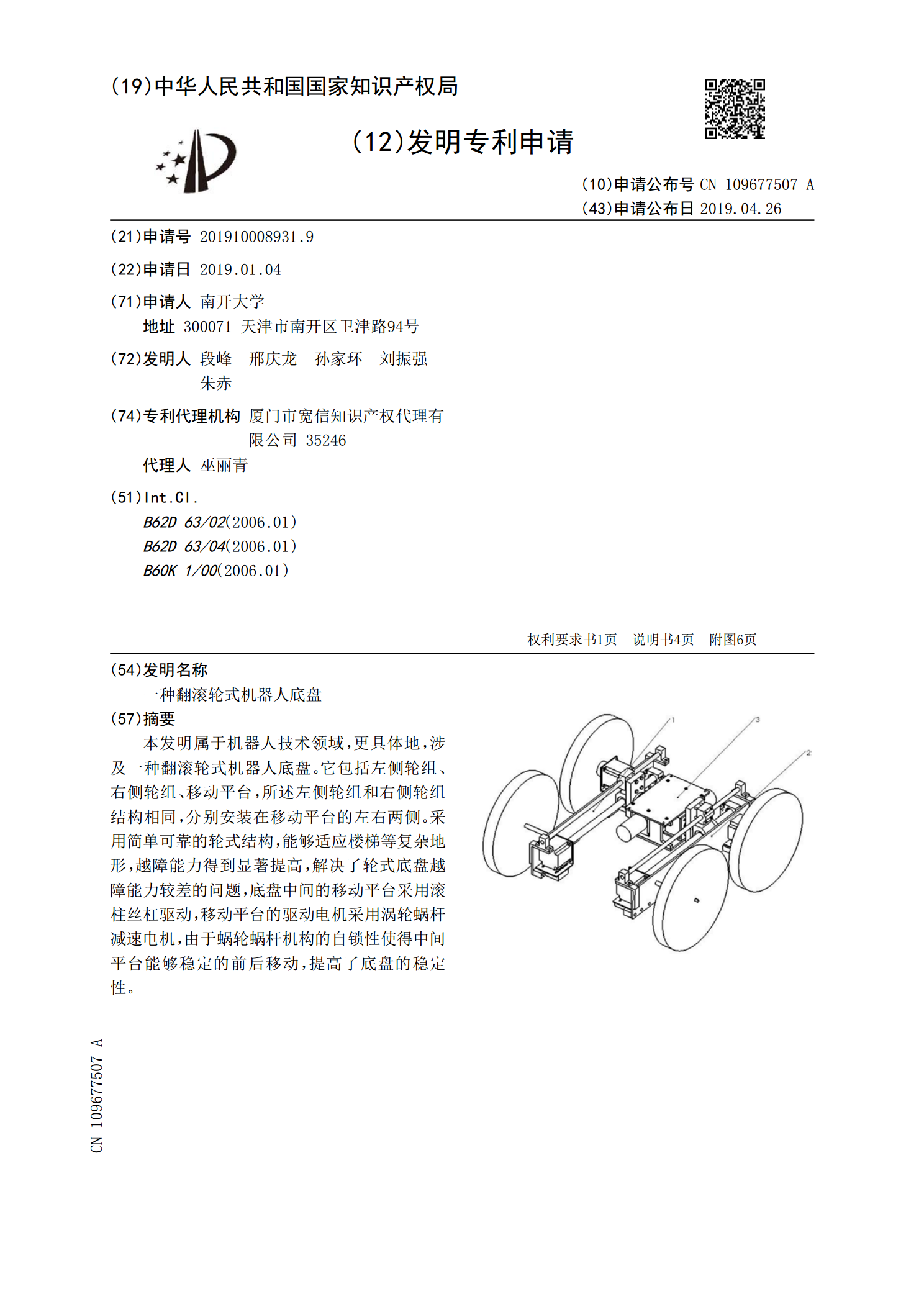
本发明属于机器人技术领域,更具体地,涉及一种翻滚轮式机器人底盘。它包括左侧轮组、右侧轮组、移动平台,所述左侧轮组和右侧轮组结构相同,分别安装在移动平台的左右两侧。采用简单可靠的轮式结构,能够适应楼梯等复杂地形,越障能力得到显著提高,解决了轮式底盘越障能力较差的问题,底盘中间的移动平台采用滚柱丝杠驱动,移动平台的驱动电机采用涡轮蜗杆减速电机,由于蜗轮蜗杆机构的自锁性使得中间平台能够稳定的前后移动,提高了底盘的稳定性。